在当下“软件定义”、“数据驱动”的大背景下,国内外传统主机厂已经从特斯拉“硬件预埋、OTA升级、软件收费“模式带来的震撼中改变,纷纷开始大力投入操作系统的开发,尤其是自动驾驶操作系统的开发。本文重点分析国内外自动驾驶相关企业操作系统的发展现状和未来趋势。
01.自动驾驶操作系统架构
关于自动驾驶操作系统架构,笔者认为《车载智能计算基础平台参考架构1.0》已经给出了很好的描述,现已经成为行业共识。广义的自动驾驶操作系统包括系统软件(内核、虚拟化、中间件)和功能软件,向下适配异构分布硬件架构,向上支撑应用开发,目前国内外各类自动驾驶操作系统研发企业大都按照这个架构进行开发。
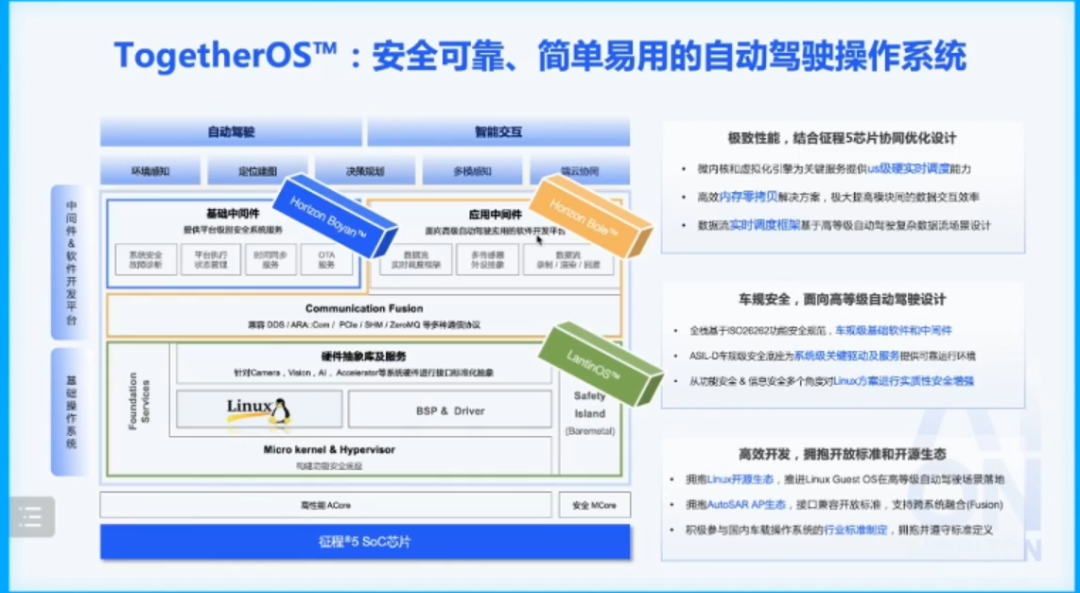
图1-车载智能计算基础平台参考架构
02.国内外OEM自动驾驶操作系统发展现状
1. 特斯拉
提到自动驾驶,始终无法绕开特斯拉,无论从纯视觉感知技术路线、软件全栈自研,还是订阅式的商业模式,特斯拉确实在引领着行业的发展。
Tesla.OS(Version)具有以下几个主要特点:
-
操作系统基于底层Linux自研;
-
功能软件方面支持PyTorch深度学习编程框架;
-
自动驾驶功能核心算法自研,并自建数据中心,收集用户使用数据用于不断优化算法软件,形成类苹果的闭环开发模式。
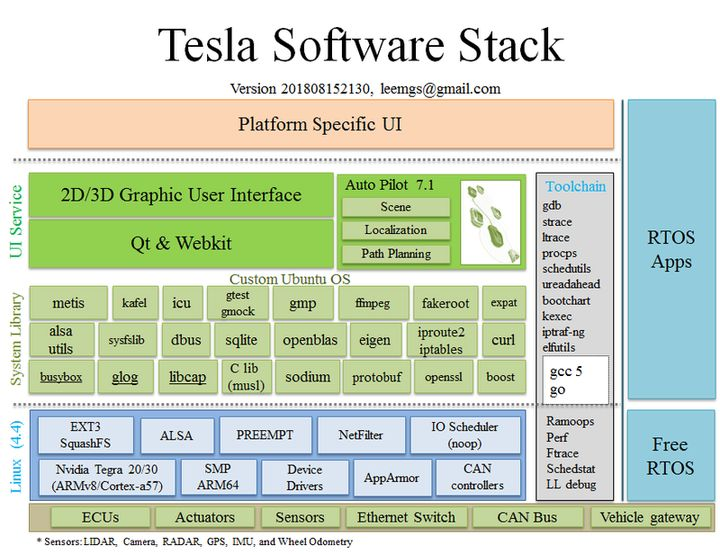
图2-特斯拉操作系统架构
目前特斯拉已构建自动驾驶系统FSD、OTA收费、Robotaxi三大核心,预计到2025年特斯拉软件业务收入有望达到175亿美元,总盈利空间高达百亿美元,贡献将比整车硬件销售更大。
2.大众
大众于2021年3月成立软件公司CARIAD,整合了大众旗下各品牌(大众、奥迪、保时捷等)约15家软件公司和集团内部顶尖工程师,重金投入软件研发。
CARIAD业务规划主要包含电子电气架构(E3)、大众汽车操作系统(VW.OS)、大众汽车云(VW.AC)、关键应用四块。
图3-大众CARIAD业务规划
大众VW.OS车载操作系统,基于AUTOSAR、域集成EE架构,促进传感器与ECU、ECU与ECU之间的高效联通,VW.OS将实现分布式处理向集中式处理方式的转换,将ECU功能集成,最终达到核心架构减少到三个车载中央处理器。VW.OS具有以下特点:
-
高性能处理器、高速网络;
-
Linux + Adaptive AUTOSAR操作系统;
-
应用软件和I/O功能解耦;
-
高效、快速开发用户功能;
-
减少整个系统的复杂性和应用之间的依赖性;
-
采用面向服务的通信。
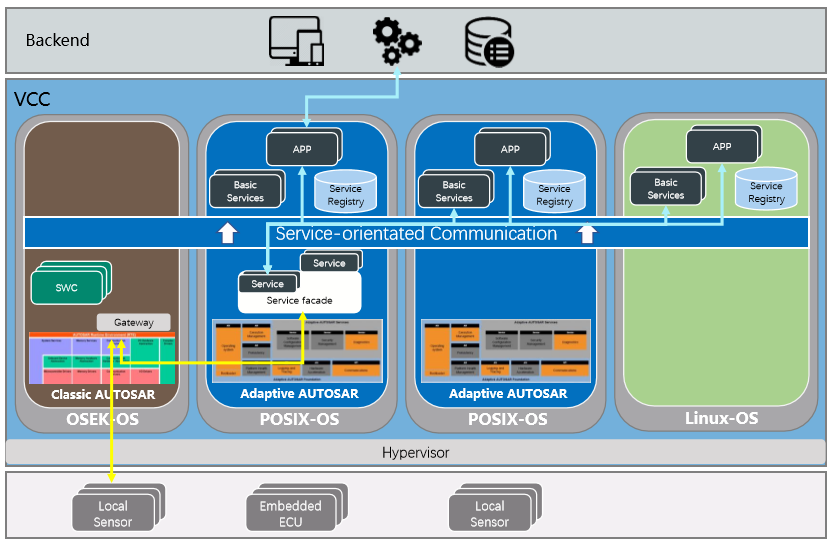
图4-VW.OS架构 来源:智能汽车设计
大众已自研VW.OS多年,ID.3为首款搭载VW.OS的量产车型,预计2025年起,大众旗下所有新车型有望搭载VW.OS,并通过该操作系统连接至大众汽车云平台(与微软合作),搭载L3级自动驾驶技术,并为L4级别自动驾驶做准备。


- 漂移、赛道、弹射:智能底盘如何把极限变成“可控”?
2026-03-26

- 智能底盘如何重构极限驾驶边界:定义与性能本质
2026-03-24

- 瓦力大作战|轻科普——误码仪(BERT)架构及测试原理解析
2026-03-04

- 为什么 HUD 合规真正“卡人”的不是参数,而是证据链
2026-02-10

- 辅助驾驶撞扛树枝老人、撞环卫工人是预期功能安全应该覆盖的事故么?
2026-02-10

- 大推力直驱技术助力EPS安全测试,为你的安全出行 “保驾护航”
2026-01-20

- 单机体积,双倍效能!激光切割机玩转“降本增效”
2026-01-20

- 同步难?空间挤?这款双出轴电机,是你双十二的“必囤”硬核好物
2026-01-20

- 即刻探索8台机器人如何解放数百名工人!
2026-01-20

- 考虑驱动单元性能变化的分布式驱动智能车辆强化学习增强运动控制
2026-01-16


