汽车自动驾驶测试场景四层抽象分级:定义与应用的技术深度解析
2023-11-172356

- OTSL发布全球首款实时毫米波雷达模拟器
2018-02-27
- ADAS与自动驾驶汽车仿真的六个方面
2019-03-30

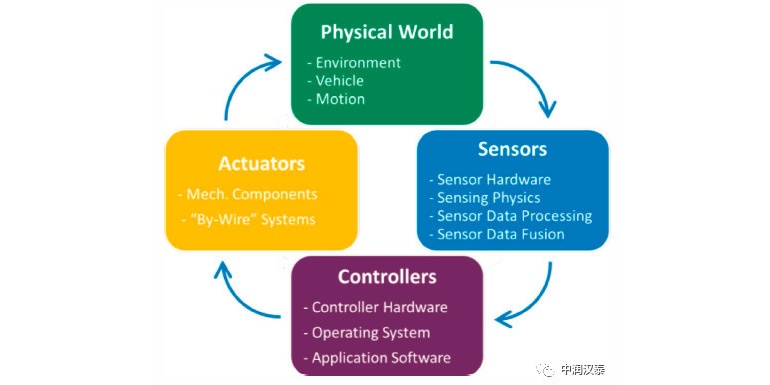
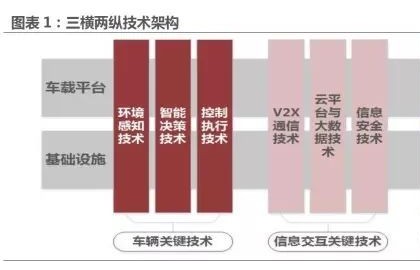
- 智能网联汽车的关键技术有哪些?
2019-01-30
真实场景到虚拟环境的重现方法
数字孪生就是在虚拟环境中建立一个和现实世界一致的模型。数字孪生技术将为自动驾驶仿真测试发展道路上的一大助力,是仿真测试的增效利器。百度在论文【37】提出一种用于自动驾驶端到端仿真的数据驱动方法:增强自动驾驶仿真(AADS)。该方法通过模拟交通流来
2022-12-222263
智能网联汽车辅助驾驶前向视觉感知性能要求测试
2023-11-272263
汽车自动驾驶测试场景抽象分级模型:提升系统全面性能评估的关键
2023-11-172207

- Uber ATG 近三年发表的自动驾驶论文合集
2019-08-15

- 沛岱与淞泓合作打开自动驾驶测试验证入口:构建自动驾驶场景数据库
2019-05-01
汽车自动驾驶测试具体场景及挑战
2023-11-172174
长安大学车联网与智能汽车测试场视频中英文版
Connected and Automated Vehicle (CAV) Test Field of Changan University is based on the Automotive Comprehensive Performance Test Field in Weishui camp
2018-11-212154

- ADAS传感器融合HIL系统演示
2018-10-08
- 自动驾驶之——测试验证技术盘点
2018-12-14
- 无人驾驶之激光雷达深度剖析
2018-03-16

- 智能汽车浪潮下,车内HMI设计究竟有怎样的新趋势
2018-05-07
自动驾驶车辆安全验证
2023-11-082112
- 多伦科技全面介入自动驾驶汽车驾驶能力测试
2019-05-14
- 无人驾驶推进时间表及五大技术领域关键节点
2018-03-02

