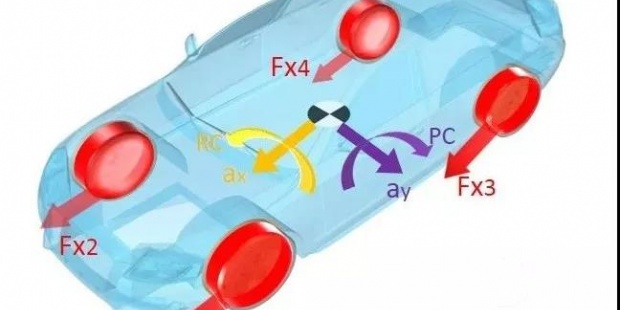
- 分布式驱动电动汽车动力学控制
2018-07-25
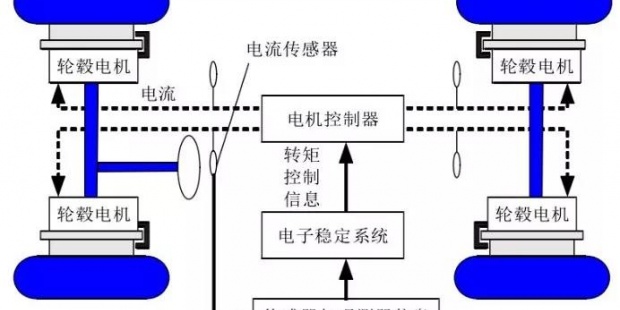
- 分布式电驱动系统构型分析
2018-07-25

- Arbe Robotics选用Synopsys IP实现其高分辨率成像雷达
2018-07-25
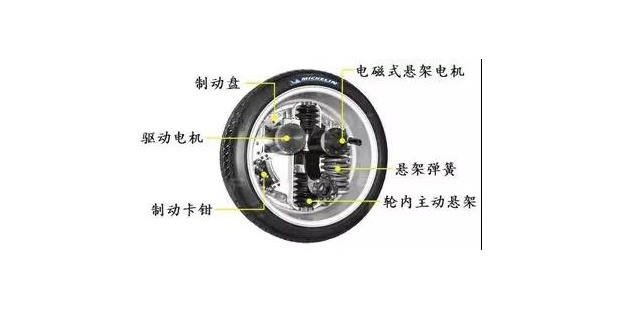
- 电磁馈能式主动悬架概述及研究开发
2018-07-25

- 一种新型车身用密封胶的应用研究
2018-07-26

- Efinix® 扩大执行领导团队和董事会
2018-07-26
- 动力总成悬置系统道路模拟耐久试验开发完成
2018-07-26

- CCRT气味舒适性评价
2018-07-26

- 壳牌推出“星舰”节能八级概念卡车
2018-07-26
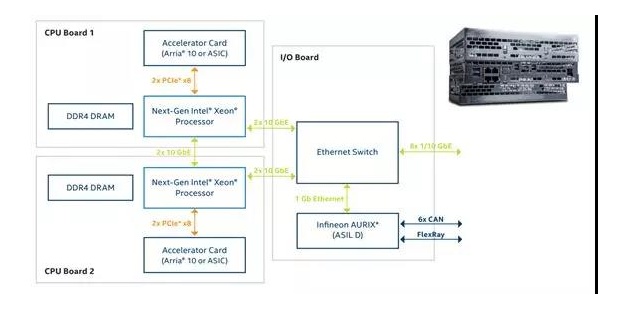
- Waymo背后的巨人:英特尔提供计算平台
2018-07-26

- 汽车安全的排头兵:保险杠
2018-07-26

- 2018版C-NCAP碰撞试验标准正式发布 新能源车也要接受考核!
2018-07-26
- 如何通过优化声学包来降低汽车的噪声?
2018-07-26
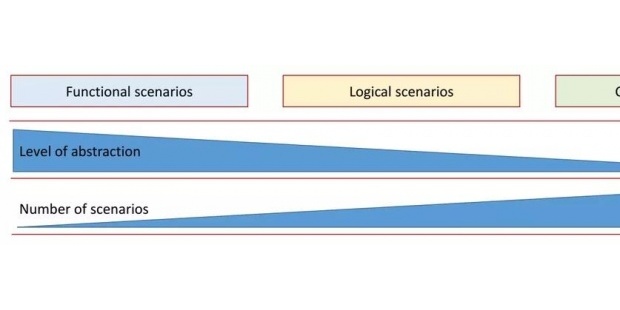
- 用于自动驾驶汽车开发、测试与验证的场景
2018-07-26

- 基于Attentive-GAN的单幅图像雨滴去除
2018-07-26
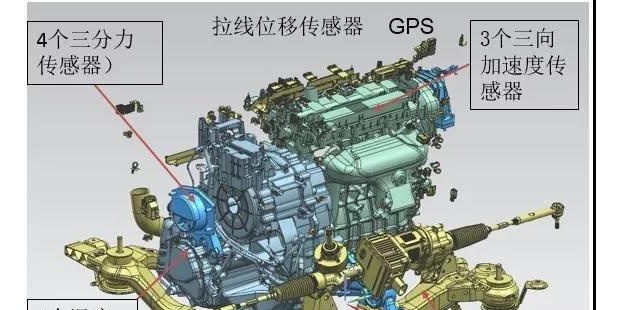
- 基于六自由度IMU和动力学的车身姿态和侧向速度估计方法
2018-07-26
- 同济大学与华人运通成立“新能源动力联合实验室”
2018-07-26

- 集成式电子液压制动系统
2018-07-26
日本自动驾驶路测规范(1/3)
这个指南旨在通过规定在日本国内的公共道路(“道路交通法”(1960年第105号法律)第二条第一款第一项所规定的“道路”,以下同样适用)中实施运用自动驾驶系统(同时操控加速、转向、制动中的多种操作或者全部操作的系统)来驾驶汽车的实证测试时(以下简称“公路演示实验”,下同),从保证交通安全和顺畅的角度来看所需要注意的事项,达到为实施合理和安全的公共道路实证测试作出贡献的目的。
2018-07-261555
- 日本自动驾驶路测规范(2/3)
2018-07-26

