写在前面
如今,自动驾驶汽车已经成为各大车企竞相研发的领域之一。相对于传统汽车,自动驾驶汽车依靠系统中的感知、决策、控制三大子系统完成汽车的无人驾驶任务。自动驾驶控制系统的研发必须把该系统的安全性放在第一位,而如何保证系统的安全性成为研发中最具挑战性的难题。为了提高控制软件的开发效率和品质,基于 MATLAB/Simulink 的 MBD(Model- basedDevelopment)开发方法,文章介绍了一套控制软件算法的仿真测试环境,并使用该环境对控制软件进行了测试,达到了预期的目的。
1 MIL 环境的搭建及有效性验证
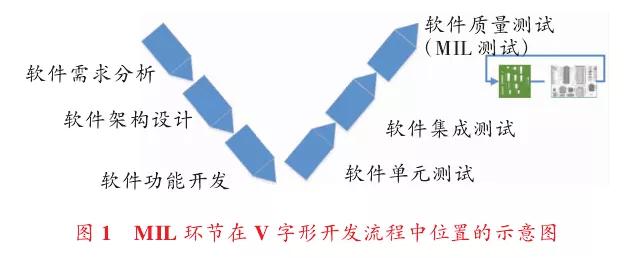
在 V 字形开发流程中,MIL 测试环节的位置,如图 1 所示。
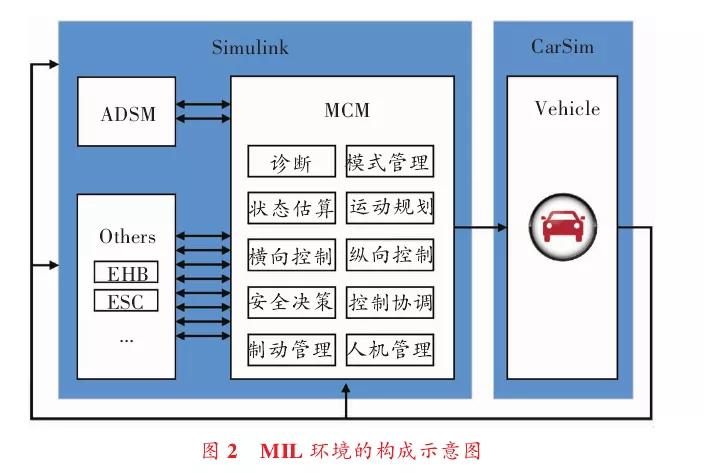
文章介绍的 MIL 环境主要分为 4 个部分,如图 2所示。
ADSM
1)ADSM (Autonomous Driving Service Module)。ADSM 模型主要包含传感器对环境的感知、数据融合和轨迹规划等功能。其中,传感器对环境的感知部分由CarSim 中的 Sensor 模型来模拟,其它部分由 ADSM 中的模型来完成。
MCM
2)MCM(Motion Control Module)。该部分主要包含车辆的模式管理、横向控制、纵向控制、安全决策、人机管理等模型。这部分值得注意的是,搭建的自动驾驶车辆运动控制 MIL 仿真模型的主要目的之一就是为了测试基于模型开发的 MCM控制器的功能是否满足需求,在设计智能 PHEV 系统 MIL 平台时,更多考虑的是如何仿真实现 MCM的所有功能,因此另外 3 个部分是围绕如何实现 MCM功能来设计的。
Vehicle
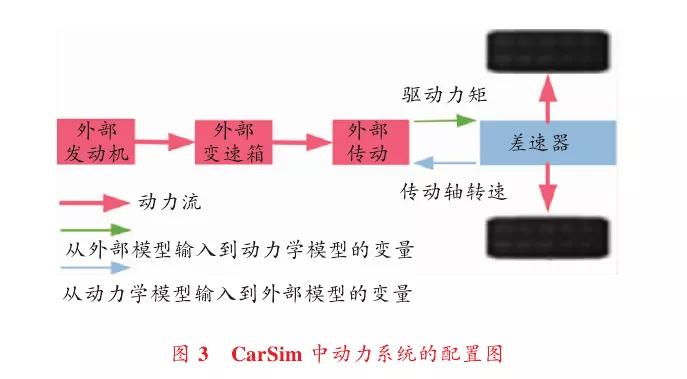
3)Vehicle。该模型由车辆动力学仿真工具 CarSim来完成,通过 S- Function 的形式和 Simulink 中的控制算法模型进行联合仿真。CarSim 中动力系统的设置,如图 3 所示,其中原车中的发动机、变速箱等部分被屏蔽掉,在差速器的输入端接入 MCM发来的驱动扭矩指令,另外再接入从 MCM发来的转向盘转角指令和制动主缸压力指令,CarSim 输出车辆的坐标、速度、加速度、Yaw、Row、转向盘转角、车道线和障碍物信息等。
光流和自动驾驶
4)Others。 这 部 分内 容 包括 电 子 液 压 制 动 系统(EHB:Electric Hydraulic Brake)、 车 身 稳 定 控 制 器(ESC:Electronic Stability Control)等,为了提高仿真效率,这部分的控制器模型大部分是使用现有车型的控制器模型做简化后集成的。
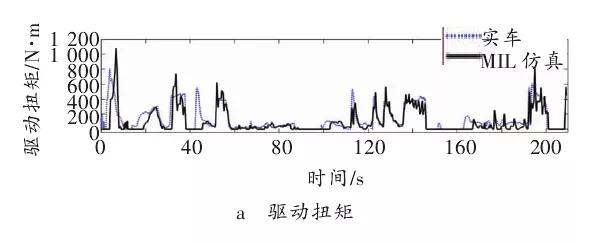
上述 MIL 环境搭建好之后,为了验证该环境的正确性,选取了一种工况,采集实车的驱动扭矩、制动主缸压力和转向盘转角数据,同时在 MIL 模型中模拟同一种工况,记录驱动扭矩、制动主缸压力和转向盘转角,并与实车数据进行了对比,如图 4 所示。从对比结果来看,MIL 仿真结果在趋势上与实车结果是吻合的,因此,该环境可以用来对自动驾驶车辆控制算法进行功能性验证和测试。
参考文献:
[1] 张剑锋,马玲,李广召. 自动驾驶运动控制算法的模型在环测试[J].汽车工程师,2019,ISSN:1674-6546
[2] 成沢文雄,佐藤真也,安島俊幸,等. 制御システムの高度化·高信頼化を支える モデルベース開発技[J]. 組込みシステムの進化を加速する開発技術とソリューショ,2009,91(5):426- 427.
[3] SMITH P F, PRABHU S M, FRIEDMAN J. Best Practices forEstablishing a Mode-based Design Culture[J]. SAE Paper, 2007, 44(1):881-884.
[4] 潘晓东,龚俊星,刘祥环. 电动汽车整车控制软件测试用例设计方法及应用[J]. 兵器装备工程学报,2017,38(11):163-168.
来源:Kittcamp自动驾驶学院


