文件大小:1.91M
转自:我爱计算机视觉 ,作者CV君
基于单目图像的3D目标检测是在输入RGB图像的情况下估计目标的3D包围框,在自动驾驶领域非常有用。
近期来自中科院沈阳自动化所等单位的学者公布论文提出一种实时的单目3D目标检测算法RTM3D,快速版30fps,并且代码将开源。
在公众号对话框回复【无人车0011】即可获取本篇论文。
以下是作者信息:
RTM3D算法的主要思路,如图:
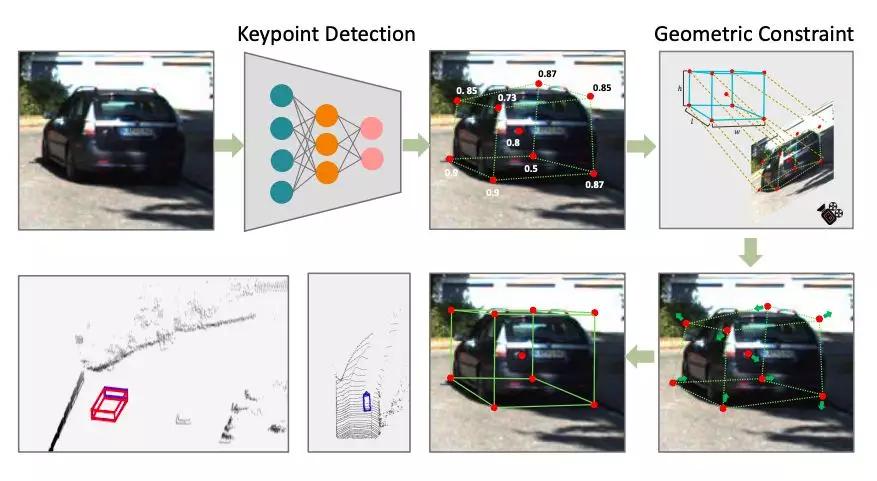
输入RGB图像,经过深度神经网络,预测目标的9个空间点(1个中心点,8个顶点),使用几何限制估计更加精确的9个空间点,进而找到目标的3D包围框。
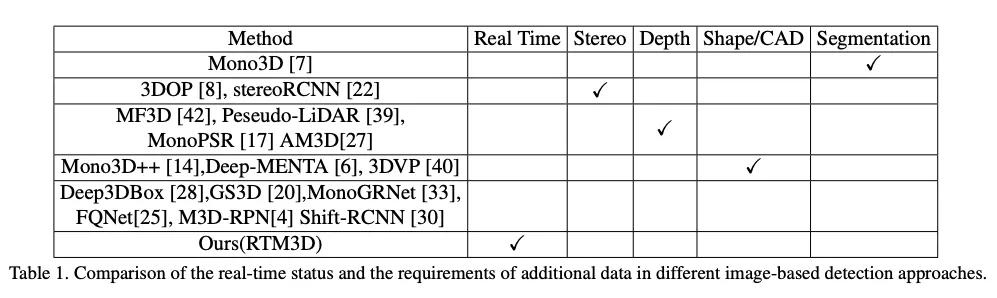
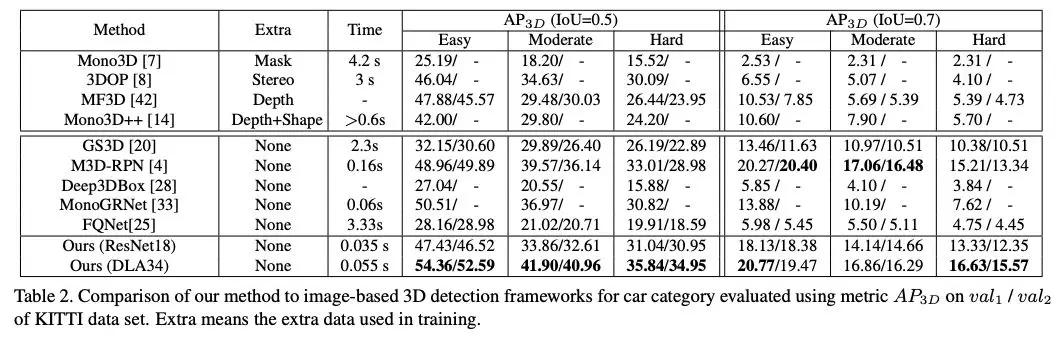
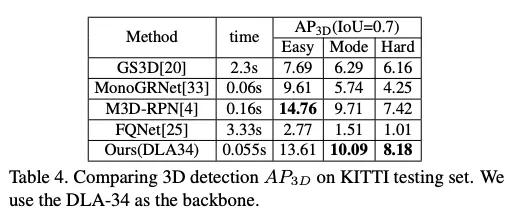
下表为该文算法与其他3D目标检测方法比较,RTM3D不需要其他外部数据,而且速度达到实时。
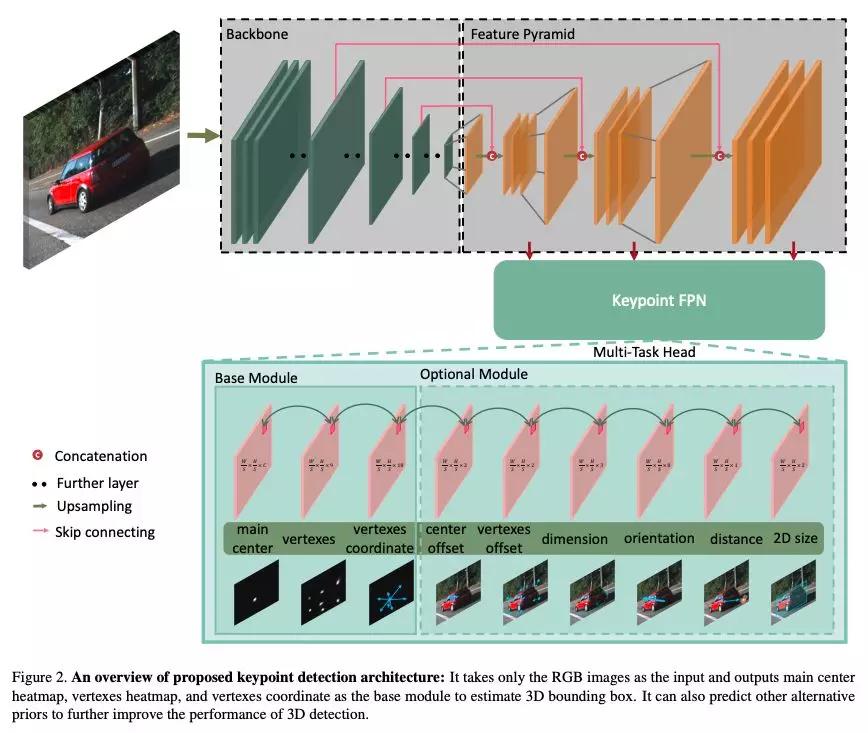
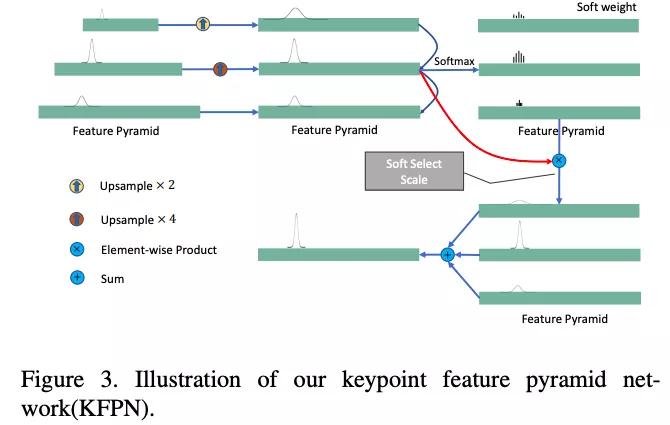
算法架构图:
实验结果
在KITTI数据集上的实验结果,该算法在精度达到SOTA的同时,是目前少数达到实时的3D目标检测算法。

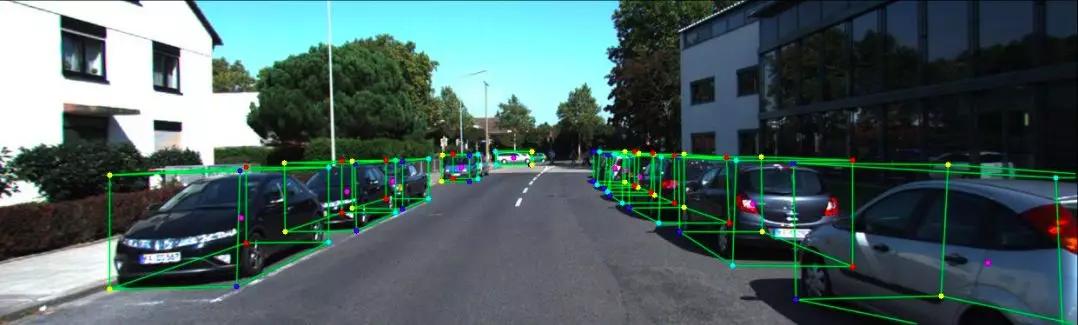
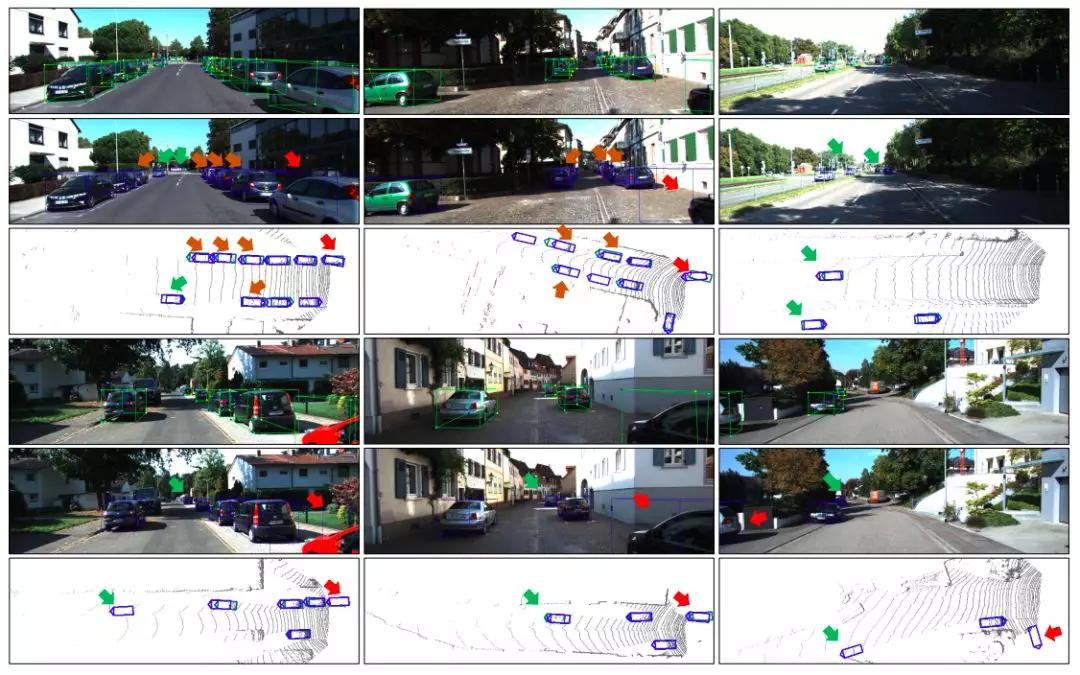
检测结果示例:
代码地址:
https://github.com/Banconxuan/RTM3D
目前代码还未放出,期待早日开源。