在汽车业界,保时捷以其卓越的性能和精良的技术赢得了广泛的赞誉。其中,Active Ride液压主动悬挂系统更是引领了汽车技术的潮流。这套系统通过复杂的机械结构和液压系统,让车辆在行驶过程中实现起伏和侧倾的动作,仿佛在“跳舞”。
Active Ride液压主动悬挂系统的运作主要依赖于精密的传感器和复杂的机械结构。它能够实时感知路况变化并调整悬挂系统的刚度和阻尼,使车辆在各种路况下都能保持稳定。这种技术的出现,不仅提高了车辆的操控性和舒适性,也让驾驶体验变得更加独特和刺激。
本文就以车辆原地“跳舞”模式为例,探索一下该系统的奥秘。利用carsim和simulink联合仿真,通过光滑的正弦曲线作为Compressive force from damper的输入,其中正弦曲线的周期(速度)和幅值(高度)可调,并带有相位差,同时,给1MPa制动压力模拟车辆停车工况,进而复现一个简单的跳舞功能。
1.Carsim模型
在carsim中建立车辆动力学模型,主要包括悬架参数设置与输入输出端口设置。
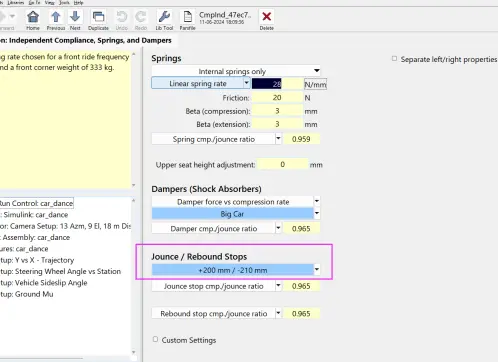
1.1调节carsim中悬架的参数
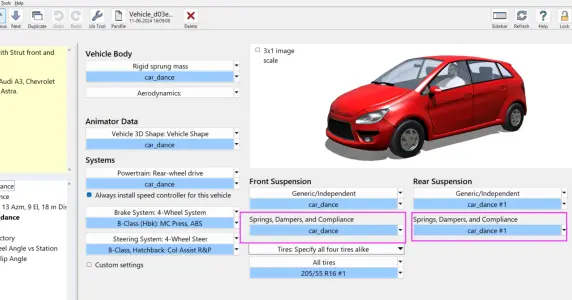
其中,建议选择大行程的悬架系统,这样车辆作动幅度比较大,效果会比较明显。
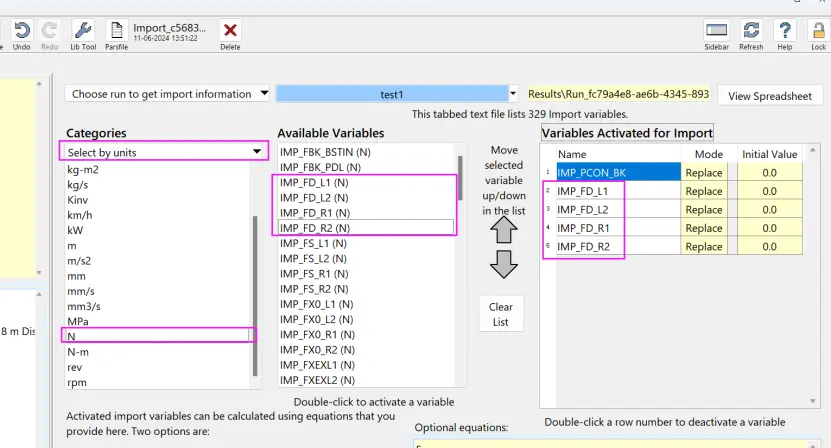
1.2输入端口设置
设置输入输出接口,主要是四个悬架作动力。注意simulink模型中的输入输出端口与carsim中的设置必须一致,否则仿真报错,具体设置方法可参考公众号文章:基于carsim的分布式驱动汽车原地掉头功能仿真。
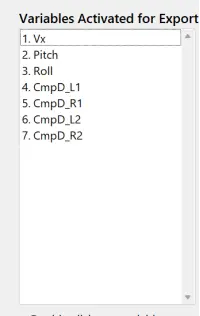
1.3输出端口设置
输出车身俯仰角和侧倾角以及悬架状态。
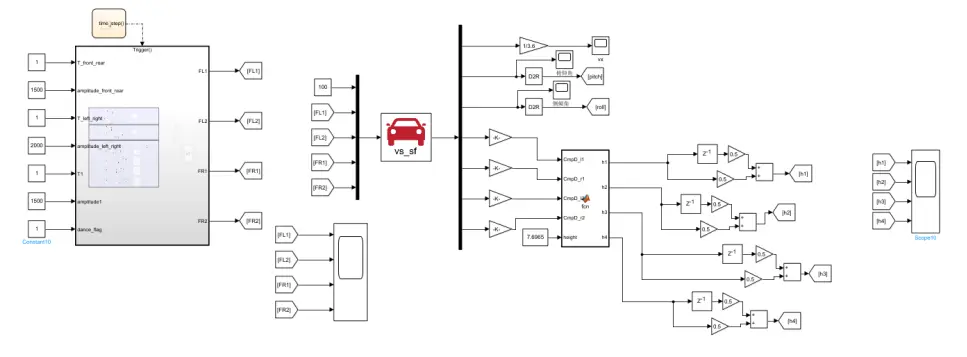
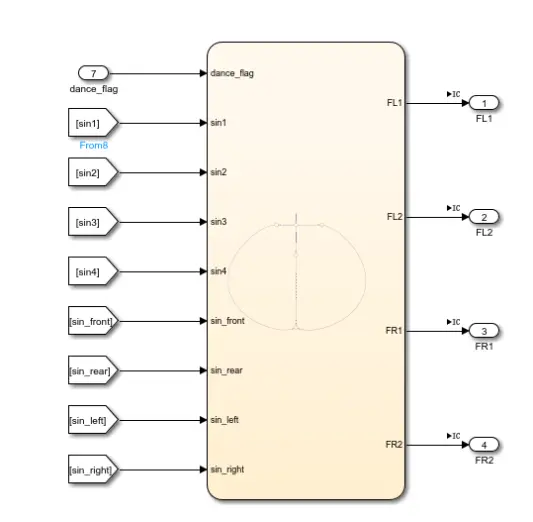
2.Simulink模型
在simulink中建立悬架控制模型,如下所示,并设置采样步长为0.01s。
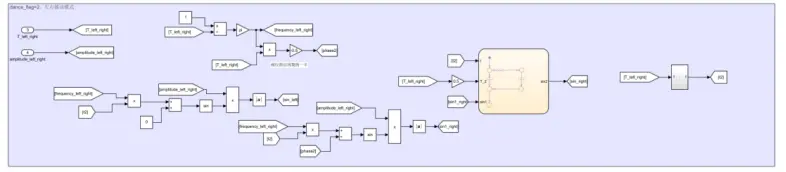
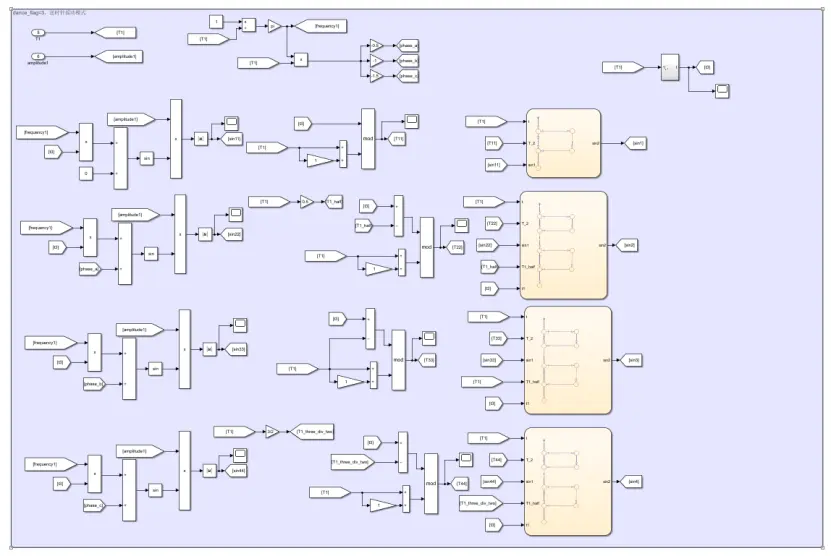
三种不同的跳舞模式控制模型如下图所示。
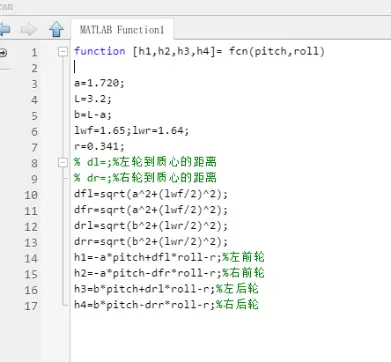
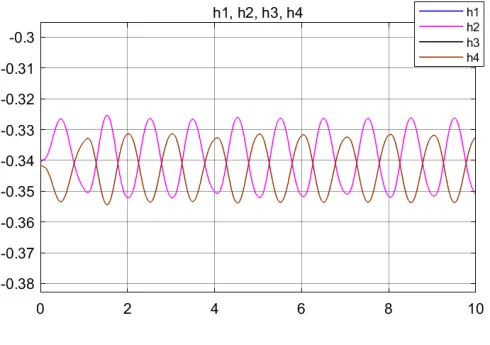
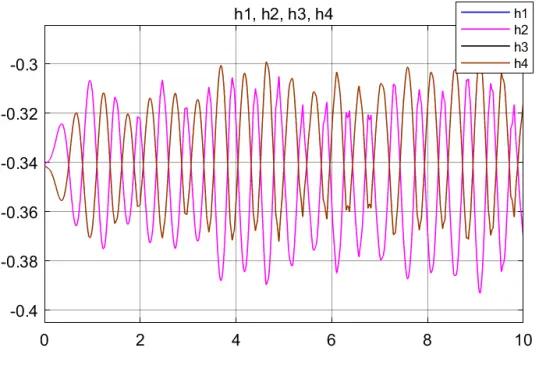
根据车身刚体的几何关系计算悬架高度,具体过程如下所示。
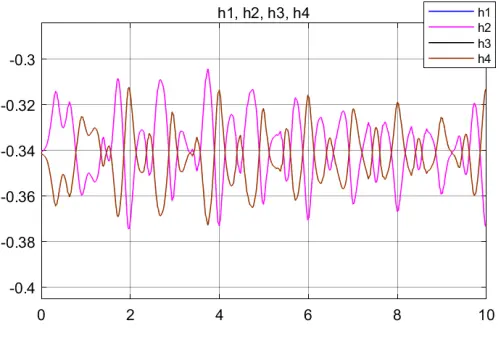
3.仿真结果
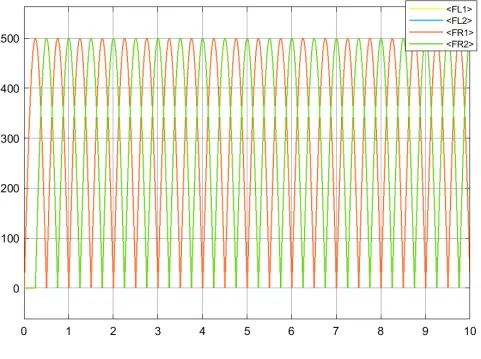
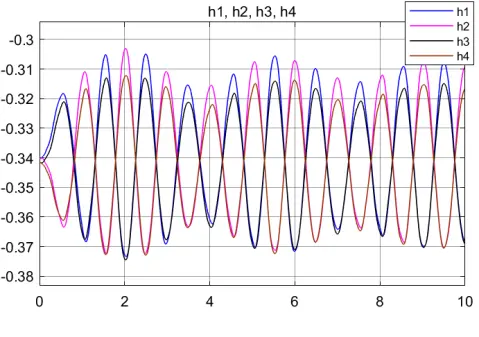
3.1俯仰跳舞
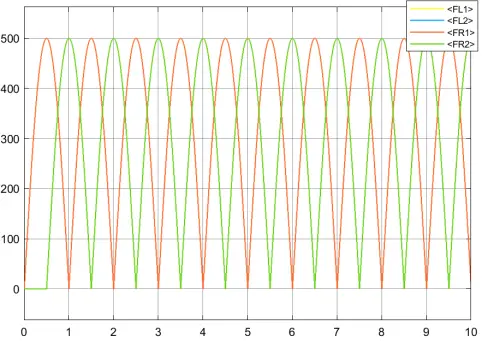
3.1.1输入周期为1s,幅值为500的正弦波
车体的位移:
3.1.2输入周期为0.5s,幅值为500的正弦波
车体的位移:
可以通过调节正弦波的幅值来调节跳舞的速度。
3.1.3输入周期为1s,幅值为1500的正弦波
车体的位移:
可以通过调节正弦波的幅值来调节跳舞的高度,仿真效果如下所示。
0/0
继续观看
基于carsim的汽车跳舞功能仿真
当改变悬架参数后再次进行仿真,仿真结果如下所示。
0/0
继续观看
基于carsim的汽车跳舞功能仿真
此时后轮会有离地现象的发生。因此俯仰跳舞的正弦幅值可以选在100-1500。
3.2侧倾跳舞
输入周期为1s,幅值为500的正弦波
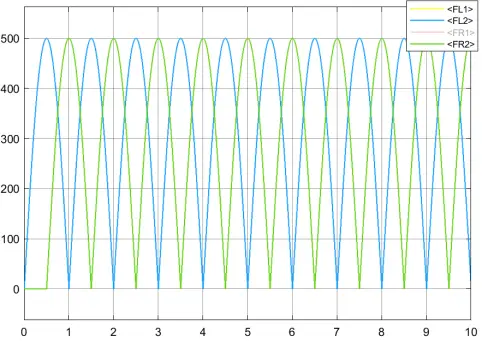
车体的位移:
仿真效果如下所示。
0/0
继续观看
基于carsim的汽车跳舞功能仿真
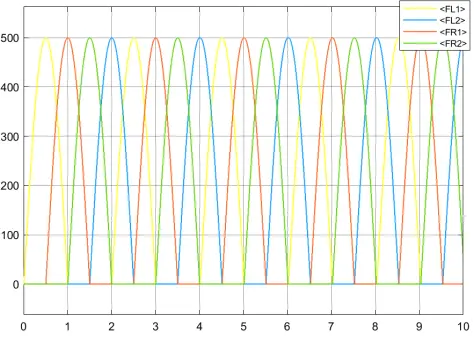
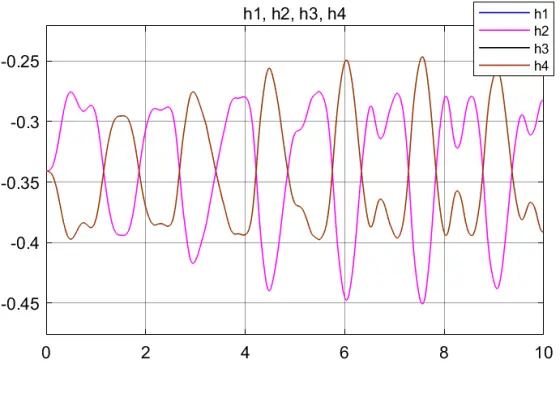
3.3从左前轮开始顺时针跳舞
输入周期为1s,幅值为500的正弦波。
车体的位移:

输入dance_flag=1,周期=1.5s,幅值=3000
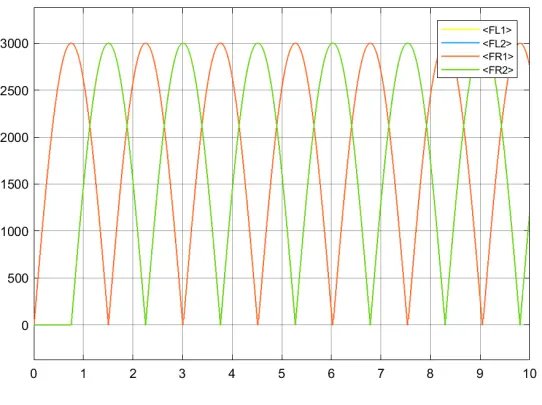
车体位移
俯仰角变化图
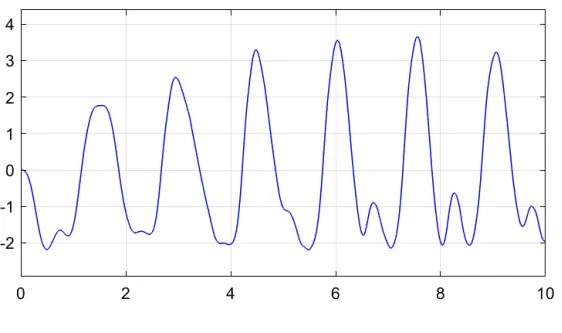
仿真效果如下所示。
来源:智能运载装备研究所
作者:左太虎













