在对新能源汽车驱动电机的控制中,当驱动电机类型为永磁同步电机(PMSM)时,通常采取的常规控制方式是通过外环速度环加上内环电流环的双环控制策略,并在电机高速运行时采用弱磁控制来扩展电机的转速范围。这多种策略在电机控制中所提供的功能支持分别释义如下:
1. 外环速度环
外环速度环顾名思义其主要负责控制电机的转速,通过接收系统需求的速度指令V需求并将其与通过传感器采集来的实际转速V实际进行比较,并采用如PID、模糊控制等控制模型,根据速度信号差ev=V需求-V实际,输出相应值,以该输出值为目标电流值I目标,并将其传递给内环电流环。
2. 内环电流环
内环电流环主要负责控制电机运行时的电流,通过接收来自外环速度环或特定条件下的目标电流值I目标,并将其与通过传感器采集来的实际电流I实际进行比较,并采用如PID、滑膜控制等控制模型,根据电流误差信号eI=I需求-I实际,输出电压控制信号,该电压信号被转换为PWM信号后,通过调节其占空比,实现对IGBT等开关元件的导通与关断控制,从而达成对电机绕组中电流的控制。
在驱动电机的控制中,电流环通常分为直轴电流环Id环和交轴电流环Iq环。
2.1.直轴电流环Id环
Id环主要用于控制电机的直轴电流,该电流与电机的磁链有关,影响着电机的励磁状态。当电机处于中低速运行区间时,为了提高电机效率,降低损耗,此时的Id目标值会被设置为0或很小的值,此时的Id环将基于直轴电流误差信号ed去调整电机的直轴电压指令
当在高速区间时,电机进入弱磁控制区域,为了提高电机的最大运行速度,通过在直轴上施加负Id电流以减弱磁链,从而达到控制目的。此时直轴电流Id与电机转速之间呈现非线性关系。
2.2.交轴电流环Iq环
Iq环主要用于控制电机的交轴电流Iq,该电流与电机产生的扭矩有关,影响着电机的输出扭矩。在中低速运行区间,Iq环通过接收由速度环的输出值,并将其作为目标Iq电流值,同时根据交轴电流信号差eq去调整电机的交轴电压指令。
在高速运行时,由于此时直轴电流Id被设置为负数(与ω呈非线性关系),此时转速环输出的目标值可表示为:u(t)=I目标=[aω2+bω+c,Iq,目标]T。在此运行状态下,Iq,目标可根据整车需要维持的扭矩状态得到,即Iq,目标=T/Kt,T为期望的扭矩,Kt为扭矩常数。
交轴电流Iq与电机产生的扭矩成正比,因此通过控制交轴电流Iq可以控制电机的输出扭矩。在驱动模式下,交轴电流Iq为正值,以产生正向扭矩,推动车辆前进。在能量回收模式下,交轴电流Iq通过反电动势产生,并与驱动模式下的电流方向正好相反,其所产生的扭矩亦为反向扭矩,从而可起到对车辆制动的作用。
简而言之,在电流环控制中,当电机运行在中低速范围内时,主要依靠交轴电流环对电机进行控制,当电机转速接近最大转速时,启动弱磁控制,通过调整直轴电流环的目标值来减弱电机的磁链,从而提高电机的最大转速。
3. 弱磁控制
弱磁控制是一种在电机高速运行时采用的控制策略,其原理是通过引入一个负向直轴电流 Id来减弱电机的磁链从而达到提高电机的最大转速的目的。在电机处于高速运行环境时,通过与电流环的结合,即通过Id环的作用,对目标直轴电流值进行调整来实现对电机的弱磁控制。
4、反电动势
再驱动模式下,当电机进入高速运行区后,反电动势将会限制电机接收电流的能力,因此需要通过降低反电动势以提升电机的运行速度范围。而当电机由驱动模式切换至发电模式后,原本在驱动模式下应用的弱磁控制、速度环将被停止,而电流环的策略需要进行调整,此时由于交轴电流是通过反电动势所产生的,且无法直接控制,因此需要通过对直轴电流的控制,以间接实现对交轴电流的控制,从而起到控制反扭矩的作用,因此电流环在此时将以直轴电流环为主要应用。
5、总结
在新能源汽车驱动电机的控制中,驱动模式下,当电机处于中低速区间时,控制策略主要依赖交轴电流环来控制电机的扭矩和转速。当进入高速区间后,将启动弱磁控制,通过调整直轴电流环的目标值来减弱磁链,从而提高电机的最大转速。在整个控制过程中,外环速度环和内环电流环紧密协作,以确保电机高效、稳定地运行,并满足车辆的行驶需求。
在发电模式下,弱磁控制、速度环不再需要,基于能量回收强度的不同,通过电流环中的直轴电流环对直轴电流Id进行控制,以实现对反电动势的控制,从而调整不同能量回收强度下的再生制动力,以满足能量回收的需求效果。
对不同工作模式下的控制关系整理如下:
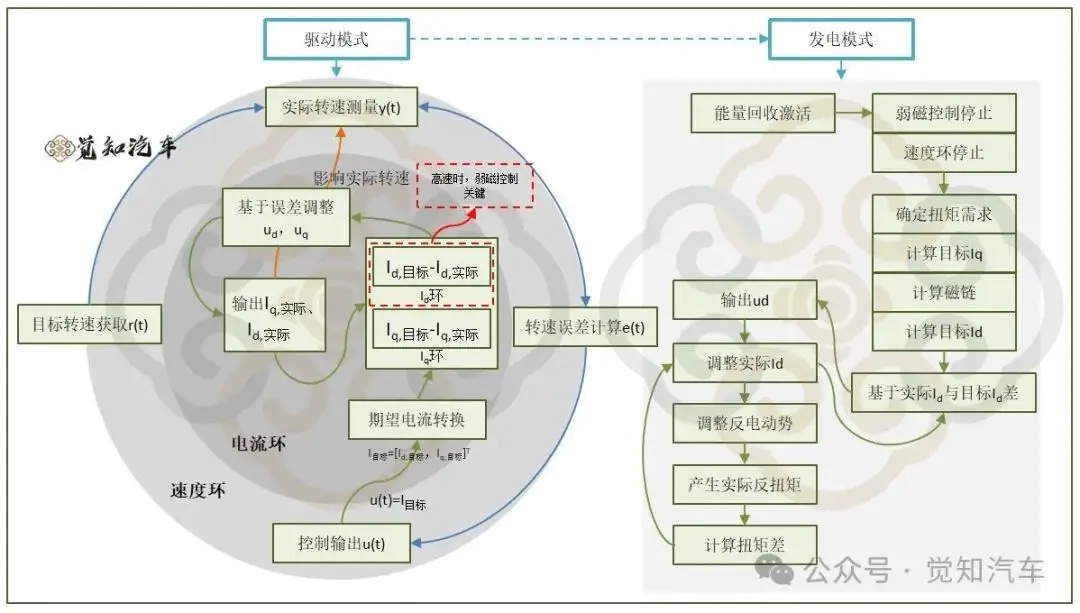
图1 不同工作模式下,控制关系
来源:觉知汽车













