
- 比亚迪明年推新铁锂电池:体积能量密度升50%,寿命120万公里,成本降30%
2019-08-23

- 汽车天窗平台化应用
2020-11-18

- 优化电池管理系统,提升电动汽车应用前景
2022-01-10
Model 3在25%偏置碰撞测试中的表现
汽车碰撞测试是车辆安全性能评估的重要标准之一,而IIHS的25%偏置碰撞测试则是目前要求最苛刻的试验之一。在这一试验中,车辆的结构耐撞性是决定车辆碰撞安全性能的关键因素。据悉,在这一测试中,Model 3表现出色,除了副驾驶25%小面积偏置碰撞时主驾驶侧小
2023-04-211051
大模型在自动驾驶中的应用
自动驾驶技术的发展面临着数据长尾问题。为了解决这一问题,自动驾驶公司开始使用大模型进行数据处理。本文将讨论大模型在自动驾驶中的应用,包括商汤的日日新大模型和毫末智行的DriveGPT雪湖•海若,以及小鹏汽车和斑马智行等公司使用阿里大模型的情况。本文
2023-04-221051

- 世界第四大公共汽车制造商ASHOK LEYLAND,采用达索系统方案加快研发速度
2019-04-12
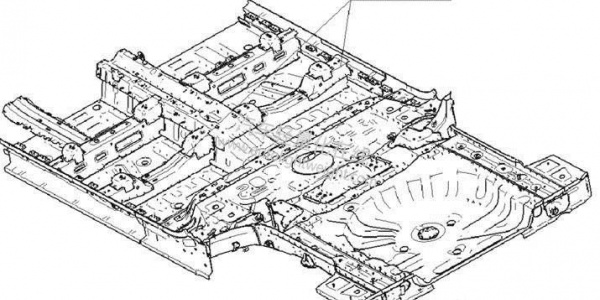
- 汽车座椅横梁轻量化设计方法研究
2021-03-04
- 采用单级减速器和两挡变速器的纯电动汽车性能对比研究
2021-10-11

- 大数据处理在汽车行业的应用
2021-11-06
浅谈虚拟标定技术在热管理控制系统开发中的应用
作者:极氪软件及电子中心文龙当前乘用车市场普遍向电动化、智能化发展。伴随着电气化、智能化,汽车热管理系统越来越复杂,对汽车安全、智能、 舒适、节能的影响越来越大,热管理已经成为新能源智能汽车上最重要的系统之一。在智能体验的新趋势下,传统的热
2022-11-161049
智能驾驶技术趋势:车企转向“轻地图,重感知”
2023-07-091048
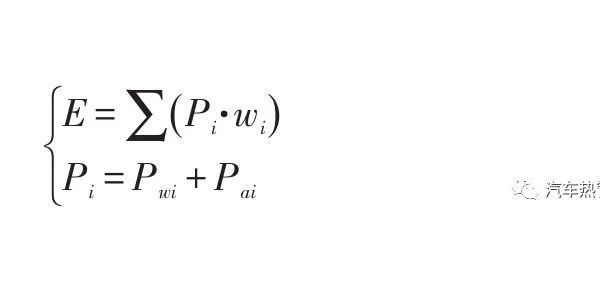
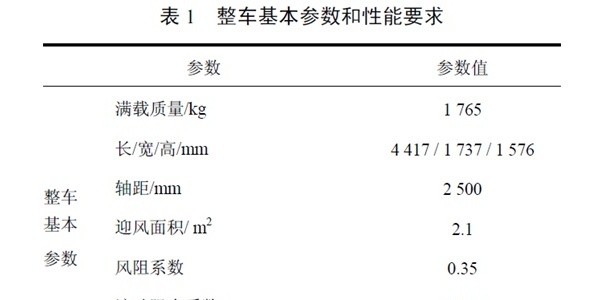
- 基于整车行驶工况的热管理系统综合评价体系研究
2022-02-12
现代车辆电子/电气架构的新方法
数字化为未来的移动性开启了新功能和服务世界的大门。但这也成倍增加了必须处理的信息和数据量。当前的E / E体系结构已经接近极限。汽车大趋势,例如自动驾驶,
2021-02-101047

- 磷酸铁锂动力锂电池为什么会失效
2021-06-05
基于激光雷达和高精地图的无人车自定位研究
本文首发《汽车测试报告》,由作者授权发布摘要:人工智能领域的飞速发展带动了无人驾驶技术的不断进步,无人车实现实时定位可以方便其进行路径规划和避障。该文提出了一种激光雷达与高精地图相融合,并利用NDT点云配准算法实现无人车自定位的方案。该方案在
2023-02-251047
自动驾驶行业的数据公开与大模型发展
自动驾驶技术作为智能化的一部分,需要依赖海量的数据来支撑其发展。然而,目前自动驾驶行业中的数据来源单一、完备性不足,这限制了自动驾驶行业的大模型的发展。与此同时,互联网的发展已经证明了数据公开的价值,自动驾驶行业也需要学习互联网的经验,将数
2023-04-221047
将“不安全”场景转化为“安全”场景
VICAD除了可以将自动驾驶“未知”场景转化为“已知”场景,还可以综合运用车路协同感知、决策规划和控制等技术,进一步实现将“不安全”场景转化为“安全”场景,提高自动驾驶安全性。如表3.6所示,自动驾驶“不安全”场景主要可以分为三类:1)交互博弈类场
2022-12-241046
CTP技术集成三元电池pack提升能量密度和体积利用率
随着电动汽车的普及,电池技术的发展越来越受到关注。三元电池因其高能量密度、高安全性等特点,成为了电动汽车主要的能量来源。而通过CTP技术将三元电池集成成一个pack,更是能够大大提高电池的能量密度和体积利用率,进一步推动电动汽车的发展。CTP(Cell-t
2023-04-181046
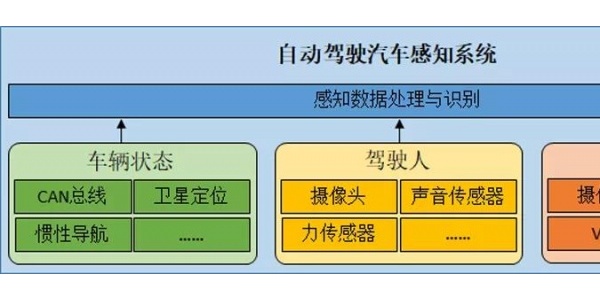
- 自动驾驶技术解读 | 自动驾驶汽车交通环境感知
2019-08-29
- 燃料电池发动机系统产业的专利分析
2020-06-22

