重磅:Keysight官宣加入UCIe联盟
2022年3月,Intel、AMD、ARM、高通、三星、台积电、ASE、Google Cloud、Meta和微软十家巨头成立Chiplet标准联盟,制定了通用Chiplet的高速互联标准UCIe(Universal Chiplet Interconnect Express)。同年,作为测试测量领域优质的供应商Keysight宣布加入UCIe
2023-02-22636
某轿车铝合金仪表板横梁分析及优化
本文转自数字仿真论坛王月周建丰(中国第一汽车股份有限公司研发总院,长春130000)【摘要】轻质材料仪表板横梁取代钢制仪表板横梁已成为一种必然趋势,鉴于铝合金在冲压件和挤压件上的材料优势,使得铝合金仪表板横梁应用更加广泛。以某轿车铝合金仪表板横梁
2023-02-221395
汽车线束耐久特性与触点压降测试方法的研究
随着汽车电气化与智能化水平的逐渐提高,线束的数量日益庞大。虽然总线技术在现代汽车中广泛应用,使得导线及接插件的数量进一步减少,庞大的线束系统得到精简,提高了线束的轻量化水平,但是线束作为汽车电路的基本网络主体,在汽车电气系统中的地位仍然无法
2023-02-22535
某项目悬置布置方案案例
一、动力总成悬置系统的设计原则一般在分析动力总成悬置系统振动问题时,由于其固有频率远远低于动力总成和车架弹性体振动频率,因此习惯上将动力总成看做空间运动刚体,把车架看成固定刚体,弹性悬置元件可以简化为具有三个主刚度轴的弹簧阻尼元件。由理论力
2023-02-224192
国轩高科获大众汽车集团电芯测试实验室资质认证
2月21日,国轩高科正式获得大众汽车集团电芯测试实验室资质认证。此次认证标志着国轩高科测试验证能力获得大众汽车集团认可,并正式进入全球领先技术管理体系。国轩高科电芯测试实验室认证授予仪式现场作为全球最大的汽车集团之一,大众汽车集团在动力电池的
2023-02-22659
大众汽车新的热管理集成思路
在今年的2023 Tech Day上,大众汽车对电池、充电和电子元件领域进行电动汽车创新进行了展望。其中一个最为明确的信号是,大众会进一步垂直整合电驱动系统中的关键零部件。大众目前已经完全负责了电芯和电机电控的技术,现在大众汽车希望在内部也负责开发逆变
2023-02-211119
专家撰稿 | 中国汽车数据中心提供完善的ICV仿真和验证解决方案
本文作者JIAXU MENG中国汽车技术研究中心,智能汽车数据部研发工程师QIJIA SUN智能汽车数据部研发工程师YINDONG WANG智能汽车数据部研发工程师QINGXIA LI智能汽车技术部研发工程师HUIYU XIE智能汽车数据部高级主管SHUAI ZHAO智能汽车事业部总监PENGCHAO ZHAO
2023-02-21922
商用车辆车道保持辅助系统试验方法
商用车辆车道保持辅助系统是一种基于计算机视觉和传感器技术的驾驶辅助系统,旨在帮助司机在车道保持过程中减少人为错误,提高驾驶安全性。为了评估车道保持辅助系统的性能,需要进行一系列试验。《商用车辆车道保持辅助系统性能要求及试验方法》规定了商用车
2023-02-211292
直播|紧凑高效的汽车雷达传感器测试
紧凑高效的汽车雷达 传感器测试测试汽车雷达传感器的功能和性能是一个持续的开发和认证的过程。以前想要准确地量化诸如角度和范围分辨率以及精度等参数,需要投入大量测试资源,涉及到庞大、昂贵、不灵活的系统。而现在,雷达传感器开发人员开发了使用一种新
2023-02-21357
商用车辆车道保持辅助系统性能性能要求
商用车辆车道保持辅助系统的性能要求非常严格,主要包括车道保持准确性、可靠性、稳定性和安全性等方面。首先,车道保持辅助系统需要具备极高的车道保持准确性,能够精准地控制车辆行驶在车道内,防止偏离车道和发生事故。其次,系统需要具有较高的可靠性,能
2023-02-21767
商用车辆车道保持辅助系统一般要求
商用车辆车道保持辅助系统的性能一般要求包括车道保持效果、反应速度、平顺性和适应性等方面。首先,车道保持辅助系统需要具备良好的车道保持效果,即能够稳定控制车辆在车道内行驶,准确跟踪车道线并及时进行车道偏移纠正。其次,系统需要具有较快的反应速度
2023-02-211360
美国汽车空调制冷剂规则新提案
2020年,美国国会颁布《美国创新和制造业法案》(AIM法案),授权环境保护署(EPA)对氢氟碳化物(HFCs)实施配额管理,以此减少HFCs对气候产生的影响。2022年12月7日,EPA负责人Michael S. Regan签署了一份涵盖美国汽车空调HFCs制冷剂使用规则的新提案,并于
2023-02-201262
商用车AEB系统测试场景构建及仿真研究
文章从商用车自动紧急制动功能测试评价技术着手,基于场景元素分类构建商用车自动驾驶测试场景,建立自动紧急制动典型场景与控制模型,并通过仿真验证商用车AEB测试场景搭建与测试评价方法的有效性。1 场景采集与场景元素分类1.1 自动驾驶测试场景概述测试场
2023-02-201841
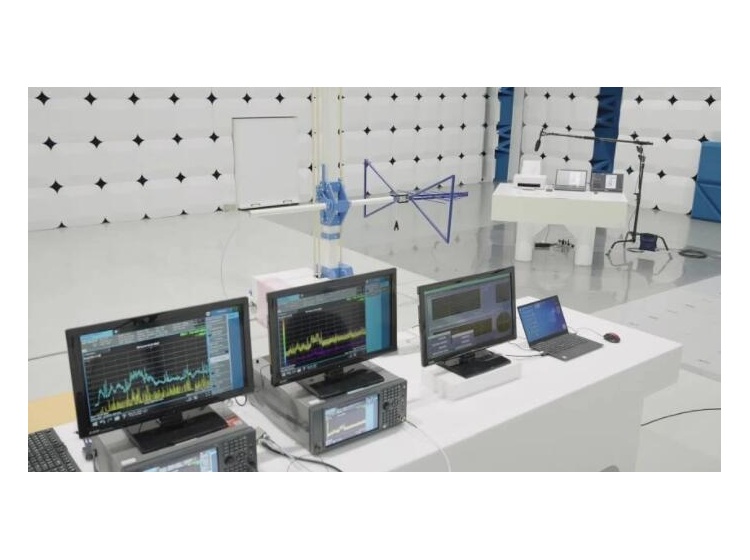
- 东扬精测与是德科技(Keysight)联合开发的EMC测试解决方案
2023-02-20
混合动力汽车热管理开发研究
文章来源:东风柳州汽车有限公司21世纪以来,人类面临剧烈的气候变化。由于全球二氧化碳排放和温室气体猛增,导致生命系统受到威胁,为此世界各国以全球协约的方式减排温室气体,我国也提出了2030年碳达峰和2060年碳中和的目标。在这样的大背景下,我国政府和
2023-02-20931
悬置动力总成合成质心加速度载荷谱测试及分析
摘要:为快速准确地开发发动机动力总成悬置系统,以发动机4点悬置布置方式为例,对原地怠速、原地升速、路试一挡急加速、路试二挡急加速4种常见工况进行加速度时域、频域及300 Hz滤波分析,并与动力总成合成质心加速度道路载荷谱计算结果对比。结果表明:质心加
2023-02-201094
车辆融合:开启汽车智能网联的新篇章
随着新一轮汽车产业革命和科技革命的蓬勃兴起,在网联化和软件定义汽车的潮流趋势下,智能网联汽车技术的发展也迎来了重大的机遇和挑战,汽车的智能网联特性也逐渐成为各大主机厂、用户的关注焦点,实现智能网联化的关键环节在于实现车辆融合,使得智能汽车的
2023-02-202103
奔驰将在中国启动L3有条件自动驾驶测试:开车不用看路 事故奔驰担责
在前不久的梅赛德斯-奔驰安全科技日上,奔驰公司表示,目前在中国,奔驰也将启动L3级有条件自动驾驶的测试,并积极与相关部门进行沟通。中国研发部门的专家团队,亦深度参与到Drive Pilot驾驶领航系统针对中国路况运行的设计优化中。首先,了解一下奔驰L3级Dr
2023-02-201370

- 捷豹路虎和NI联手开发ADAS解决方案
2023-02-20

