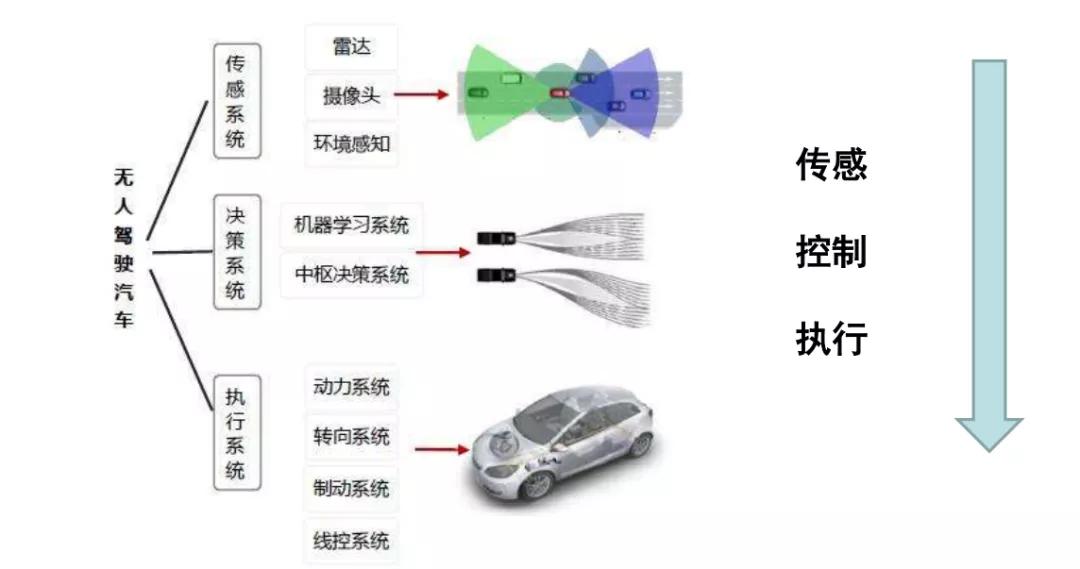
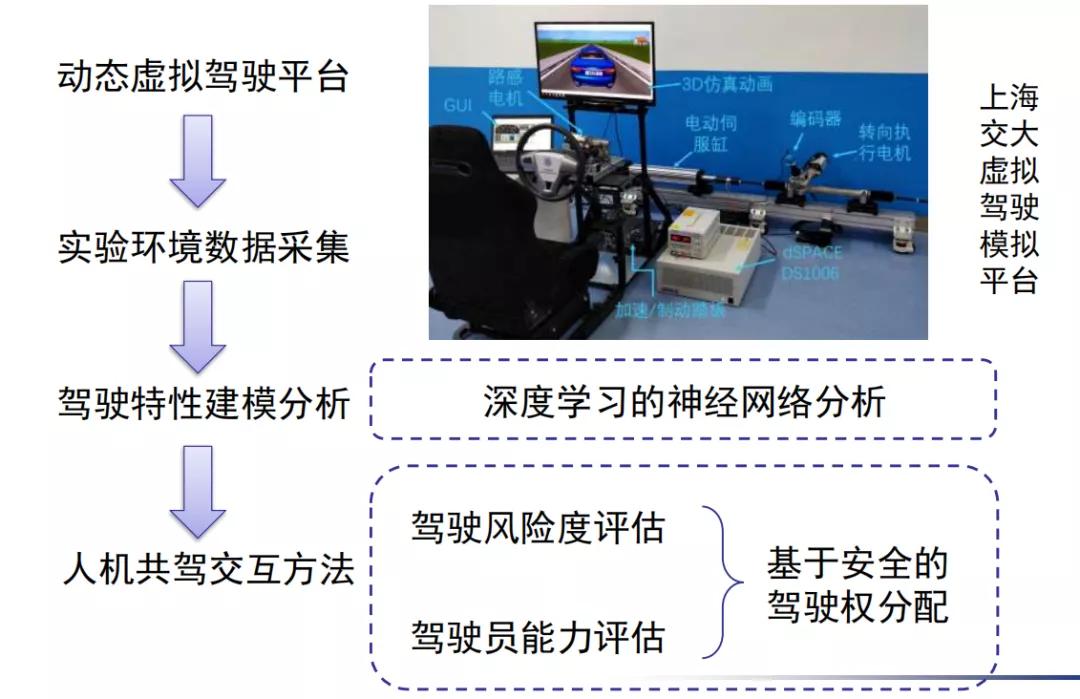
智能驾驶车辆功能实现的核心组成
汽车转向系统的发展
缺点
- 燃油经济性差
- 转向特性调整烦琐
- 转向系统与发动机相连, 当发动机熄火时不能提供 助力
电动助力转向(EPS)
优点
- 只在转向时电机才提供助力 ,可降低燃油消耗
- 转向助力由软件调整,能够 兼顾低速时转向轻便性和高 速时的操纵稳定性
- 结构紧凑,质量轻便 缺点
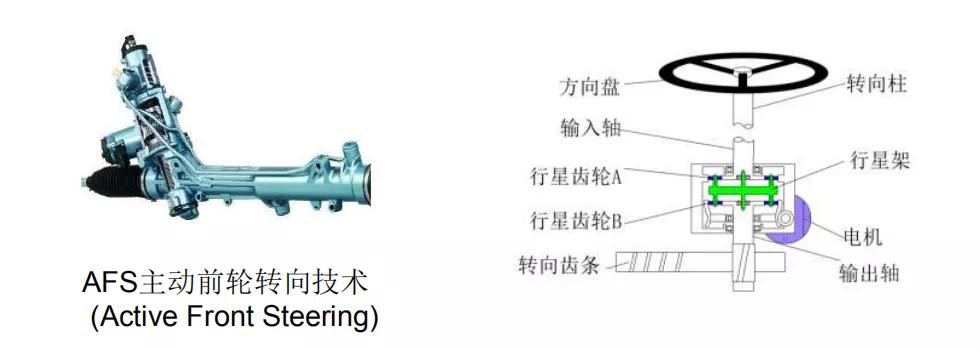
- 无法实现主动转向
线控转向(SBW)
优点
- 灵活传动比。
- 提高汽车操作的稳定性。
- 提高驾驶安全性。
- 节省资源便于维修。
- 满足了汽车电子转向技术的需求。
- 有利于系统集成控制。

大部门智能驾驶功能都直接和转向技术相关
自适应巡航(ACC)
自动紧急制动(AEB)
车道偏离预警(LDW)
车道保持辅助(LKA)
自动泊车辅助(APS)
自动换道辅助(LCA)
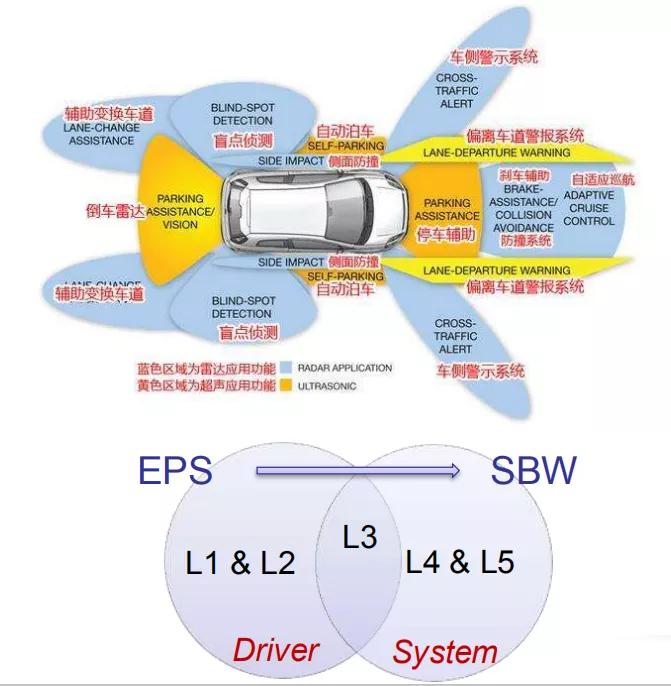

智能驾驶中的典型应用
提升驾驶安全性
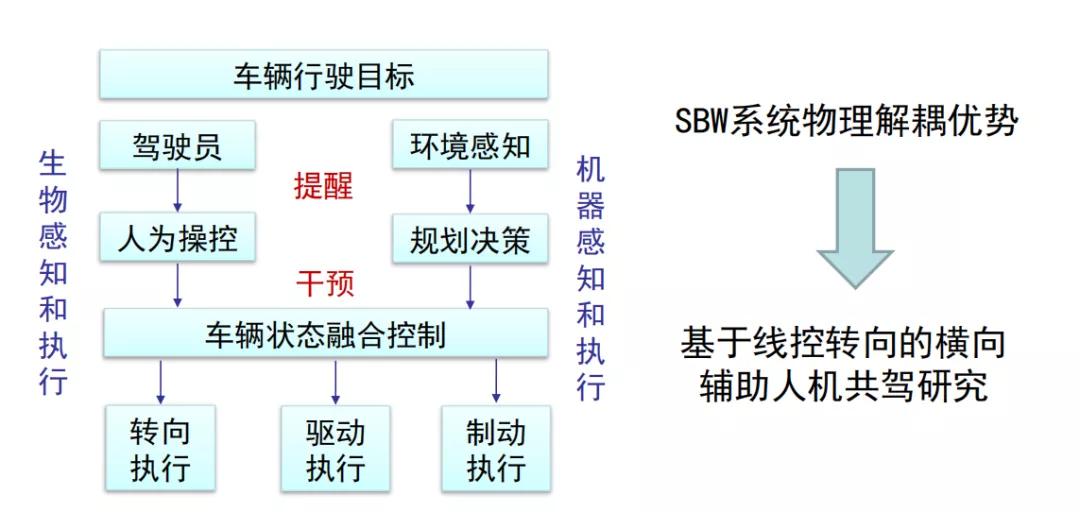
智能驾驶中的人机交互控制问题
- 智能车辆的驾驶安全性
- 智能驾驶中的人机交互控制问题--安全
- 人马共驾原理--人机共驾理论

关键问题:驾驶员和机器驶机理的差异性和冲突,需要研究驾驶员行为模 式的个性化物理表征,形成基于驾驶权分配机制的人机共驾交互理论
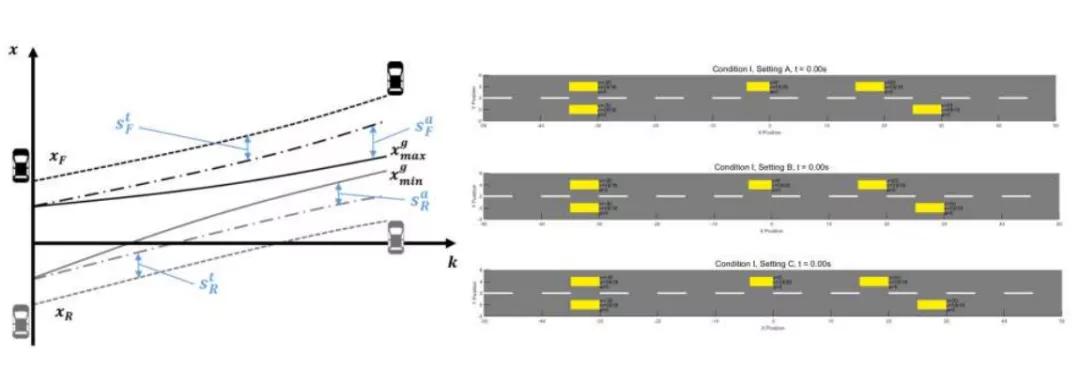
案例:基于行驶安全空间裕度的智能超车换道控制 通过变道域面积评估选择最佳换道切入空间,结合当前行驶姿态和目标 .
行驶姿态以及动力学限制,基于QP二次规划完成换道控制的横向和纵向路径规 划。结合对车辆未来行为能力的预估分析,实现最优的路径跟随控制。
智能车辆的驾驶舒适性
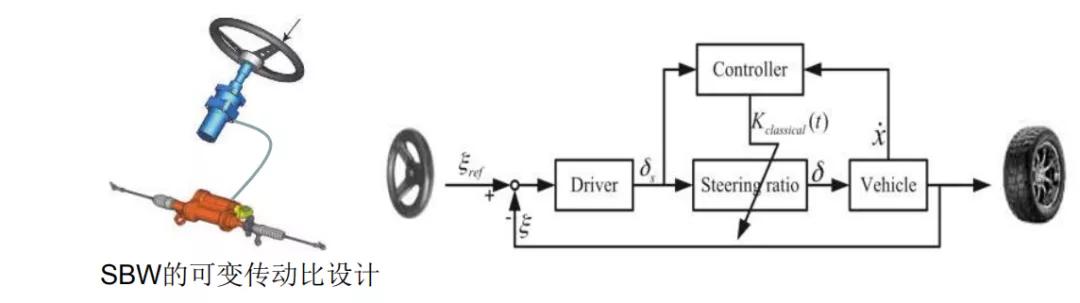
可变传动比技术:
• 实现低速转向轻便和高速转向稳定的可变传动比技术
•实现跟随驾驶员意图的车辆稳定性控制技术
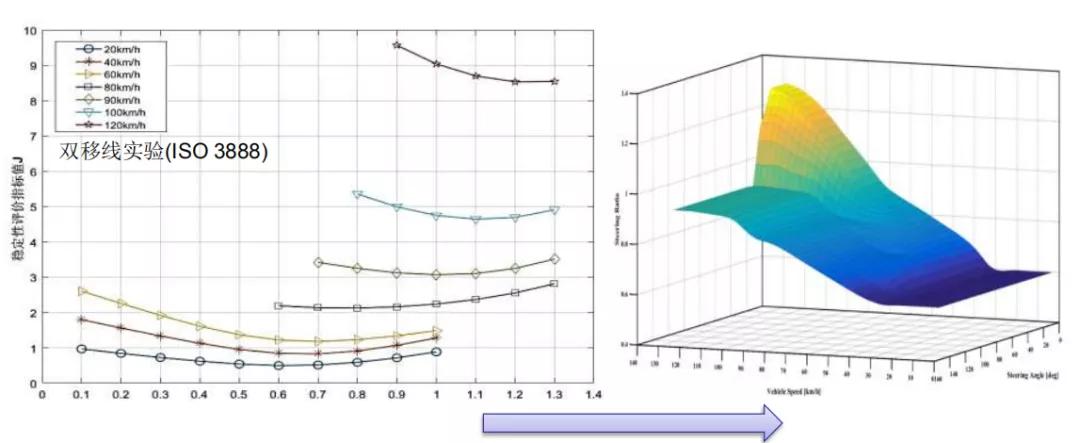
线控系统的动力学可变传递特性
发挥线控系统的物理解耦优势,实现转向特性的可变传递设计
可变传动比指标设计方法
由各单项指标的加权平均可得总优化函数J :
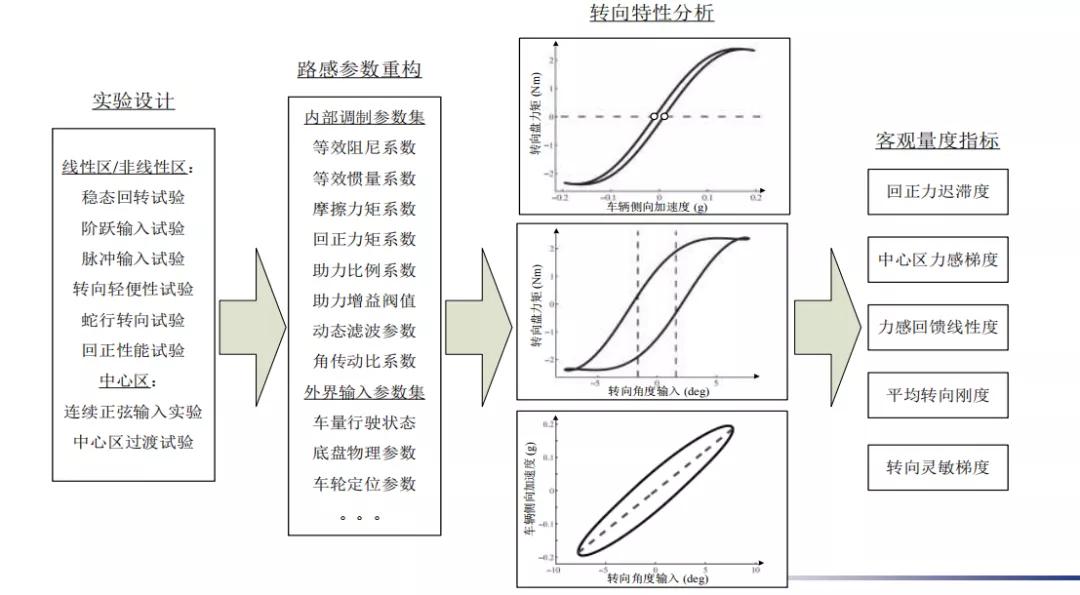
个性化的路感模拟设计方法
智能车辆的驾驶个性化
引入基于车辆操控稳定性指标进行更深入的客观评价分析,获得不同路感参数 设置和驾驶操纵特性的映射关系。
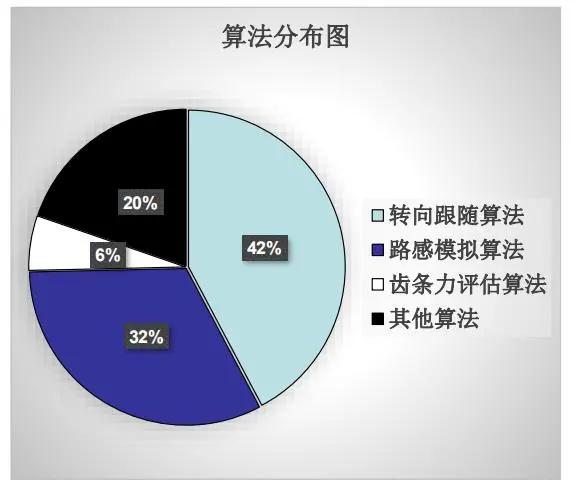
SBW系统模型及核心算法
线控转向系统研究目前还没有统一的成熟方案,通过文献调研分析 相关研究的核心是算法的设计:
• 正向--转角传递跟随控制
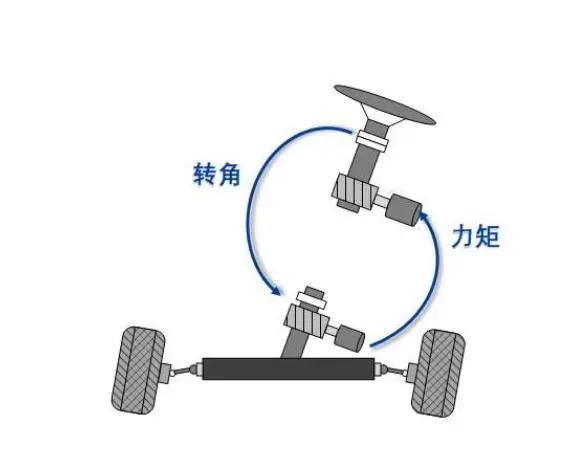
• 逆向--力感回馈模拟控制
线控转向指令跟随算法案例
要求转向轮迅速响应驾驶员的转向意图,解决在复杂未知路面、信号传递延 时等情况下如何保持转向实时性、精确性。

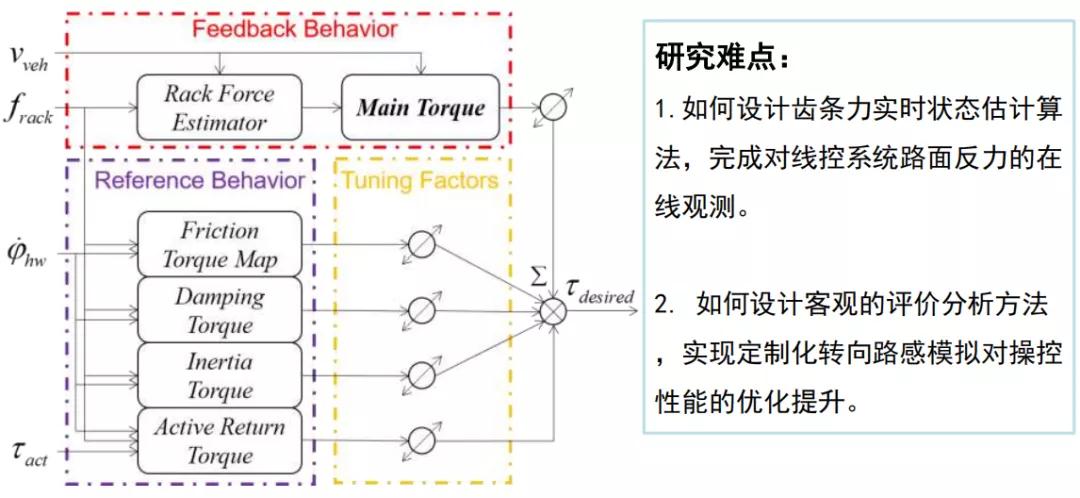
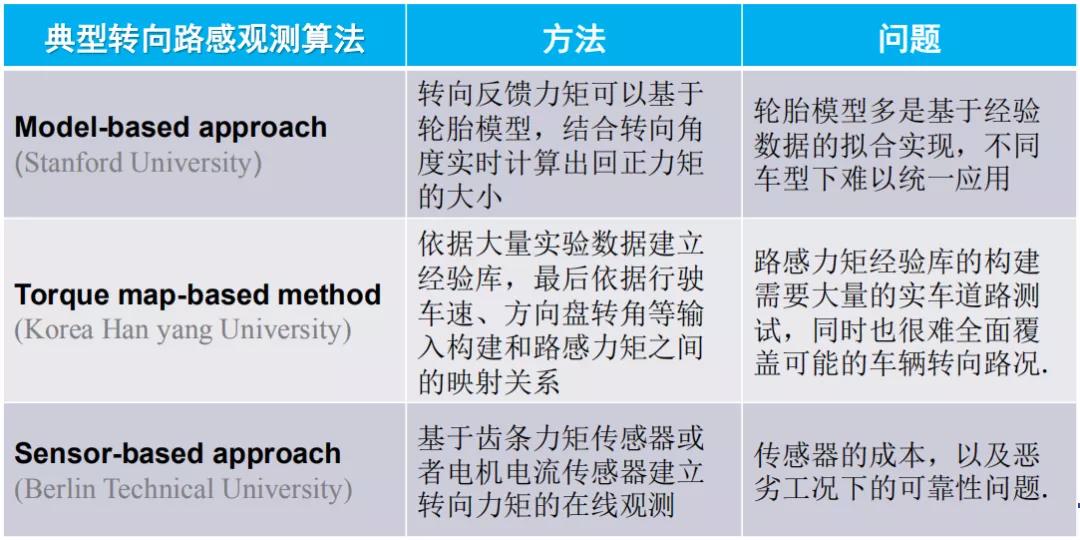
线控转向路感反馈算法案例
线控系统没有机械连接,需要通过电机模拟实际的路感反馈给驾驶员,遥操 作过程中路面反力的在线观测一直是研究的难点
系统模型设计方案
方向盘模块系统动力学模型

转向执行系统动力学模型


总结和展望
- By-wire线控系统的物理解耦优势提供更广阔的智能驾驶 操控可能,如何设计定义操控传递参数来优化车辆行驶 动力学特性具有巨大意义。
- 驾驶人和智能系统之间的协同共驾涉及行驶安全和驾驶舒适性,线控系统可以作为人机交互的重要桥梁。
- 为了更加高级的智能驾驶系统需要转向系统和制动系统的协调工作,转向和制动行业会出现兼并重组

来源:ATC汽车底盘
作者:吴晓东











