狭窄环境下带有多拖车的牵引车轨迹规划的统一方法
编者按:牵引车-拖车系统由于其灵活的自由度、可拆卸性、灵活的自由度等原因而得到广泛的应用。随着无人驾驶技术的发展,牵引车-拖车系统的运动规划问题引起了重
2021-01-132481
- 车辆减阻流动控制技术简析
2019-12-25
ROS 2:自动驾驶系统开发框架
关于Apex.AI:是一家提供自动驾驶底层系统的公司Apex.AI成立于2017年,总部位于加利福尼亚帕洛阿尔托,创始人为Jan Becker和Dejan Pangercic,他们曾是为博世公
2020-04-032477
智能网联汽车先进驾驶辅助系统综述
2023-10-262477
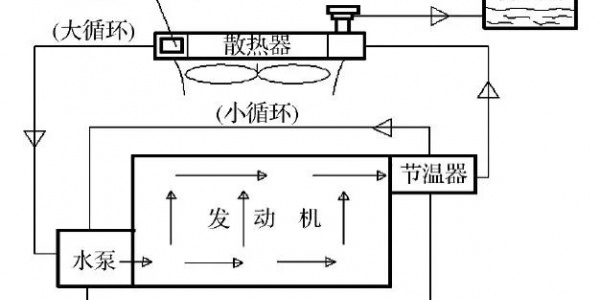
- Kuli发动机仿真
2020-05-14
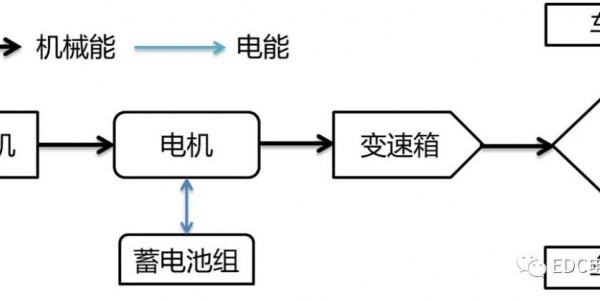
电动汽车的驱动系统布置方式综述
2023-07-092469
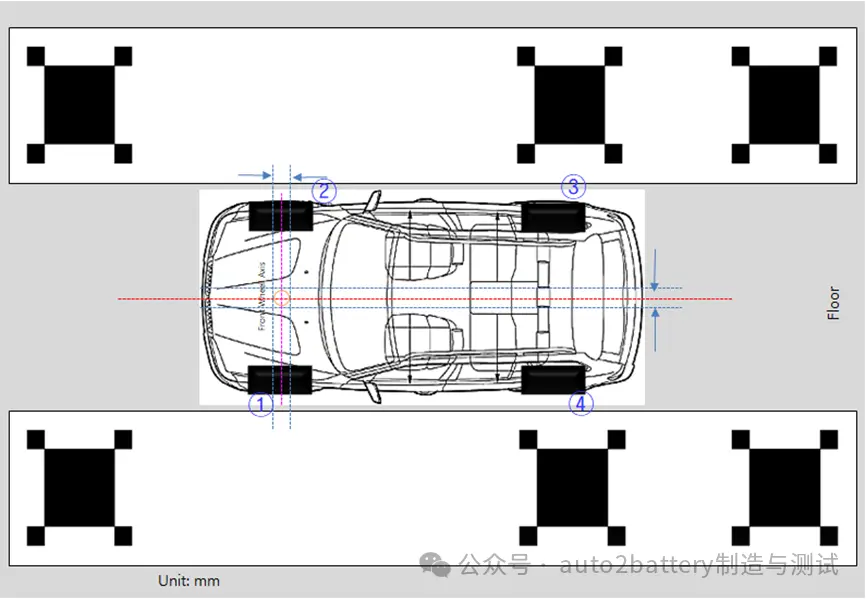
- 整车下线检测:AVM标定
2024-05-13
电驱桥关键技术——电驱桥布置形式和桥壳设计
2023-07-162467

- 用于座舱内感知系统的摄像头
2021-06-30
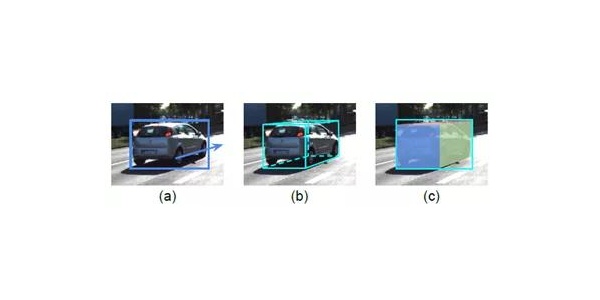
- GS3D:一种用于自动驾驶的高效3D物体检测框架
2019-10-08
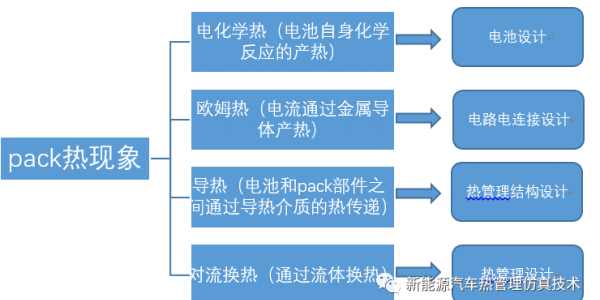
- 谈谈动力电池热管理设计
2022-04-10

- 谈谈整车控制器的功能
2022-05-30

- 东风汽车|电动汽车电池冷却系统对空调系统性能的影响
2020-03-07
Prescan与Amesim联合仿真(一)——坐标系定义
1.概述本系列教程主要目的为介绍SimcenterPrescan与Simcenter Amesim进行车辆动力学相关的联合仿真联合仿真时,需要对模型接口进行的修改,以正确完成模型闭环仿
2022-08-292459
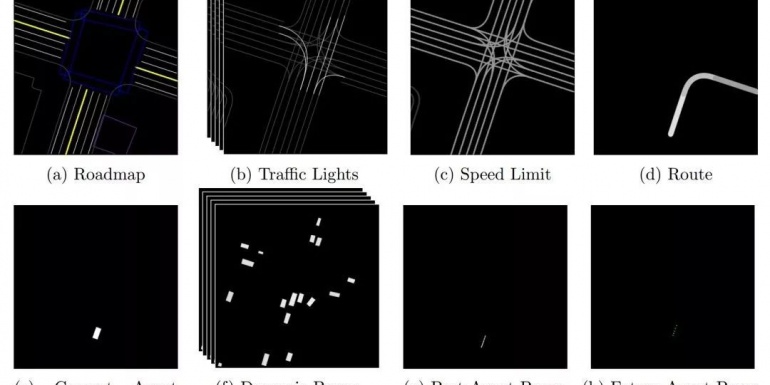
- 谷歌ChauffeurNet:训练能够鲁棒地驾驶实车的网络
2019-03-27
- 深度报告详解域控制器之L3汽车时代
2020-04-14

- 智能车多传感器信息融合及算法简介
2021-09-12
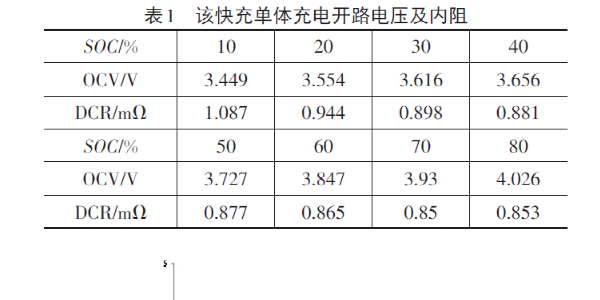
- 动力电池快充策略研究
2021-02-14
- 浅析丰田THS混合动力系统
2020-05-07

- 车载通信悄然变革 - CAN XL无缝对接Ethernet
2020-08-04

