为确定PWM信号的控制周期T,首先对不同PWM频率进行电磁阀特性测试,发现PWM频率为200Hz时,电磁阀的线性度最好,便于进行压力控制,因此选择PWM信号的控制频率为200Hz。然后分别对RBU进液阀的增压特性与出液阀的减压特性进行测试。
在进液阀的增压特性测试中,打开吸入阀,关闭隔离阀,启动泵电机建压,改变进液阀PWM占空比值(PwM)进行试验,记录轮缸压力曲线,最终得到不同PWM占空比值下进液阀的增压特性曲线(以右前轮为例)如图6所示。从图6可以看出,在经过短暂的延迟后,制动压力的上升均大致呈线性趋势,同时可以确定当PWM占空比值小于0.4时,进液阀接近全部开启。
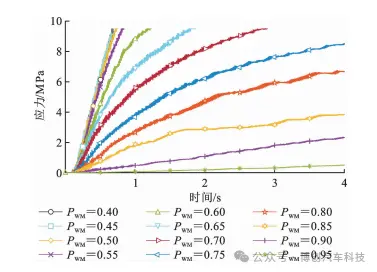
图6 右前轮进液阀增压特性曲线
根据增压特性曲线,将进液阀PwM可控区间选择为0.40~0.95,根据增压数据计算出不同占空比下对应的增压速率,得到表1所示占空比—增压速率表用于后续压力控制。
 表1 进液阀不同占空比增压速率
表1 进液阀不同占空比增压速率
对出液阀的减压特性测试与进液阀的增压特性测试类似,不同的是出液阀的减压速率除了与PWM占空比有关,还受到初始制动压力即阀口压差影响,因此需要对不同的初始制动压力进行测试,分别进行了初始制动压力为1、2、4、6、8MPa的减压特性测试,此处仅对初始制动压力8MPa的右前轮减压特性进行展示,如图7所示。
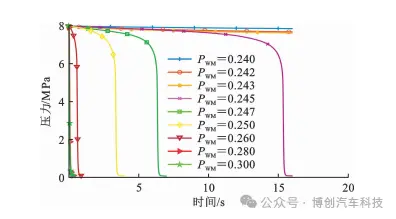
图7 右前轮出液阀减压特性曲线
相较进液阀的增压可控区间,出液阀的减压可控区间要小的多,通过减压初期的试验数据计算出不同占空比下对应的减压速率,如表2所示。
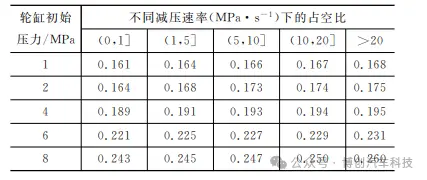
表2 出液阀不同占空比减压速率
2.2.2 RBU压力控制
RBU的压力控制原理如图8所示,分为误差处理、模式切换、增压控制、减压控制、保压控制以及控制输出。
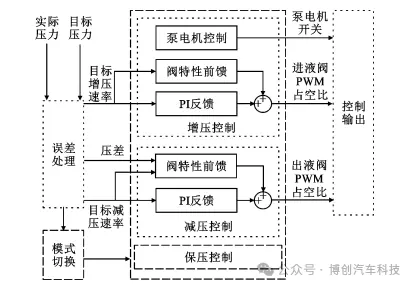
图8 RBU压力控制算法原理
误差处理部分根据目标压力P与实际压力P求得压力误差△P以及目标增减压速率;模式切换部分对压力误差进行死区处理,首先设置死区区间为(—0.1,0.1),然后通过压力误差的死区处理结果进行模式切换,切换逻辑如式(17)所示
增压控制采用阀特性前馈加PI反馈的控制方法,前馈值根据阀特性试验获得的进液阀不同占空比增压速率(表1),由目标增压速率查表得到进液阀PWM占空比前馈值DPLFF;反馈使用PI控制,对目标增压速率做比例和积分处理得到进液阀PWM占空比反馈值DPFB,然后将进液阀PWM占空比前馈值与反馈值相加即得到最终输出的进液阀PWM占空比值Dm1,如式(18)所示,同时打开吸入阀,关闭隔离阀,出液阀保持关闭,启动泵电机完成建压动作。式(18)可表示为
式中:KP1和Ku分别为增压PI控制器的比例系数和积分系数。
减压控制同样采用阀特性前馈加PI反馈的控制方法,前馈值根据阀特性试验获得的出液阀不同占空比减压速率(表2),由目标减压速率和压力差查表获得出液阀PWM占空比前馈值DP2FF;PI反馈控制对目标减压速率做比例和积分处理得到出液阀PWM占空比反馈值DP2B,最后将出液阀PWM占空比前馈值与反馈值相加即得到最终输出的出液阀PWM占空比值D2,如式(19)所示,同时打开吸入阀,关闭隔离阀,进液阀保持关闭。式(19)可表示为

式中:KP2和K分别为减压PI控制器的比例系数和积分系数。
保压操作时,RBU进液阀与出液阀均关闭,保持轮缸内压力不变。
控制输出部分将得到的进液阀与出液阀PWM占空比值以及泵电机开关信号输出给相应的执行器以实现压力控制。
3硬件在环试验验证
3.1硬件在环试验台
为验证冗余电控制动系统电流传感器容错控制算法,搭建了硬件在环试验台,试验台架构如图9所示。硬件在环试验台主要包括IBC及其原型控制器(Micro Auto BoxⅡ)、RBU及其原型控制器(Mi- cro Auto BoxⅢ)以及上位机(Host PC)、电机驱动 与电磁阀驱动器Rapid Pro等。上位机用于搭建控制算法模型,将RBU压力控制算法模型编译下载到Micro Auto BoxⅢ中运行,将IBC算法模型(包 括故障诊断及容错控制算法)编译下载到MicroAuto BoxⅡ中运行,二者间通讯通过Can实现,在试验过程中利用试验管理软件Control Desk进行参数调整、数据记录以及进程管理等。
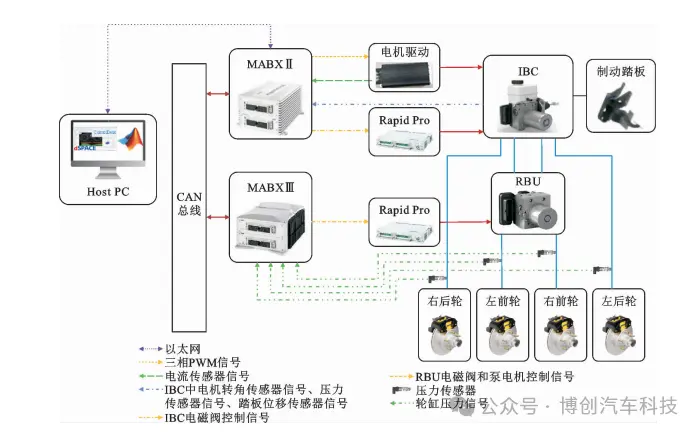 图9 硬件在环试验台架构
图9 硬件在环试验台架构
3.2RBU压力控制试验验证
为验证RBU压力控制策略的有效性,分别选取阶跃、斜坡、正弦作为建压目标进行压力控制测试,测试结果如图10所示。
图10 RBU制动压力曲线
由图10可以看出:在阶跃工况下,由于RBU电机及柱塞泵响应速度较慢导致建压存在一定的迟滞、增压时存在少许超调,但是在整体上压力控制效果较好,控制误差较小,同时由于RBU仅在容错控制时才参与制动,倾向于制动安全,因此控制效果满足要求。
来源:博创汽车科技 作者:朱冰 隋清海 等













