THOR假人千万身价的背后和启示
从第一具碰撞测试假人Sierra Sam诞生,数十年来,车辆碰撞试验假人在不断的发展和完善。美国很早就意识到了当前广泛使用的Hybrid III假人的不足,因此,上世纪80年代左右,美国高速公路交通安全管理局(NHTSA)就开始推动下一代全新碰撞假人THOR(Test Device
2023-01-06638
数据可用性:构建自然驾驶环境模型的数据集来源及应用
本文介绍了用于构建自然驾驶环境模型的数据集来源及应用。其中,原始数据集来自密歇根大学安阿伯分校的安全试验模型部署(SPMD)计划和基于车辆的综合安全系统(IVBSS)。此外,使用了包括图像增强现实模块的三维模型资产的ShapeNet数据集以及警方车祸报告。
2023-04-25638

- Racelogic发布新款多功能显示器
2020-10-22

- 柳州美桥采用Kistler压机实现灵活配置,精确压装
2021-05-06
噪声领域的专业英语词汇
2024-10-07636

- 高温材料力学测试应用的性能优选
2021-02-25
自动驾驶汽车数据分级
1、专控保护级数据外部环境数据环境感知数据。军事禁区(机密)、国家要害部门(秘密)等环境数据。2、国家监管保护级数据车辆数据1)网联终端软件数据:FOTA软
2021-10-08635
- 振动试验中的螺钉固定问题
2024-08-02

- 测试基础|汽车软件测试术语解释
2024-11-02

- 车辆ECU开发组件Woodward
2021-06-03
端到端学习在自动驾驶中的应用
端到端学习(End-to-End Learning)是一种从原始传感器数据到最终控制信号的直接映射方式,它已经在多个领域中取得了巨大成功。与传统的流水线方法相比,端到端方法在感知和控制模块之间没有外部间隙,同时很少嵌入人工定制的启发式算法,因此可以更有效地处
2023-04-20634
- 振动试验入门-振动试验装置基础知识3
2024-08-05
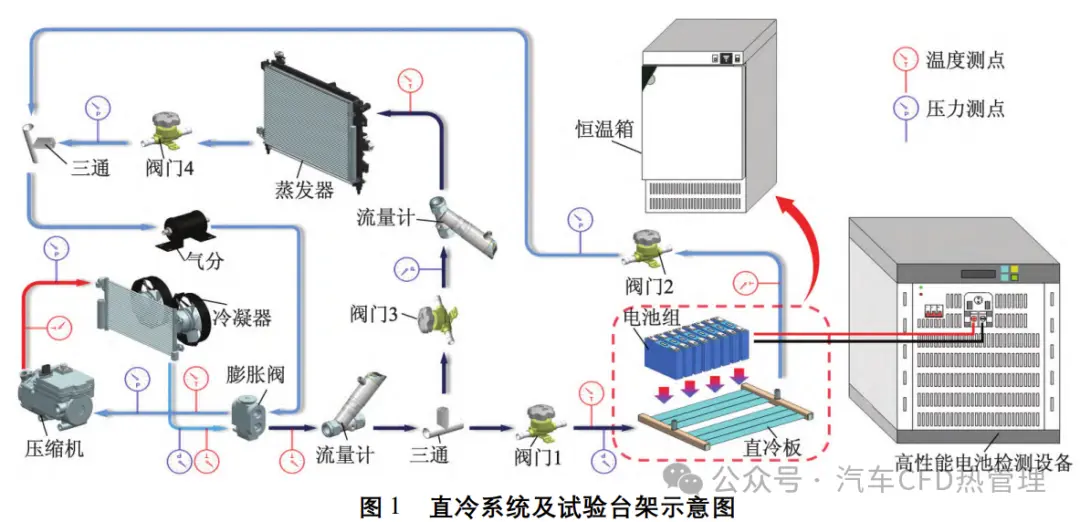
- 电动汽车电池组冷媒直冷系统工作特性的试验
2024-07-03

- 测试下一代汽车无线系统
2020-05-04
欧洲NCAP碰撞后安全与技术的发展
摘要:随着交通事故数量的不断增加,人们越来越意识到碰撞后安全问题的重要性。欧洲新车评估计划(NCAP)致力于研究和推广碰撞后安全技术,包括紧急救援app、高级eCall技术和车内传感器等。这些技术能够提高救援效率,减少受伤风险,并且有望在未来更广泛地应
2023-04-26631
自动驾驶系统中感知视觉的发展与挑战
随着自动驾驶技术的不断发展,感知视觉系统已经成为了自动驾驶系统中最为重要的一环。这是因为,自动驾驶系统需要能够对其周围环境进行准确地感知和识别,才能够进行智能决策和安全驾驶。而在感知视觉系统中,图像处理技术是其中最为重要的一环。然而,为了能
2023-05-03631

- 浅谈随机振动试验6 试验中若干参数说明3 自由度等参数
2024-08-05

- 汽车立柱及门槛饰板检测
2024-10-22

