1.范围
2.目的
3.应用
4.定义
5.要求
6.测试条件
7.车-车测试
8.车辆-行人测试
9.误触发测试
10.测试车辆人工制动请求
8.4 静止行人
8.4.1 测试参数和设置
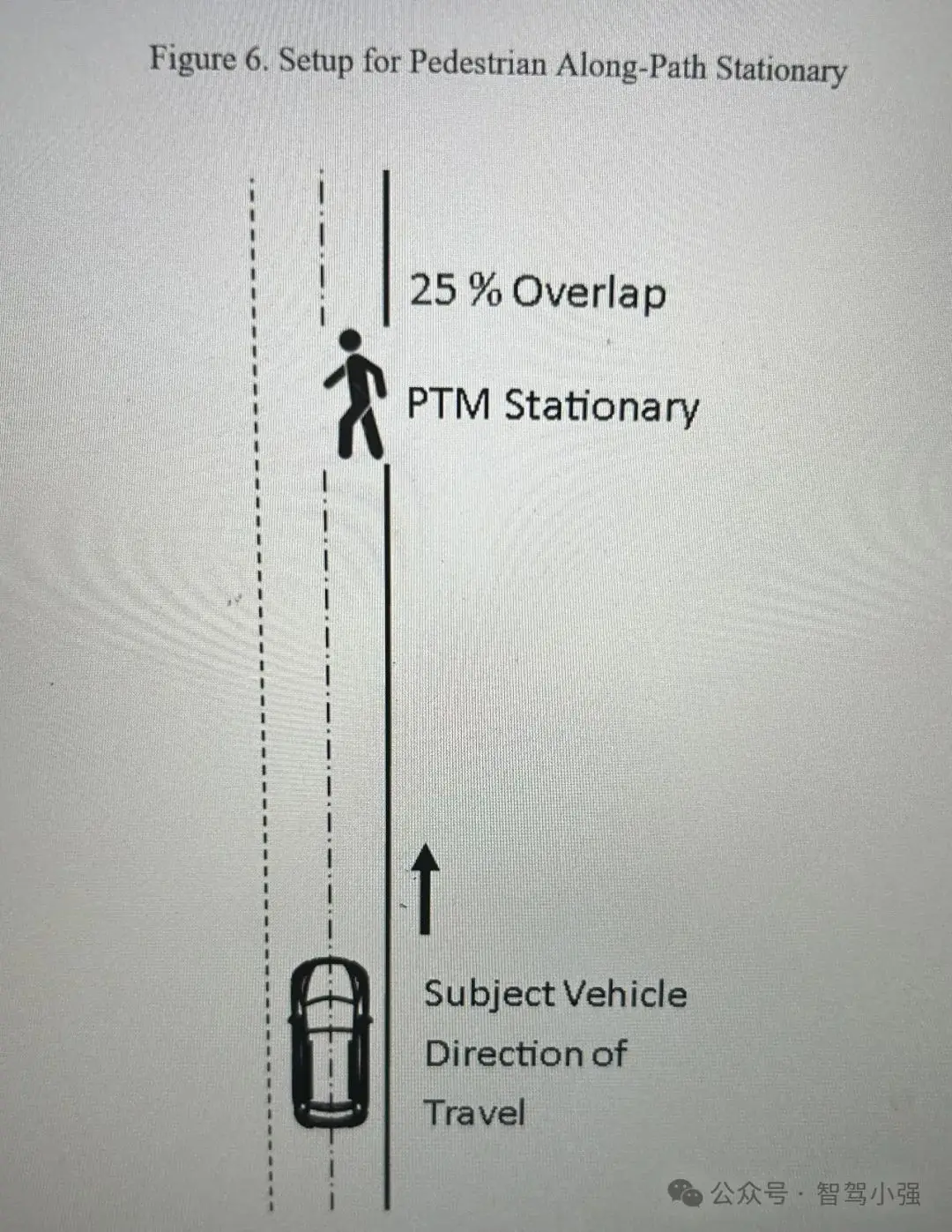
(a)测试区域按照图6设置。
(b)测试在白天或夜晚条件下进行。
(c)使用成人模型进行测试。
(d)行人模型设置在右侧25%的重叠位置,背对接近的测试车辆。
(e)测试车辆的速度为10km/h至55km/h之间的任何速度。
(f)行人测试模型是静止的。
8.4.2 在前方碰撞警告或车辆制动开始之前的测试行为
(a)测试车辆接近行人测试模型。
(b)从车头距离对应于L0开始,以最小且平稳的油门踏板输入将被测车辆速度保持在测试速度的1.6 km/h以内。
(c)当车头距离对应于L0时,以最小的转向输入维持测试车辆的航向,使得测试车辆的行驶路径横向偏离预期行驶路径不超过0.3 m,并且在任何自动制动开始之前,测试车辆的横摆角速度不超过±1.0°/s。
8.4.3 在前方碰撞警告或车辆制动开始之后的测试行为
(a)在前方碰撞警告或车辆制动开始后,测试车辆的油门踏板会以任何速率释放,以便在500ms内完全释放。如果车辆启用巡航控制,则省略此操作。
(b)在满足8.4.4的测试完成标准之前,不进行手动制动。
8.4.4 测试完成标准
当被测车辆完全停止而没有接触行人模型,或者当被测车辆接触行人模型时,测试结束。
8.5 行人沿着测试路径移动
8.5.1 测试参数和设置
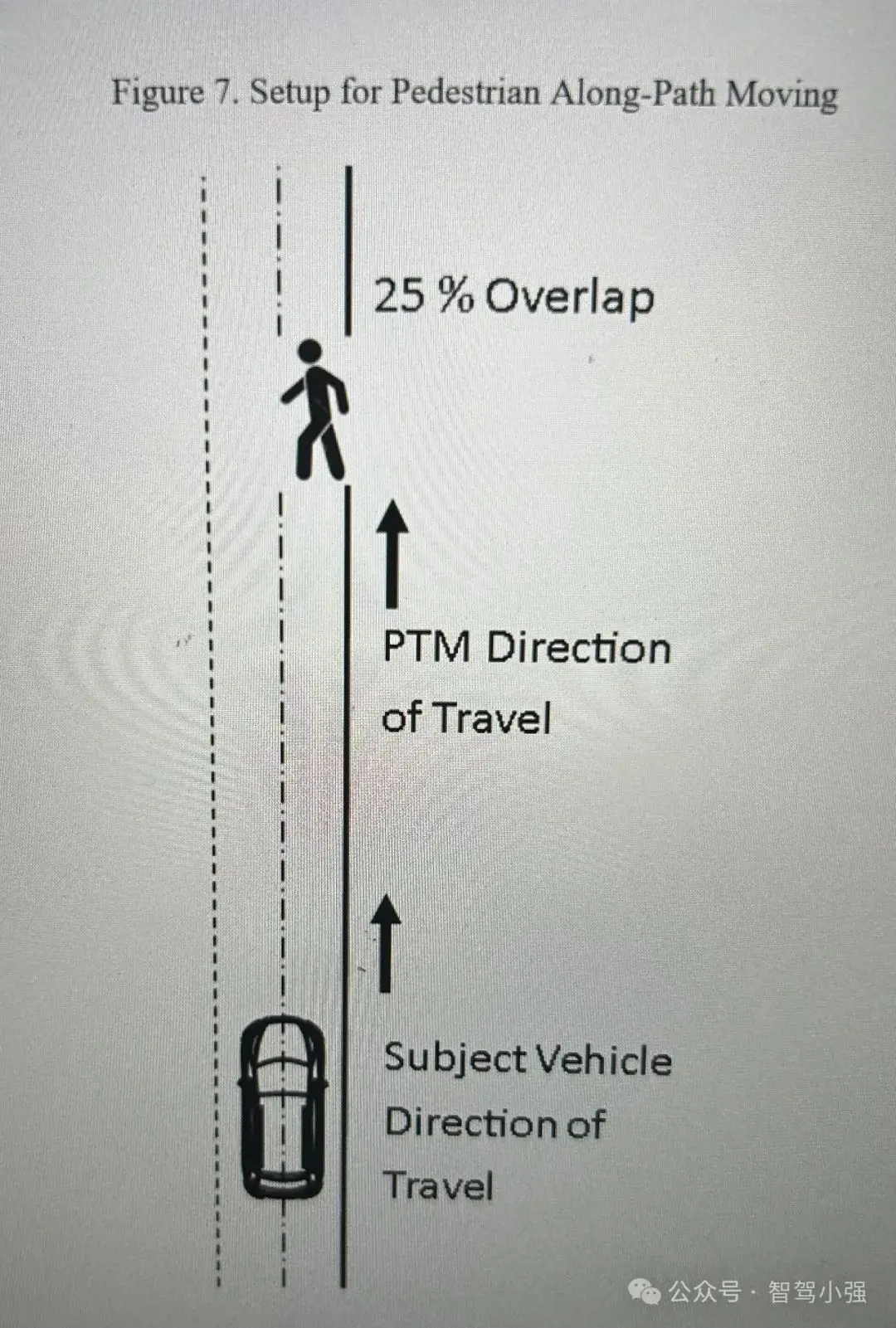
(a)测试区域按照图7设置。
(b)测试在白天或夜晚条件下进行。
(c)使用成人模型进行测试。
(d)行人测试模型的运动与被测车辆平行且方向相同。
(e)行人模型设置在右侧25%的重叠位置。
(f)测试车辆的速度为10km/h至65km/h之间的任何速度。
(g)行人测试模型速度为5km/h。
8.5.2 前方碰撞警告或车辆制动开始前的测试行为
(a)测试车辆接近行人测试模型。
(b)从车头距离对应于L0开始,以最小且平稳的油门踏板输入将被测车辆速度保持在测试速度的1.6 km/h以内。
(c)当车头距离对应于L0时,以最小的转向输入维持测试车辆的航向,使得测试车辆的行驶路径横向偏离预期行驶路径不超过0.3 m,并且在任何自动制动开始之前,测试车辆的横摆角速度不超过±1.0°/s。
(d)行人模型装置在被测车辆的前平面与行人模型上的平行接触平面之间的距离对应于L0之后的任何时间被触发,行人模型在在设备开始移动后1.5m内达到其预期速度,并将其保持在预期速度0.4km/h内,直到满足8.5.4的测试完成标准。
8.5.3 在前方碰撞警告或车辆制动开始后的测试行为
(a)在前方碰撞警告或车辆制动开始后,测试车辆的油门踏板会以任何速率释放,以便在500ms内完全释放。如果车辆启用巡航控制,则省略此操作。
(b)在满足8.5.4的测试完成标准之前,不进行手动制动。
8.5.4 测试完成标准
当测试车辆减速至低于行人测试模型行驶速度而不与行人测试模型接触或当测试车辆与行人测试模型接触时,测试结束。
9. 误触发测试
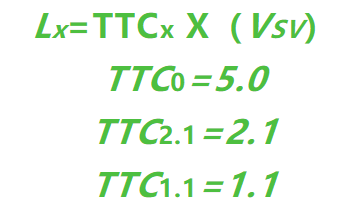
9.1 车头间距计算
对于在9.2和9.3下进行的每次测试,计算被测车辆前平面与钢沟槽板前缘或与车辆测试装置的最后平面之间的车头间距(L0、L2.1、L1.1),以米为单位,提供5.0秒、2.1秒和1.1秒的碰撞时间(TTC)。L0、L2.1和L1.1用以下等式确定,其中VSV是测试车辆的速度(以m/s为单位):
9.2 钢沟槽板误触发
9.2.1 测试参数和设置
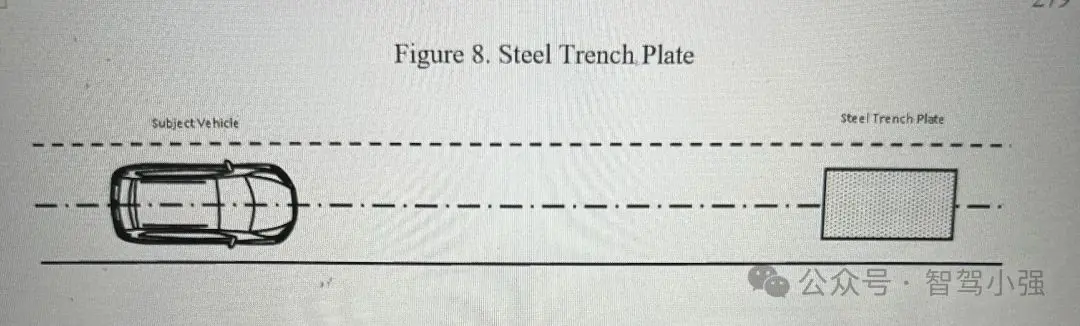
(a)测试区域按照图8设置。
(b)钢沟槽板被平坦地固定在测试路面上,以使其最长侧平行于车辆的预定行驶路径并水平地居中于车辆的预定行驶路径上。
(c)试验车辆的测试速度为80km/h。
(d)测试可以通过手动制动进行。
9.2.2 测试行为
(a)测试车辆接近钢沟槽板。
(b)从车头距离对应于L0开始,以最小且平稳的油门踏板输入将被测车辆速度保持在测试速度的1.6 km/h以内。
(c)当车头距离对应于L0时,以最小的转向输入维持测试车辆的航向,使得测试车辆的行驶路径横向偏离预期行驶路径不超过0.3m,并且在任何自动制动开始之前,测试车辆的横摆角速度不超过±1.0°/s。
(d)如果发生前方碰撞警告,测试车辆的油门踏板将以任何速率松开,以便在500ms内完全松开。对于启用巡航控制的车辆,此操作将被省略。
(e)对于没有使用手动制动的测试,在满足9.2.3的测试完成标准之前,不进行手动制动。
(f)对于使用手动制动的测试,当车头距离以任何速率对应于L2.1时,测试车辆的油门踏板(如果尚未松开)将以任何速率松开,从而在500ms内完全松开。
(g)对于使用手动制动的测试,按照第10章中的规定应用行车制动器。制动踏板启动发生在车头距离L1.1处。
9.2.3 试验完成标准
当测试车辆在越过钢质沟槽板的前缘之前停下来或当试验车辆越过钢质沟槽板的前缘时,试验结束。
9.3 穿行误触发场景
9.3.1 测试参数和设置
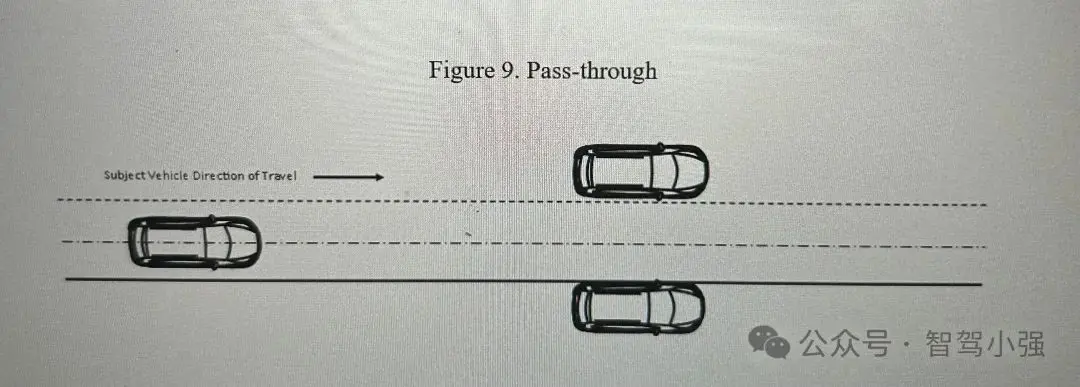
(a)测试区域按照图9设置。
(b)两个车辆测试装置被固定在彼此平行的静止位置,车辆最近的前轮之间的横向距离为4.5±0.1 m。两辆车之间的中心线平行于测试车辆的行驶路径。
(c)试验车辆的测试速度为80km/h。
(d)测试可以通过手动制动进行。
9.3.2 测试行为
(a)测试车辆接近两个车辆测试装置之间的间隙。
(b)从车头距离对应于L0开始,以最小且平稳的油门踏板输入将被测车辆速度保持在测试速度的1.6 km/h以内。
(c)当车头距离对应于L0时,以最小的转向输入维持测试车辆的航向,使得测试车辆的行驶路径横向偏离预期行驶路径不超过0.3m,并且在任何自动制动开始之前,测试车辆的横摆角速度不超过±1.0°/s。
(d)如果发生前方碰撞警告,测试车辆的油门踏板将以任何速率松开,以便在500ms内完全松开。
(e)对于没有使用手动制动的测试,在满足9.3.3的测试完成标准之前,不进行手动制动。
(f)对于使用手动制动的测试,当车头距离以任何速率对应于L2.1时,测试车辆的油门踏板(如果尚未松开)将以任何速率松开,从而在500ms内完全松开。
(g)对于使用手动制动的测试,按照第10章中的规定应用行车制动器。制动踏板启动发生在车头距离L1.1处。
9.3.3 测试完成标准
当测试车辆在其最后一点通过连接车辆测试装置最前面点的垂直平面之前停止时,或当测试车辆的最后一点通过连接车辆测试装置最前面点的垂直平面时,测试结束。
10. 测试车辆人工制动请求
10.1 制动开始时,测试车辆制动踏板处于自然静止位置,没有预载荷或位置偏移。
10.2 根据制造商的选择,使用位移反馈或混合反馈控制。
10.3 位移反馈控制
对于制动踏板位移反馈控制,制动踏板指令位置是在没有AEB系统激活的情况下导致平均减速度0.4g的制动踏板位置。
(a)平均减速度是指从踏板到达指令位置到车辆停止前250ms的时间内的减速度。
(b)踏板位移控制器以254±25.4 mm/s的速度踩下制动踏板至制动踏板指令位置。
(c)踏板位移控制器可能会超过指令位置20%。如果发生这种超调,将在100ms内进行纠正。
(d)最终实现的制动踏板位置是在踏板移位发生后100ms内到达指令位置偏差10%以内的任何位置,并且任何超调都得到校正。
10.4 混合反馈控制
对于制动踏板混合反馈控制,混合控制器将制动踏板调整到指令位置后开始调整施加在制动踏板上的力,在没有AEB系统激活的情况下导致平均减速0.4g。
(a)平均减速度是指从踏板到达指令位置到车辆停止前250ms的时间内的减速度。
(b)混合控制器以254±25.4 mm/s的速度踩下制动踏板至制动踏板指令位置。
(c)混合控制器可能会超过指令位置20%。如果发生这种超调,将在100ms内进行纠正。
(d)混合控制器开始控制施加在踏板上的力,并在踏板位移发生100ms后停止控制踏板位移,并且校正任何超调。
(e)混合控制器施加至少11.1N的踏板力。
(f)从踏板指令位移发生后350ms起,施加的踏板力保持在制动踏板指令力的10%以内,并且校正任何超调,直到测试完成。
来源:智驾小强