综合来讲
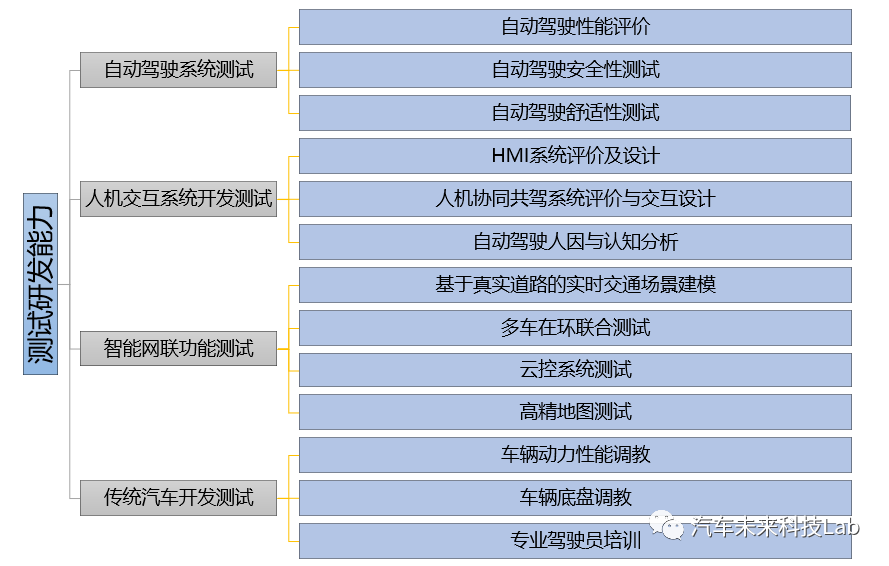
传统汽车领域:往往利用该系统进行车辆性能的定义、标定和调教,尤其是底盘调教、车辆动力学系统的主观评价,目前很多零部件厂家已经利用DIL系统开展转向、制动系统的硬件在环开发设计。随着车辆动力学模型的不断精确与完善,轮胎模型的开发也大量的应用;
工业设计领域:往往利用该系统进行整车人机交互系统(HMI)、后装设备(如HUD、娱乐系统等)的测试,这块主要偏向于主观评价,近年来也有很多高校和研究机构开展了车辆驾驶中的人因工程领域的研究,致力于人因分析研究和车内驾驶员主动安全设备的研发;

自动驾驶领域:DIL系统的价值主要对自动驾驶系统的功能安全和极限性能、人机交互(人机协同共驾)、人机工程(自动驾驶系统舒适性)等方面开展研究和评价,目前全球范围内应用较少,处于探索性阶段。由于自动驾驶的测试对于安全员(驾驶员)和测试环境的安全极具挑战,存在风险较大,同时场景的构建成本和测试成本也很高,所以DIL系统作为自动驾驶的验证是一个非常有技术柔性和商业价值的开发测试平台。图片

1、数字孪生与映射
从本质上讲,DIL系统的构建是一项逆向跟踪过程,通过实时模型将真实物理系统进行最大程度的还原,通过对本构模型的剖析或者观测进行分解和建模,无论是通过物理模型还是经验模型的手段都以真实接近作为终极目标进行构造。在此我们可以把这项工作总结为:映射,这也是一项数字孪生的工作。
映射的方式大致分为两种:虚拟模型、实物在环。顾名思义,虚拟模型的映射是一种建立在认知程度上还原,仿真的还原度也取决于模型的水平。虚拟仿真大致也可以分为两种方式:1、基于本构原理的建模;2、基于经验或观测的建模,当然也有半经验模型。简单的理解,第一种是我们对于被在环系统高度认知后的建模,模型本身是反馈了系统本身的物理规律,模型也具有更好的柔性和可编辑性能,例如:车辆动力学模型,我们可以直接构建函数进行描述;第二种是我们难以对模型本身的物理规律进行解析,不能科学化的建立准确的物理模型,抑或其本身是不易求解的非线性系统,例如:发动机的噪音模拟,往往我们要进行实际的采集建立和发动机工况的映射关系,而难以用函数来表达。
2、场景重构与泛化
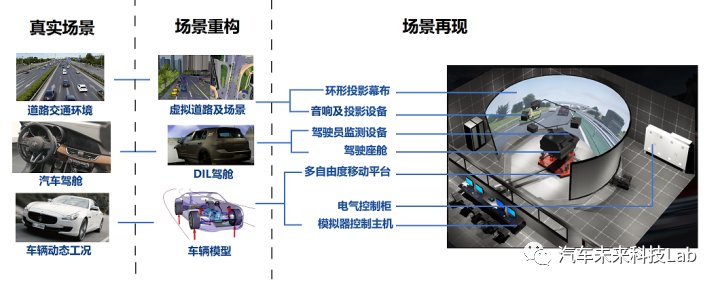
场景重构是一个多仿真系统的协同工作,也是评价一个DIL系统集成和标定策略的核心。在设计过程中,我们重构的是一个过程,就像一个电影片段,要考虑到场景中的所有交互因素。比如:车辆模型的匹配会对真实驾驶的体感带来影响,在整车定义和设计方案验证方面车辆模型的精确度尤为重要;环境画面的真实度和视觉效果对于驾驶员进行判断和操控影响很大,甚至是声效的真实性、声源的位置,在人机交互评价中这些感官通道模拟工作的精确度是实验开展的前提。
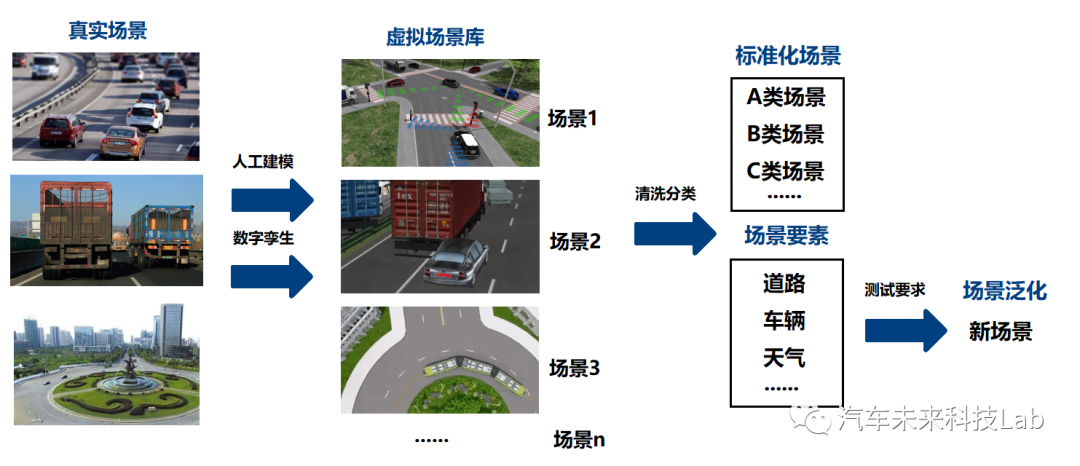
测试场景对于驾驶员在环系统更像电影是剧本一样,是驱动一个实验的素材和资源,场景的质量直接影响测试工作的效率和准确度。尤其在自动驾驶领域,场景是海量的也是无边界的,这对于测试来讲进行场景的筛选和设计很有价值。我们采集的场景数量是有限的,类别也是有限的,但通过已有的场景库进行元素的拆解和组合,就可以形成新的场景,一定条件(AI)的泛化出我们需要的测试场景,这也是未来测试的一个方向。
3、有效域与交互边界
在利用模拟器进行研发和测试时,对于模拟器本身性能和特性的理解是前提,要认知现有的系统能仿真哪些,能仿真到什么程度,有哪些是和真实不同的。必须将驾驶员与模拟器,模拟器与真实车辆之间的映射关系从主观和客观方面深度理解,找出模拟器的有效域,在有效域范围内进行实验方案的设计和验证,这样也能最大程度的对于模拟器本身仿真失真的规避。尤其在HMI和车辆动态调教领域的研究,考虑到这个因素的虚实差异。
物理极限:模拟器因受限于空间和硬件而存在物理极限,物理极限的形成条件受多参数的关联限制,例如运动平台x、y、z、yaw、pitch、roll六个自由度的行程以及加速度。理论上讲,行程是一个有界参数,是无法完全覆盖真实车辆的运动工况域的,加速度可以是一个完全等效参数,可以覆盖车辆的全工况。例如,目前高性能的多自由度运动平台已经可以达到2g以上的水平加速度和3g以上的垂向加速度,几乎可以覆盖各种性能汽车安全行驶的所有工况。同时,加速度与行程的关系可以用维持时间来约束和平衡。另外,频率的带宽也是另一个维度的物理性能,这一指标不仅对于运动的低频机动性有影响,甚至还能关乎模拟器是不是能达到一定程度的舒适性评价的功能,包括一部分HVH的性能。然后,在物理性能域中行进最大保真度的动态效果还原,就是模拟器动态标定水平最重要的一步:motion cueing,这是集成和调试工作中的难点,因为模拟器不可能完全和真实动态效果一致,存在”一定程度还原“和”欺骗“的因素,比如给真实加速度打个折扣,或者通过座椅的背部气囊来模拟加速推背感。
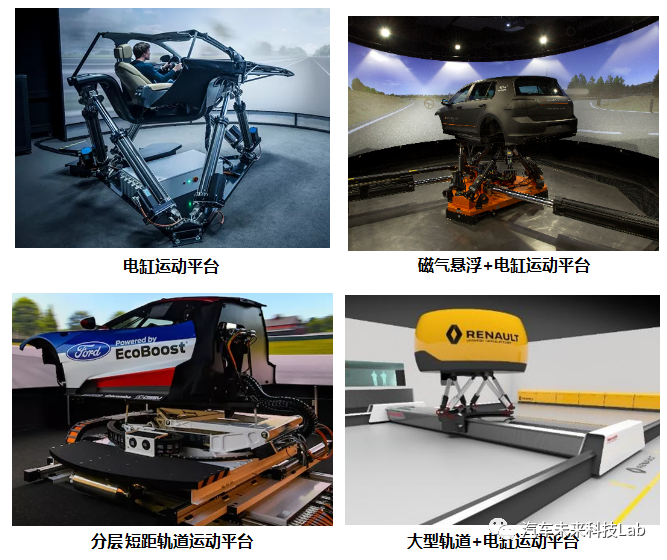
高性能运动平台方案: 目前全球范围内有研发商用级别的高性能动态模拟器主流有以下图中几种,当然不能覆盖所有的技术方案。电缸驱动的运动平台作为主流的中低频端驱动平台,可单独作为运动平台,亦可与其他运动平台做叠加和耦合。由于其水平方向的运动行程有限,高端的中大型模拟器往往会再耦合一个低频的水平运动平台,这个平台负责x、y方向的运动以及水平面的转动的补偿,这部分目前主流有两种方案,磁气悬浮和长距轨道式,轨道式的理论讲是无空间边界,可以做到很大的尺寸。分层短距式也是一种更加有效利用空间的中型运动平台方案,响应速度非常快。当然,更新的还有绳锁和轮式平台的方案,目前应用很少。
4、探究与创新
驾驶模拟器作为整车虚拟开发的平台,或是方法,不仅能加快研发周期、加快设计迭代速度,也使得实时调教、危险场景测试、海量高速测试等等传统路测难易实现的事情变的简单,甚至是超现实场景的构建。模拟器真正的价值也越来越凸显:对现实和未来重构、设计与创新。
来源:汽车未来科技Lab
作者:冯泇铖




