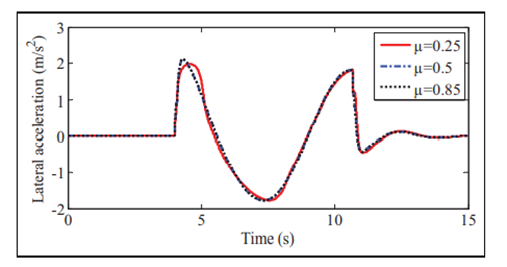
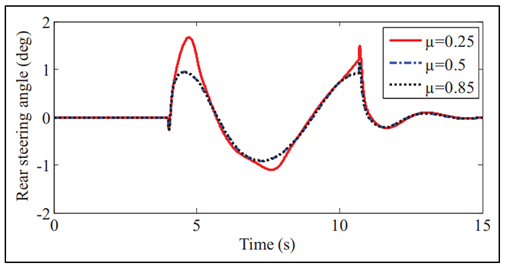
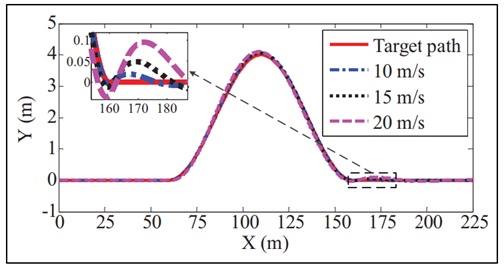
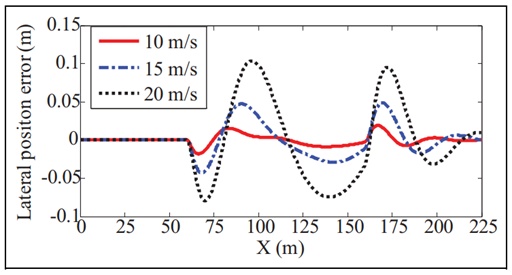
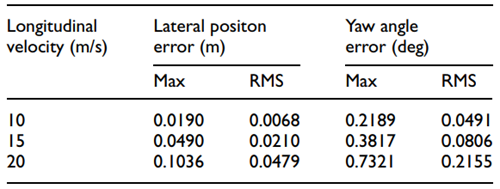
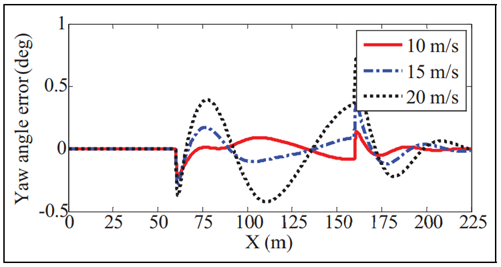
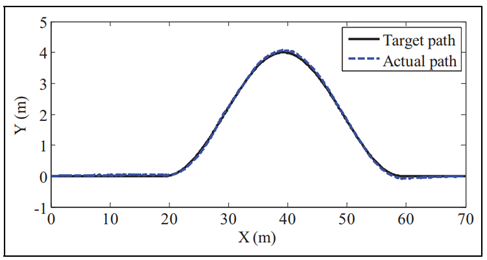
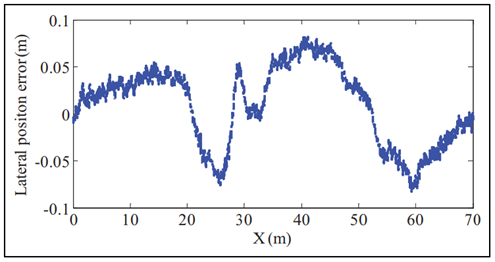
不同摩擦系数路面的路径跟踪结果如图6所示。可以发现,即使在冰面上,路径跟踪误差也很小。详细分析了跟踪误差。横向位置误差和偏航角误差如图7和图8所示。此外,表2中列出了最大值和均方值(RMS)。可以看出,结冰道路上横向位置误差的最大值和RMS值为0.0711m和0.0272m。偏航角误差值的最大值和RMS为0.5021和0.1231。这表明,所设计的控制器具有良好的路径跟踪和抗参数扰动的鲁棒稳定性。







- 电动汽车高端公务产品平台:功能架构与性能实现路径
2026-03-29

- 城市运行产品平台
2026-03-28

- 高端公务产品平台
2026-03-28

- 极限运动产品平台
2026-03-28

- 电动汽车高端公务产品平台:系统架构特征与底盘能力构成
2026-03-28

- 电动汽车高端公务产品平台:性能需求的系统化表达
2026-03-28

- 电动汽车高端公务产品平台:定义、场景与车型边界
2026-03-27

- 漂移、赛道、弹射:智能底盘如何把极限变成“可控”?
2026-03-26

- 智能底盘如何重构极限驾驶边界:定义与性能本质
2026-03-24

- 瓦力大作战|轻科普——误码仪(BERT)架构及测试原理解析
2026-03-04


