
- 为什么电动汽车都突破800公里续航了,还是无法消除里程焦虑?
2024-07-11
- R139法规对制动辅助系统BAS的要求及测试方法(下)
2024-11-13
规模化敏捷框架在ISO 26262标准下的应用
2025-07-23863

- P3集团成立汽车移动创新中心
2018-02-27

- 纯电动、混合动力车型为何将被强制加装噪音装置?静谧性太好也是错?
2018-05-07

- 内燃动力系统执行HIL测试的关键考虑因素
2018-11-07
- 汽车软件的中介者
2021-03-15
- 直播 | 是德科技:C-V2X技术趋势及测试挑战
2021-10-27

- 上海佐竹向上海交通大学江苏中关村研究院设备捐赠仪式隆重举行
2020-10-23
自动驾驶系统中感知视觉的发展与挑战
随着自动驾驶技术的不断发展,感知视觉系统已经成为了自动驾驶系统中最为重要的一环。这是因为,自动驾驶系统需要能够对其周围环境进行准确地感知和识别,才能够进行智能决策和安全驾驶。而在感知视觉系统中,图像处理技术是其中最为重要的一环。然而,为了能
2023-05-03862
直播|使用nCode GlyphWorks软件进行疲劳分析
2023-09-25862
- 中国汽研破局补能焦虑,提供充电桩产品高质量测评解决方案
2024-05-12
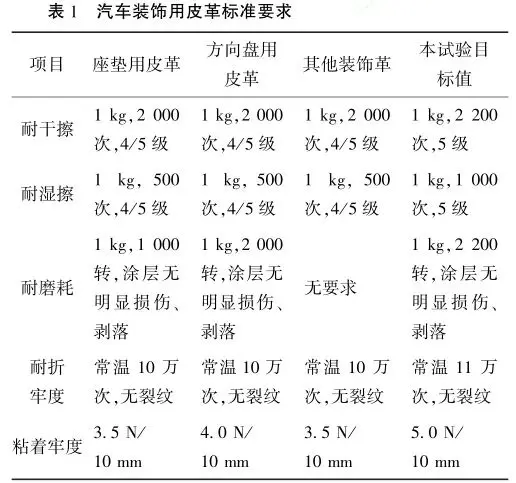
- 【皮革】基于响应曲面法的高物性汽车座垫革的涂饰工艺优化研究
2024-07-20

- 汽车零部件常见可靠性实验总结
2025-05-07
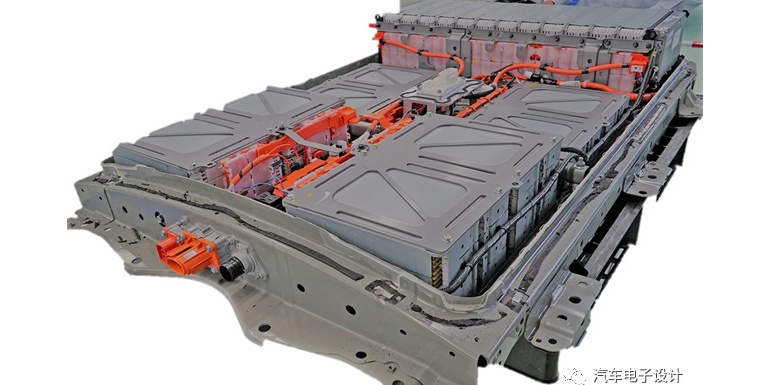
- LEAF电池模组演变
2019-04-27
汽车车内空气品质污染及其来源
01 影响汽车车内空气品质的因素是什么?影响汽车车内空气品质的因素很多,从空气品质的定义出发,可以分析出以下几个影响空气品质的因素:(1)车内气流组织,良
2021-07-09861
氢能源汽车关键技术分析
汽车排放造成的环境污染和石油资源枯竭正日益加剧,寻找清洁的替代能源,是每一个国家必须面临的问题。氢气来源广泛,可以通过太阳能、风能、核能等分解水获得;
2022-10-20861
又一研究院自主研发系统率先突破相关技术瓶颈
近期,由清华大学苏州汽车研究院自主研发、满足≥L3级自动驾驶需求的线控转向系统组件能够满足线控转向复杂场景的设计要求,取得重大技术突破。清华大学苏州汽车研究院自主研发的线控转向组件包括:转向执行器(RWA)与路感协同执行器(SFA)两部分控制组件。
2022-11-29861
基于实际工况场景的动力电池系统安全性、环境适应性和结构可靠性验证
2023-05-24861
One-Box线控液压制动系统的智能化特性
2023-05-29861

