
- UN R155法规适用范围将于2029年7月起扩展至L类车辆
2024-05-21
- 新能源汽车整车热管理标定方案
2024-05-21

- 涡旋式汽车空调压缩机怠速异响分析与控制
2024-05-21

- 计量夯基 向新而行 | 海克斯康2024“世界计量日”主题大会盛大举行
2024-05-21

- R101规定的电动车辆纯电续驶里程的测试方法
2024-05-21
直播|中汽中心 工程院:整车碰撞精准化仿真模型及研发工具应用
2024-05-21507
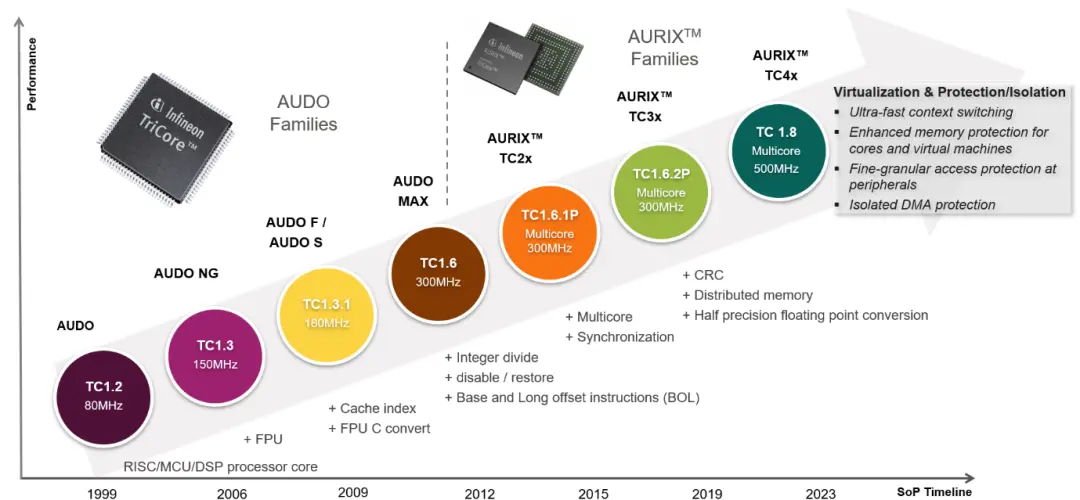
- AURIX™ TC4x虚拟化技术助力下一代汽车EE架构设计
2024-05-22

- 智能网联汽车仿真测试标准体系研究
2024-05-22


- 自动驾驶卡车实现商业化,斯堪尼亚开放矿运自动驾驶卡车订单
2024-05-22

- AP&GRAS支持高校大规模科研设备更新—教育新时代,科研装备大焕新
2024-05-22

- 沃尔沃推出首款可量产的自动驾驶卡车
2024-05-22
- 共探测试升级之路,西门子交通、ADI等亮相NI Connect秀案例
2024-05-22

- 加速HMI开发,VI-grade & VARJO强强联合
2024-05-22
- 金属疲劳典型案例与分析技术发展
2024-05-22
- 影响金属材料疲劳强度的8大因素
2024-05-22
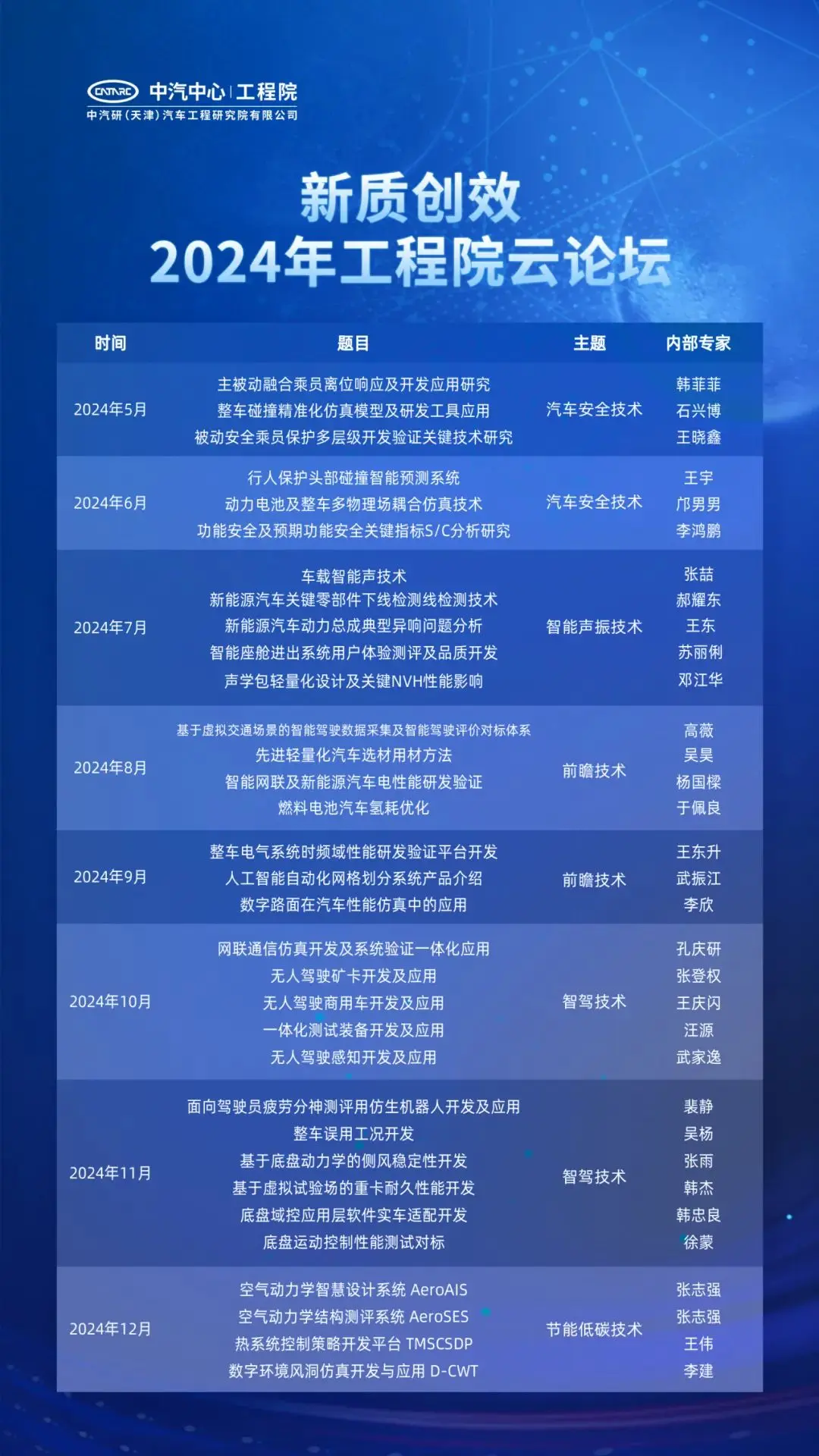
- 新质创效!2024年工程院云论坛暨汽车安全主题云论坛预告!
2024-05-22

- 吉林·安徽合作发展交流座谈会召开 中国一汽与科大讯飞、蔚来战略合作签约
2024-05-22

- 中国一汽与科大讯飞签署战略合作框架协议
2024-05-22

- 中国一汽与蔚来签署战略合作框架协议
2024-05-22

