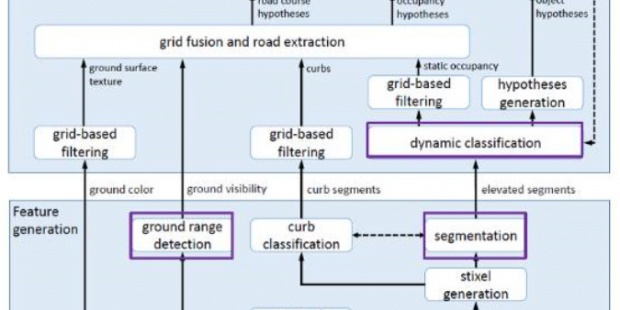
- 自动驾驶技术之——环境感知
2018-05-13
智能网联汽车产品模拟仿真测试可信度评估方法
2023-11-275118
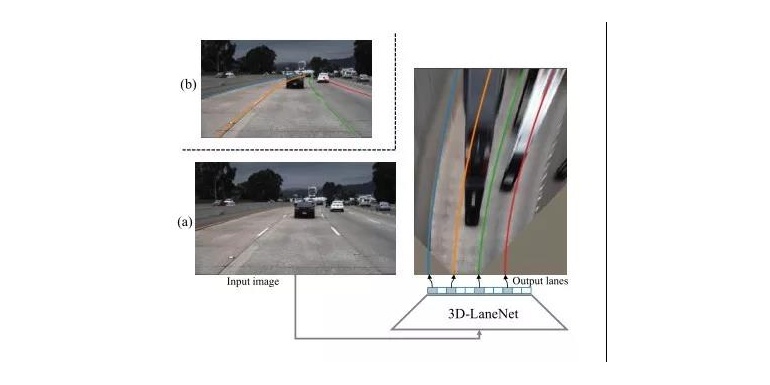
- 3D-LaneNet:端到端3D多车道检测网络
2019-04-11
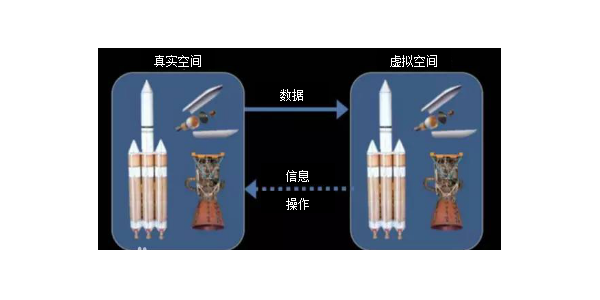
- 数字孪生技术在自动驾驶测试领域的应用研究概述
2021-03-29

- ADAS系统中驾驶员行为与状态检测(二)
2020-01-27

- 自动驾驶中相机和LiDAR数据融合方法与目标检测
2018-11-22

- 车规级安全芯片与芯片安全测试技术
2021-12-27

- 自动驾驶整车在环仿真平台研究及模拟实现
2020-06-05

- 沛岱:自动驾驶测试验证用例(TestCase)技术——交通事故分析和仿真重现
2018-12-08

- 自动驾驶之避障方法研究
2018-05-08

- ADAS的八大系统
2018-09-18
智能网联汽车视觉感知系统测评验证:性能评估与未来展望
2023-11-274373
智能网联汽车产品模拟仿真测试可信度评估框架
2023-11-274320
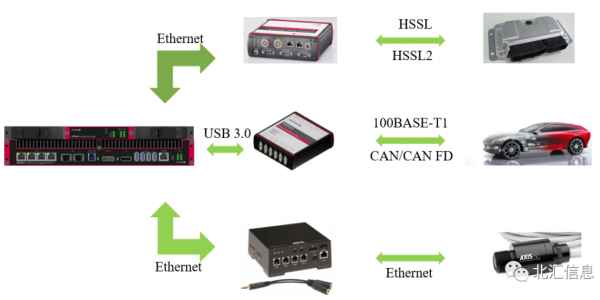
- 如何基于ADAS Logger和CANape搭建一个自动驾驶路试采集系统
2020-08-29
智能汽车环境感知中的长尾场景测试和错误目标、自然危害场景注入
2023-07-084272
- 汽车自动驾驶辅助系统电磁安全性研究
2021-08-27

- 自动驾驶测试机器人报告:国内自动驾驶机器人研究现状
2018-10-11
整车级V2X(Vehicle-to-Everything)应用层功能测试
2023-07-084155
基于自然驾驶场景数据库的L3智能汽车测试方法
自动驾驶技术的发展,将大大提高道路交通的安全性和效率。L3智能互联汽车逐渐走上了矢量生产阶段,而测试验证是衡量其功能的一个重要部分。目前,对于L3智能汽车的测试方法尚未有完整的指导方法。本文以中国汽车技术研究中心的自然驾驶场景数据库为基础,提出
2023-05-054143
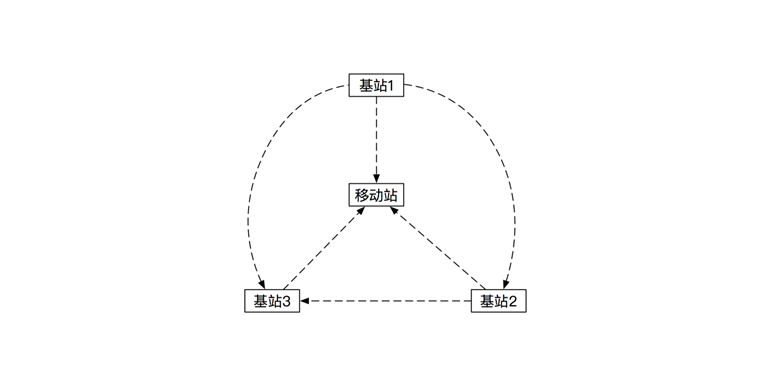
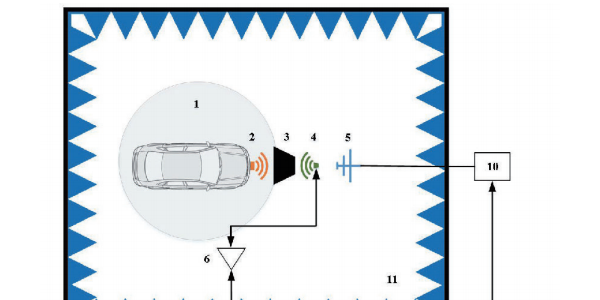
- 无线同步&实时自主位置解算: TJ-UWB定位系统性能分析
2018-09-21

