1.背景
2.范围&定义
3.技术要求
4.测试要求
5.电子控制系统安全方面的特殊要求
3.3 故障检测/自检
3.3.1
当ACPE发生故障,导致无法满足本法规的要求时,应向驾驶员发出故障警告。警告应符合第3.4.3段的规定。
不需要向驾驶员提供故障警告信号以指示ACPE暂时不可用,例如由于恶劣天气条件。
3.3.2
每次ACPE自检之间不得有明显的时间间隔,在检测到故障的情况下,发出警告信号不得有延迟。
3.3.3
如果检测到非电气故障情况(例如传感器失明或传感器错位),也应向驾驶员发出故障警告,除非根据第3.2.3段给出停用警告。
3.2.4
如果检测到故障时车速大于10km/h,则应在下次车速低于10km/h时发出警告信号。
3.4 警告信号
3.4.1 一般要求
3.4.2 干预警告信号
应通过光学信号发出干预警告。此外,应向驾驶员提供触觉或声音信号,除非具有目标检测能力的其他车辆系统已经提供了这种信号(例如停车距离警告)。
光学警告信号可以是故障警告信号的闪烁。
车辆制造商应在型式认证时提供向驾驶员呈现的警告指示的描述,并记录在测试报告中。
3.4.3 故障警告信号
故障警告应为恒定的黄色光信号。

3.5 定期技术检查规定
3.5.1
在定期技术检查中,可以通过对故障警告信号状态的可见性观察来确认ACPE的正确运行状态。在“通电”(上电自检)和任何灯泡检查之后,如果在上一个上电周期结束时存在任何故障,则故障警告信号应保持亮起,除非检测到该故障不再存在。
在故障警告信号位于公共空间中的情况下,必须在故障警告信号状态检查之前观察公共空间的情况。
3.5.2
在型式批准时,制造商选择的防止故障警告信号被篡改的方法应保密地概述。或者,当检查ACPE正确运行状态的辅助方法可用时,可以满足此保护要求。
4.测试要求
4.1 测试路面和环境条件
4.1.1
试验应在具有良好附着力的平坦、干燥、混凝土或沥青路面上进行。
4.1.2
测试路面应在水平和1%坡度之间具有一致坡度。
4.1.3
环境温度应在0°C至45°C之间。
4.1.4
水平可见范围应允许在整个测试过程中观察到测试目标。
4.1.5
测试应在没有可能影响到结果的风速下进行。
4.1.6
测试区域内的自然环境照明必须是均匀的,且超过1000Lux。应确保在朝向或远离太阳低角度行驶时不进行测试(避免阳光直射眩光)。
4.1.7
应制造商要求并经技术服务部门同意,测试可在偏离测试条件(次优条件,例如在不干燥的表面上;低于规定的最低环境温度)下进行,同时仍需满足性能要求。
4.2 测试设备精度
4.2.1
车辆速度的测量精度应为±0.1 km/h。
4.2.2
车辆位置的测量精度应为±0.03 m。
4.2.3
加速器控制力(如适用)的测量精度应为±1N。
4.2.4
加速器控制位置的测量精度应为±1%。或者,由制造商选择。此测量可从车辆自身的位置传感器获取。
4.2.5
测量值应以至少100 Hz的频率记录。
4.3 测试车辆
4.3.1 测试前调节
如果车辆制造商要求:
(a)该车辆最多可以在城市和乡村道路上行驶100公里,以初始化传感器系统。
(b)车辆可以进行一系列制动激活,以确保行车制动系统在测试前安装到位。
车辆制造商要求的预测试条件的详细信息应被识别并记录在车辆类型批准留档中。
4.3.2
在进行任何测试之前,应确保ACPE已打开并准备好运行。
4.3.3 测试质量
车辆应在以下条件下进行测试:
(a)在最小质量下(行驶质量+最大额外附加质量为125kg);
(b)如果这被认为是合理的,认证机构可以在制造商定义的技术允许的最大载重质量下的任何其他质量进行测试。
一旦测试程序开始,测试质量不得进行任何更改。

4.4 测试障碍物目标
用于车辆检测测试的障碍物目标应是M1类常规大批量生产的乘用车,或者根据制造商的选择,使用符合ISO19206-1:2018或ISO19206-3:2021标准的,适用于被测ACPE传感器系统的识别特性的,代表乘用车的“软目标”。
4.5 加速控制器误用试验
目标的中心线与测试车辆的中心线的横向偏移应在0.0 m~0.2 m之间。
测试程序应如下:
试验应在有或没有预期的前后ACPE干预的情况下进行,并且至少在试验开始时车辆距离目标位置1.0 m(+0.1 m公差)和1.5 m(-0.1 m公差)的情况下进行(详见下表)。
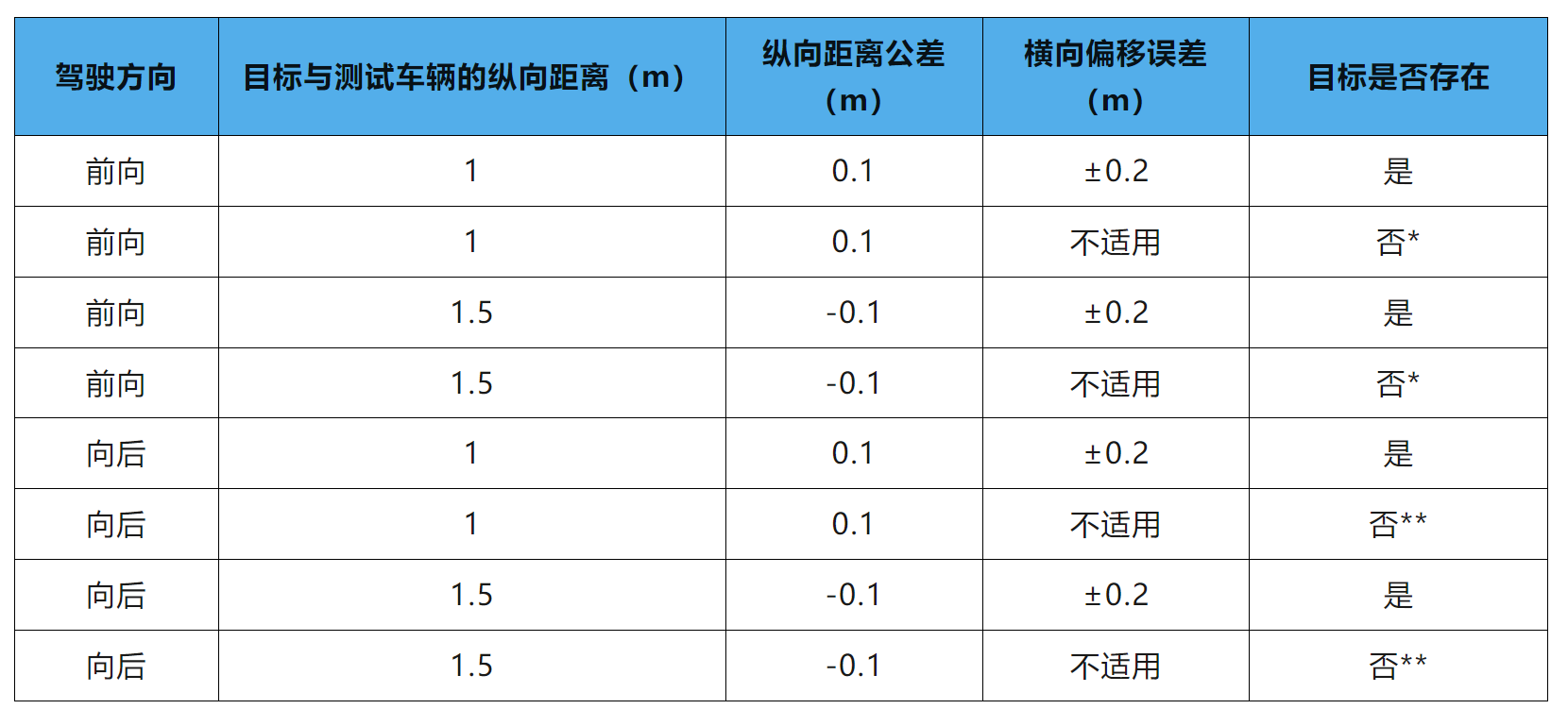
目标是否存在:
是:通过ACPE干预
否:ACPE停用或无需ACPE干预
*这些测试可以合并
**这些测试可以合并

每次测试的程序如下:
在任何测试开始之前,如果制造商要求,车辆可以在目标方向上行驶长达20 m的距离到开始位置和/或重新上下电。
4.6
如果这被认为是合理的,在第4.5段所述的测试期间,认证机构可以在第3.1段规定的任何测试条件下进行测试。
5.电子控制系统安全方面的特殊要求
5.1 一般要求
就本法规而言,本章节定义了复杂电子车辆控制系统安全方面的留档、故障策略和验证的特殊要求。
就本法规而言,本章节也应适用于本法规中确定的由电子控制系统控制的与安全有关的功能。
本章节没有具体说明“系统”的性能标准,但涵盖了应用于设计过程的方法论以及为型式批准目的必须向技术服务部门披露的信息。
该信息应表明“系统”在非故障和故障条件下满足本法规其他地方规定的所有适当性能要求,并且其设计为以不会引起安全关键风险的方式运行。

5.2 定义
就本章节而言
“该系统The System”:指提供或构成本法规适用功能的控制传输的一部分的电子控制系统或复杂电子控制系统。这还包括本法规范围内涵盖的任何其他系统,以及与本法规范围之外的其他系统之间的传输链接,这些系统作用于本法规适用的功能。(ACPE子系统及关联系统)
“安全概念Safety Concept”:是对系统设计措施的描述,例如在电子单元内,以解决系统完整性问题,从而确保在故障和非故障条件下的安全运行。安全概念的一部分可能是回退到部分运行甚至是重要车辆功能的备用系统。
“电子控制系统Electronic Control System”:是指一组单元的组合,旨在通过电子数据处理合作产生所述车辆控制功能。这些系统通常由软件控制,由传感器、电子控制单元和执行器等离散功能组件构建,并通过传输链路连接。它们可能包括机械链接、电-气链接或电-液链接。
“复杂电子车辆控制系统Complex Electronic Vehicle Control Systems”:是指由电子系统或驾驶员控制的功能可能被更高级别的电子控制系统/功能覆盖的电子控制系统。被覆盖的功能成为复杂系统的一部分,以及本法规范围内的任何覆盖系统/功能。本法规范围之外的与覆盖系统/功能(ACPE)之间的传输链接也应包括在内。
“高级电子控制"Higher-Level Electronic Control”:系统/功能是指采用额外的处理和/或传感装置,通过命令车辆控制系统功能的变化来改变车辆行为的系统。这使得复杂的系统能够根据感知的情况自动改变其目标的优先级。
“单元Units”:是本章节将审议的系统组成部分的最小分类,为了识别、分析或更换的目的,这些组成部分的组合将被视为单一实体。
“传输链路Transmission links”:是用于连接分布式单元以传输信号、操作数据或能量供应的手段。这种设备通常是电气的,但在某些部分可能是机械的、气动的或液压的。
“控制范围Range of control”:指的是输出变量,并定义了系统可能行使控制的范围。
“功能操作的边界Boundary of functional operation”:定义了ACPE系统能够保持控制的外部物理限制的边界。
“安全相关功能Safety Related Function”:是指“系统”能够改变车辆动态行为的功能。“系统”可能能够执行一个以上的安全相关功能。
来源:智驾小强












