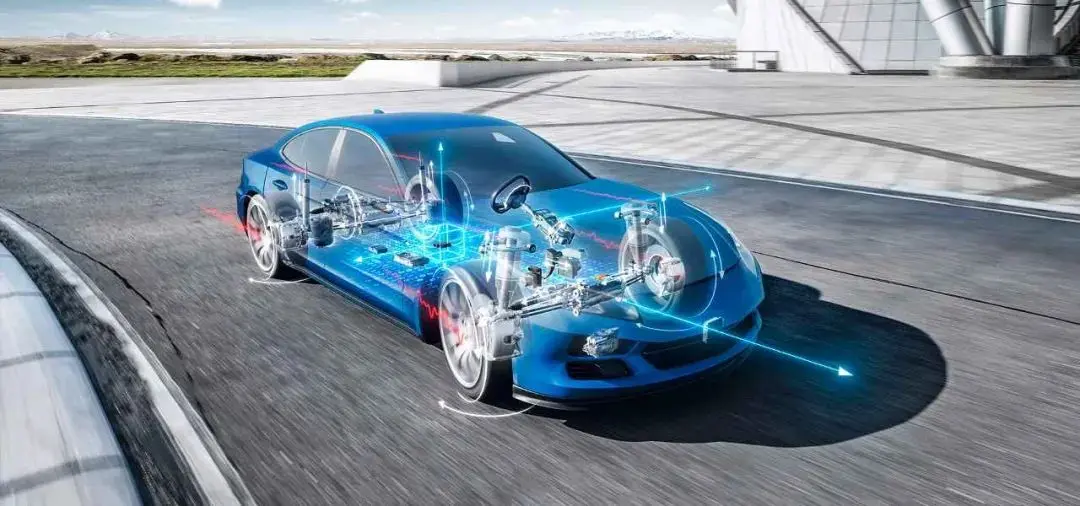
采埃孚的车辆运动控制(VMC)系统cubiX将虚拟驾驶员的驾驶指令转化为实际的车辆运动指令。该系统既可用于传统汽车,也可用于电动商用车及特种车辆。(采埃孚)
基于“无依赖(system-agnostic)”概念打造的这一系统可以整合来自其他供应商的组件和系统。
未来底盘会是什么样的?这是采埃孚在最近于其英国研发中心举办的活动上提出的问题。该中心专注于控制技术、材料、机电一体化、软件、系统集成、嵌入式电子和电力电子系统的研发。
和其他汽车领域一样,底盘也将不可避免地适应新兴趋势,如电气化、软件定义汽车、自动驾驶和新型电气架构。不过,未来的底盘动力学仍然需要处理车辆的侧倾、偏转和俯仰等问题。为了整合需求,如L5级自动驾驶以及包括驾驶员参与的所有阶段,采埃孚设想了一个同时适用于内燃机和电驱系统的系统,该系统基于一个底盘控制器打造,比如在2022年末在Lotus Eletre上首次亮相的cubiX系统。cubiX的设计采用了“system agnostic”概念,因此可以整合来自其他供应商的组件和系统。

采埃孚展出的线控转向组件,包括 SBW手轮执行器、集成 CD 转向装置和燃料电池压缩机等。(采埃孚)
cubiX系统并没有对转向、制动、侧倾控制或扭矩矢量等方面进行单独优化,而是将所有功能集成至一个中央系统,以实现各车载系统的交互,并使其能够利用来自云端的外部输入信号,从而实现提高乘客舒适度和底盘性能、以及优化运行状况、减少维修成本等多种效益。不仅如此,它还可以用来控制主动阻尼系统、主动稳定杆和后轮转向等多个系统。
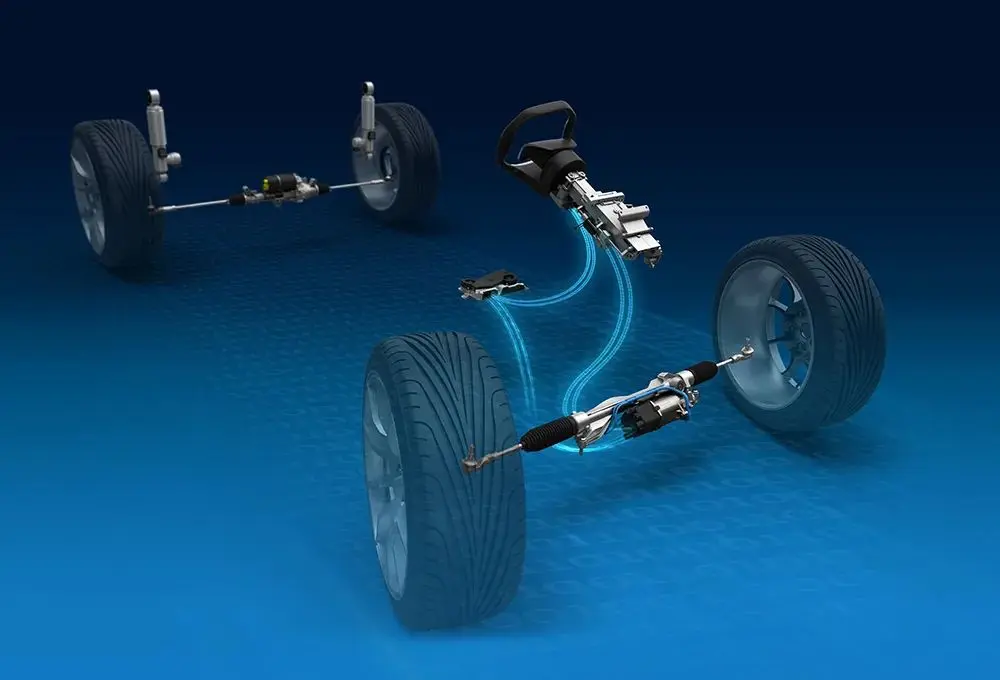
采埃孚认为,正如其cubiX软件平台和底盘2.0概念所展示的那样,一台高性能中央计算机就能控制线控转向系统和所有其他驾驶动态功能。(采埃孚)

采埃孚改装了一辆大众 ID.3,在短距离测试道路道上展示其线控转向系统。(采埃孚)
采埃孚在一条较短的操控测试路线上,利用改装版大众ID.3演示了线控转向系统的功能。在这次演示中,ID.3的前轴上不再配备方向盘、转向柱和转向机,而是只在前桥上配备了一个方向盘(或手轮)。采埃孚线控转向产品组合总监 Jake Morris表示,“线控转向系统可通过小幅度转动方向盘,实现车轮的较大幅度转动。凭借该系统,在更高级别的自动驾驶汽车中,你可以改装方向盘或移动其位置;在L4级及以上的自动驾驶汽车中,甚至可能移除方向盘。不过,在大型车辆中,可能需要将该系统与两个不同的动力装置与后轮转向配合使用。”

采埃孚线控转向产品组合总监 Jake Morris(采埃孚)
ID.3演示车保留了方向盘,而且采埃孚为其设置了三种转向模式:模拟标准机械转向模式、自动适应车速的转向比模式,以及提供180度左右转向角的“轭式转向(steering yoke)”模式。
在自动适应车速的转向比模式下,方向盘的转动幅度变小,因此小幅转动方向盘就能实现前轮的较大幅度转向,从而使泊车和倒车变得更加简单;在汽车高速行驶时,转向比则更接近于传统机械系统。而Yoke转向模式是对这种模式的自然延伸,低速时便于操控,高速时更接近传统转向模式。采埃孚表示,根据迄今为止的测试结果,所有模式都很容易上手。
Harvey Smith是采埃孚电磁设计团队负责人,负责磁性材料和组件(如电机、传感器和电磁阀执行器等)的设计管理工作。他表示,我们多年来一直使用仿真模拟进行设计,而人工智能可以带来更多的可能性。“作为电磁设计工程师,我们密切关注仿真结果,因为它为我们提供了宝贵的信息。随着仿真工具的不断进步,我们可以将其与更多新技术(如AI)结合使用。Smith提到,“传统方案需要预先选择一个传统的拓扑结构,然后再将所有尺寸参数化,利用AI算法确定最佳参数组合,以找到最符合预期的拓扑结构。而我们的新设想是,能否利用AI技术自动分配磁钢和铜的区域分布,然后通过尝试无数的组合方案来进行调整,最终得出我们想要的拓扑结构?”

采埃孚电磁设计团队负责人 Harvey Smith(采埃孚)
他指出,“我个人认为, AI机器人或许可以很好地完成90%的工作,从而找到满足性能要求的拓扑结构。AI机器人能通过经验和模式匹配,分析其数据库中大量不同的电机拓扑结构和尺寸数据,然后据此推荐有关电机极数、槽数和绕组线圈类型的信息,这些信息可帮助你以80%的准确度选择符合要求的电机。当超出AI力所能及的范围时,最后的微调工作或许会采用更传统的技术。”
来源:SAE International













