- TDK应用注释:可提高数字驾驶室安全性的设备
2019-12-04

- 腾讯新增多项专利,涵盖自动驾驶以及碰撞预警等
2020-08-29
汽车软件开发标准,将走向何方?
汽车行业的软件开发标准,最著名的应该是V模型。以V模型为代表的有ASPICE、 ISO 26262 和 ISO/SAE 21434。今天我们主要以ASPICE为基础,探讨V模型在当前汽车软件变革时代的特点。传统的V模型标准在当前这个阶段,有点使不上劲儿。这个要怎么理解呢?首先我们
2022-12-26552
干货丨燃料电池汽车能量管理边界研究方法
2023-12-01552
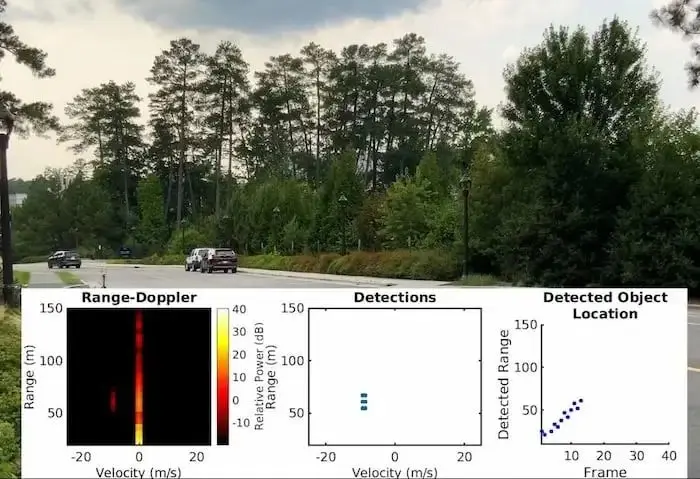
- 杜克大学的MadRadar攻击导致汽车雷达“幻觉”
2024-03-06
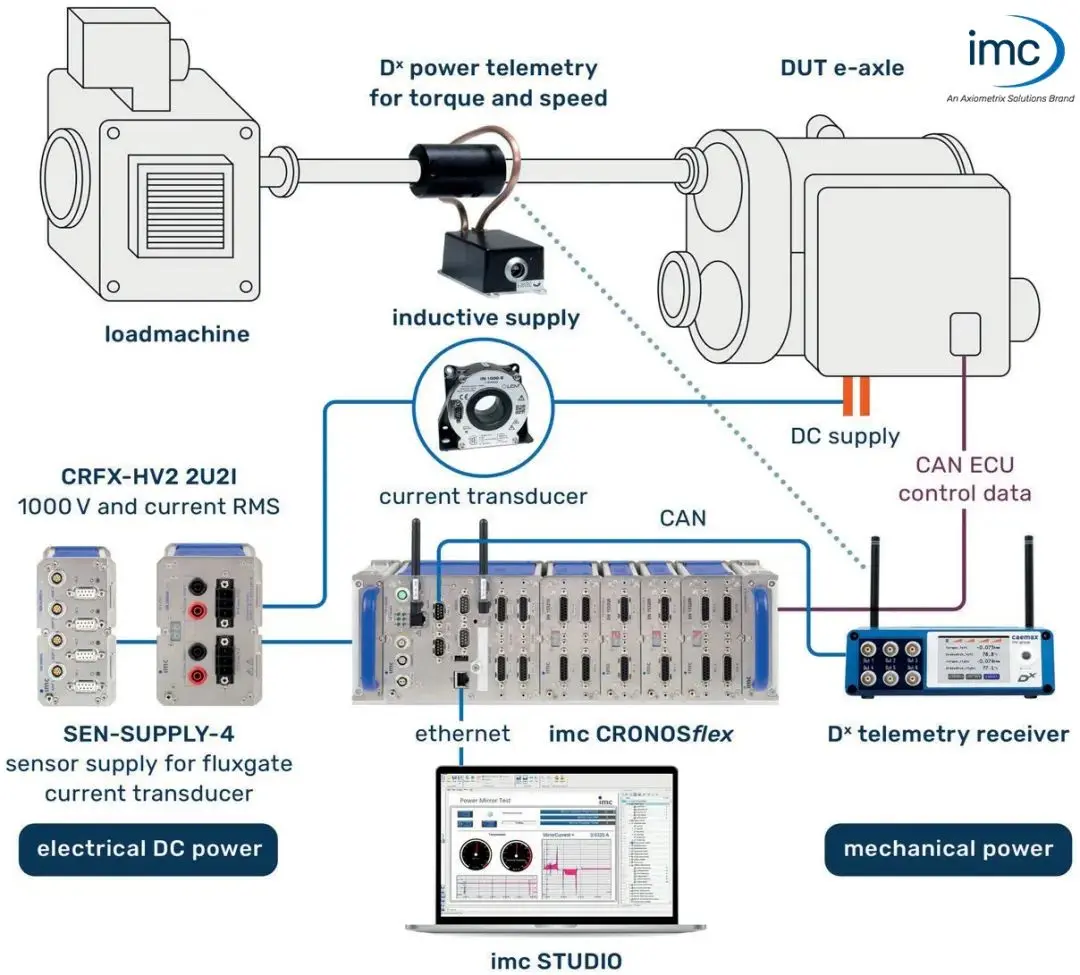
- 如何计算E-Axle电驱系统效率?
2024-04-10
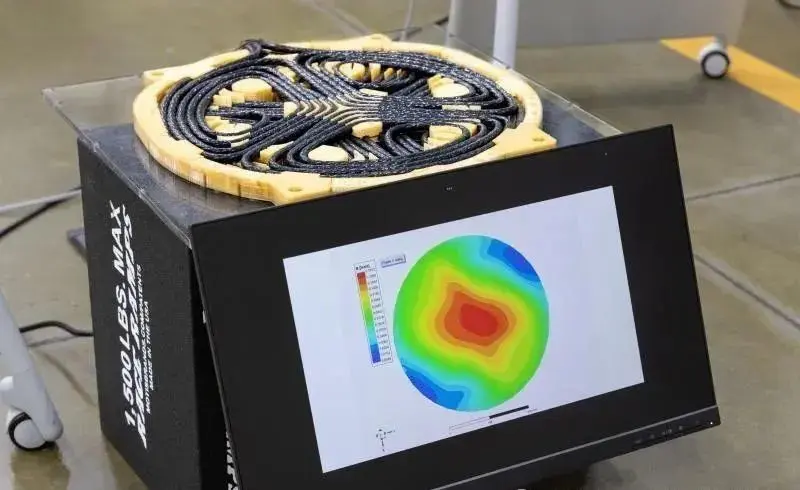
- 电动汽车无线充电技术实现重大突破!最高100千瓦效率达96%
2024-05-30
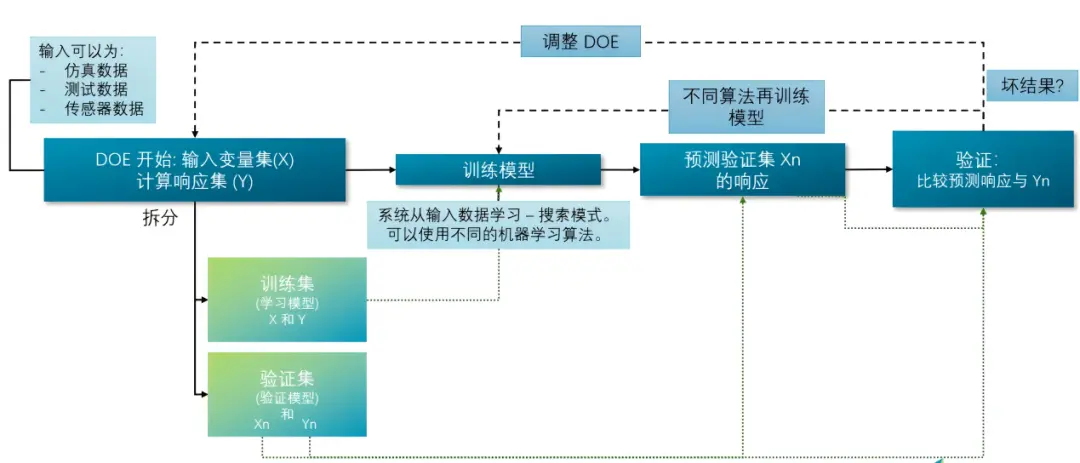
- 设计仿真 | 基于ODYSSEE人工智能CDC模型集成的整车动力学仿真
2025-06-06

- ZalaZONE proving ground
2020-03-08
汽车 SOA 开发者平台:星河智联
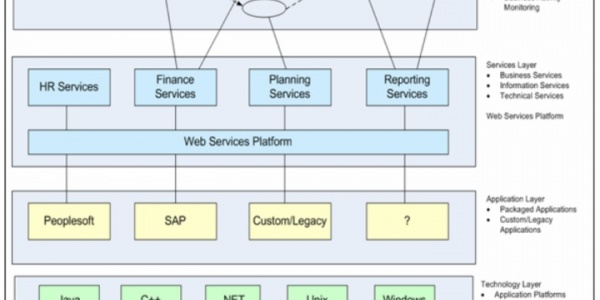
SOA 服务冲突策略设计实践星河智联:星河智联在软件定义汽车开发领域,提供智能化场景服务的开发及运行平台,以快速满足用户场景化、个性化和常用常新需求,平台通过智能场景推荐建设,实现车端信号可接入,实现场景的原子化,可组合形成复杂场景。对于生态服
2022-11-12551
- OEM开发流程管理与SOA的设计方法原理与实践
2022-02-10
新能源汽车环仿真测试的技术方案及应用
2023-07-13551

- R48对驾驶员辅助投影DAP的要求
2025-02-11

- Smart Eye展示下一代眼球追踪技术 可通过面部表情判断驾驶员情绪
2020-02-01

- 汽车智能化时代下的线束定制:如何精准匹配客户需求
2024-04-01

- 保时捷Macan与它的最佳快充温度分布
2024-06-10
- 边缘AI计算在自动驾驶汽车上的潜力
2021-09-18
下一代电机技术会采用什么材料和架构?
2023-11-07549
解析高速电机的六大关键技术
2023-11-13549

