1月7日上午,AIR DISCOVER青年科学家论坛第六期在清华大学智能产业研究院(AIR)图灵报告厅举行。本期活动荣幸地邀请到美国密歇根大学交通研究院助理研究科学家封硕博士,并由他为我们作关于Intelligent driving intelligence test for autonomous vehicles(自动驾驶汽车的智能加速测试)的报告。

讲者简介
封硕,清华大学本科、博士(导师为张毅教授),博士毕业后于美国密西根大学进行博士后研究(合作导师为Henry Liu教授),现任美国密西根大学交通研究院Assistant Research Scientist,从事智能无人系统测试与验证理论方法研究,先后在Nature Communications和IEEE Transactions系列汇刊等期刊发表论文数十篇。他曾获IEEE智能交通系统学会“最佳博士学位论文奖”(全球共三人入选)、美国运筹与管理协会“2021年度智能交通系统最佳论文奖”等荣誉。封博士还担任美国工程师学会道路自动驾驶测试与验证委员会委员、中国汽车工程学会《Automotive Innovation》期刊学术编辑,曾担任2021 IEEE IV和2021 ICML等多次国际会议workshop组织者。
报告内容
过去的一百年间,交通领域经历了数次大变革。在该领域中,当下最热门的变革当属自动驾驶汽车。然而,自动驾驶汽车也面临着巨大的技术挑战:一是罕见事件需要指数数量的数据来训练和验证,二是罕见事件仍然包括生与死的情况,也就是说目前自动驾驶还并不安全。为了使自动驾驶汽车水平能够达到安全范围,我们往往需要累积几千亿英里、甚至万亿级别的测试里程,才能够对其进行有效验证。因此,针对自动驾驶汽车安全性能测试中效率低下的难题,封硕博士等提出了一种自动驾驶汽车智能驾驶智能测试方法:该方法基于大数据,构建了一个名为NADE的、具有“无偏性”和“挑战性”的自动驾驶系统测试评价环境。
本期讲座,封硕博士针对这一方法常见的三个问题,作了详细解答:如何测试一个基于人工智能的驾驶系统?传统方法有怎样的问题?NADE与传统方法相比有何优势?
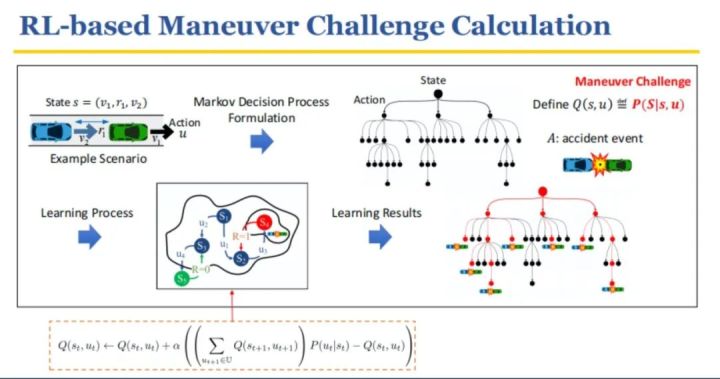
一、如何测试一个基于人工智能的驾驶系统?
封硕博士介绍到,对于如何测试和评估自动驾驶汽车,目前还没有达成共识或标准程序。基于人工智能的代理驾驶,对于外部用户来说通常是一个黑盒子,它限制了传统的基于逻辑的软件验证和验证技术的使用。现有的自动驾驶汽车测试使用的最先进的方法是代理-环境框架,采取软件模拟、封闭轨道测试和道路测试相结合的方式。
二、利用传统方法进行自动驾驶测试工作有何问题
理想情况下,我们可以用一个矩阵
来源:清华大学智能产业研究院
评论 0

同类信息

- 瓦力大作战|轻科普——误码仪(BERT)架构及测试原理解析
2026-03-04

- 为什么 HUD 合规真正“卡人”的不是参数,而是证据链
2026-02-10

- 辅助驾驶撞扛树枝老人、撞环卫工人是预期功能安全应该覆盖的事故么?
2026-02-10

- 大推力直驱技术助力EPS安全测试,为你的安全出行 “保驾护航”
2026-01-20

- 单机体积,双倍效能!激光切割机玩转“降本增效”
2026-01-20

- 同步难?空间挤?这款双出轴电机,是你双十二的“必囤”硬核好物
2026-01-20

- 即刻探索8台机器人如何解放数百名工人!
2026-01-20

- 考虑驱动单元性能变化的分布式驱动智能车辆强化学习增强运动控制
2026-01-16

- eVTOL/飞行汽车→低噪声气动设计与主动降噪控制策略1/3
2025-12-30

- 比亚迪车辆避撞专利公布
2025-12-26


