
- 使用 Cradle CFD 对车载储供氢系统进行氢气泄漏与扩散研究
2024-06-15
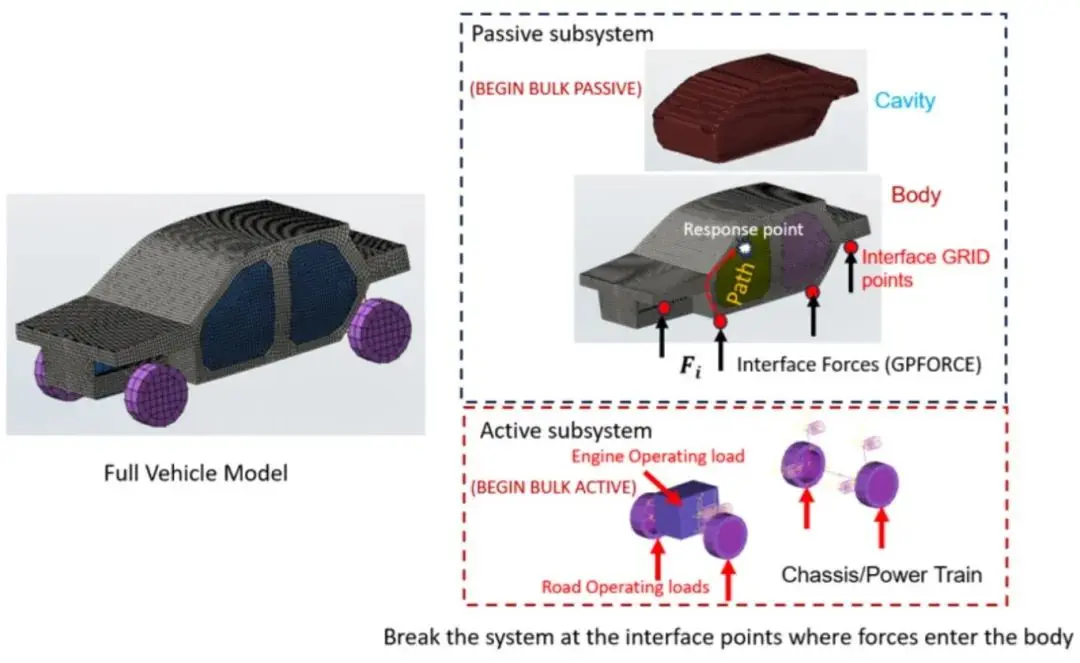
- MSC Nastran 新增功能:一步法传递路径分析及后处理
2024-06-15

- 高压电池的充放电测试
2024-06-15

- 新能源汽车测试之方案篇——模型动态验证工具MV
2024-06-15

- 车企的官宣油耗和里程是怎么来的?
2024-06-16

- eVTOL博士之杂坛06_检测行业的“前世今生”?
2024-06-16
联合国法规R47对轻便摩托车气体污染物排放的工程化约束
2026-03-01262
车联网:隐私保护与技术便利的平衡探索
2024-06-17443

- 新能源汽车用电动压缩机与电子膨胀阀匹配研究
2024-06-17
高度加速应力审计(HASA)在汽车产品寿命评估中的应用及优势
2024-06-17776
温湿度堆码试验在汽车可靠性综合环境测试中的应用
2024-06-17360
高压蒸煮试验在汽车密封性能及组件耐用性评估中的应用
2024-06-17513
环境温湿度测试在汽车包装材料性能评估中的应用
2024-06-17449
堆码测试在汽车包材及包装运输领域中的应用与挑战
2024-06-17530
包装抗压测试在汽车部件运输保护中的应用
2024-06-17490
联合国法规R48对车辆灯光安装与系统协同的工程化约束
2026-03-01420
联合国法规R49对重型车辆发动机污染物与颗粒物排放的工程化约束
2026-03-01867
联合国法规R50对摩托车灯光与光信号装置的工程化约束
2026-03-02296

- 高压环境下台架和整车安全可靠测试
2024-06-18

- 中国信通院第五批工业互联网平台服务安全能力评价报名启动
2024-06-18

