《越野车辆动力学》系列文章:
越野车的性能——影响越野车性能的参数 已发布
越野车的性能——可变形路面上的车辆动力学 已发布
3.3 平顺性
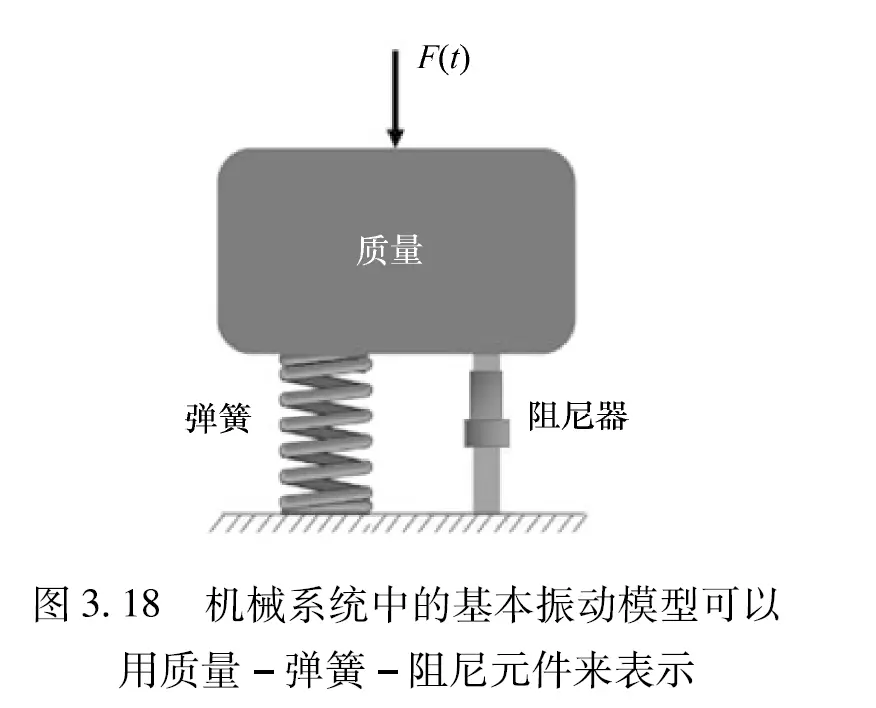
平顺性是指车辆对运行条件的振动响应,与车辆系统的固有频率、道路轮廓和系统特性等参数密切相关。我们可以用质 量-弹簧-阻尼元件来表示机械系统中的 一个基本的振动模型(图3. 18),而根据问题的类型,质拭既可以受力(强迫振动)也可以不受力(自由振动) 的影响。
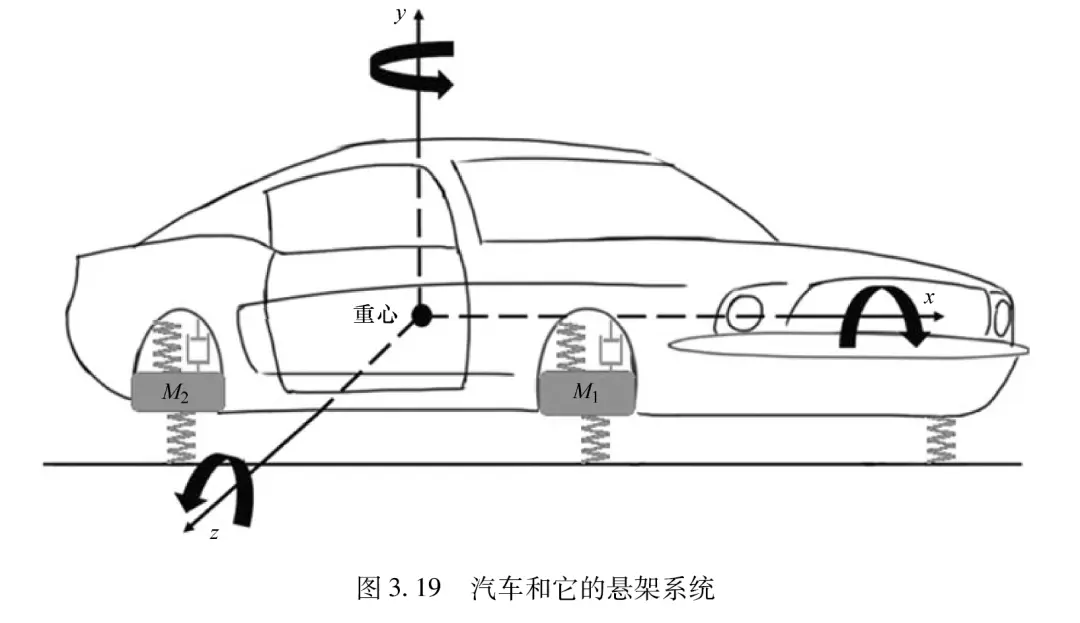
通常可以根据系统特征和问题状况来选择自由度的数目,一个物体在坐标系中可以用六个自由度来表示,横向、纵向和垂向以及绕着三个坐标轴的旋转方向(即偏航、俯仰和横摆),由于车辆系统的限制,常常忽略纵向、横向和偏航方向上的振动。假设车辆的底盘安装在四个车轮上,则经典的越野车可以用七自由度系统来表示,如图3. 19所示。



3.3. 2 自行车模型
行车模型主要是用来处理车身的俯仰和垂直自由度, 通过弹簧/减振器系统对前后悬架进行建模, 更详细的模型还需要考虑到轮胎模型和非线性阻尼, 例如与速度相关的阻尼(回弹时候的阻尼大于压缩时候的阻尼)。汽车的车身具有俯仰和 垂直自由度, 它们在模型中用四个状态量来表示:垂直位移、垂直速度、俯仰角位移和俯仰角速度, 根据牛顿第二运动定律, 力和力矩导致了车身的运动。图3.22表示了车辆的自行车模型悬架系统。
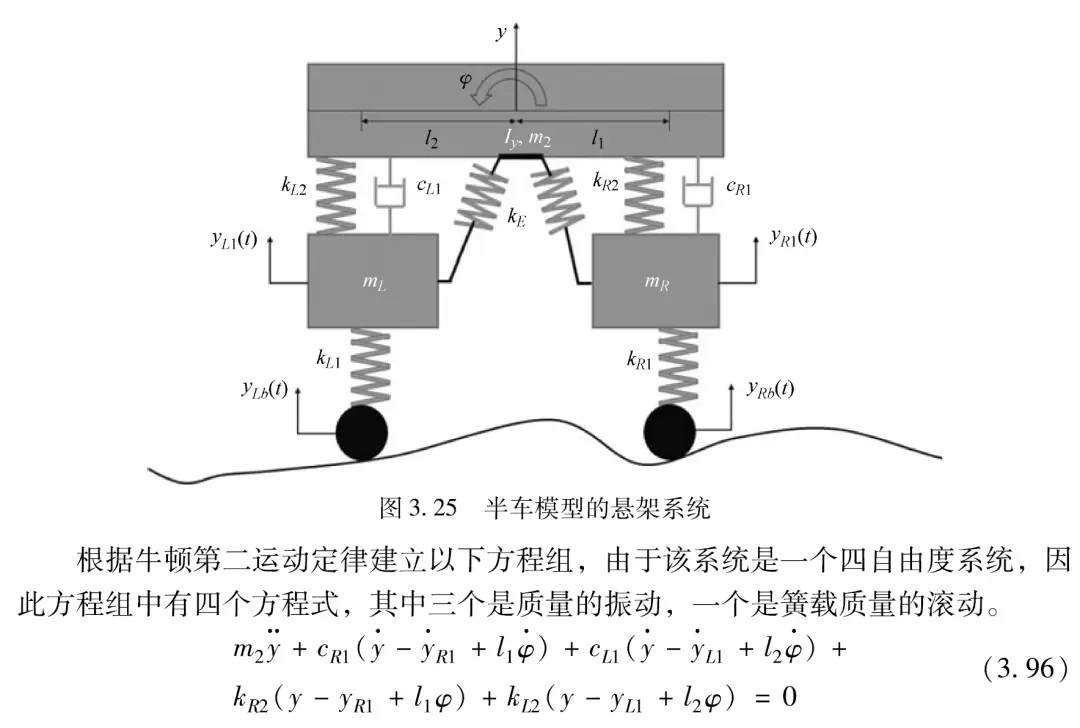
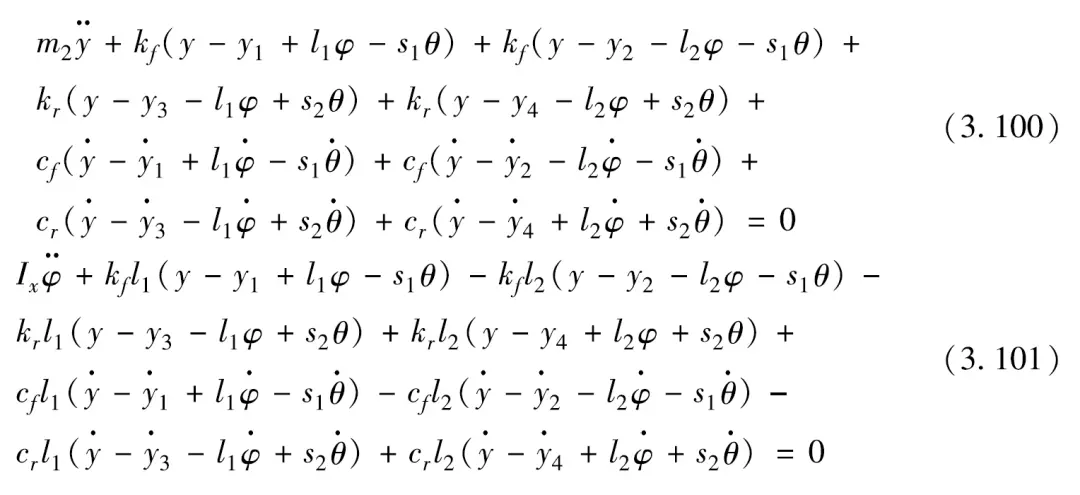
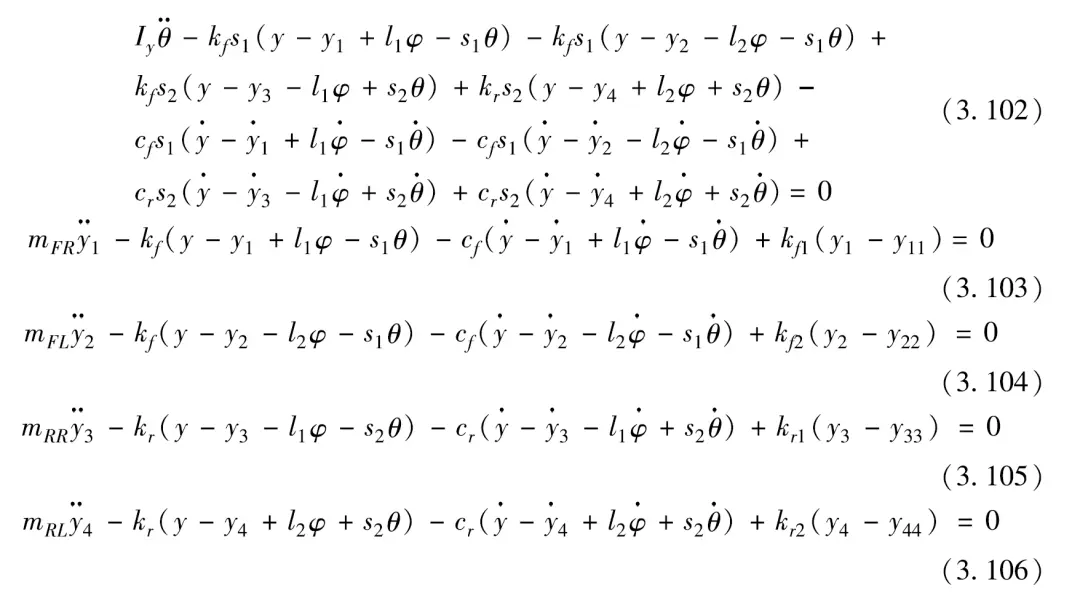
根据牛顿第二运动定律, 可以建立出四自由度系统的运动控制方程如下:
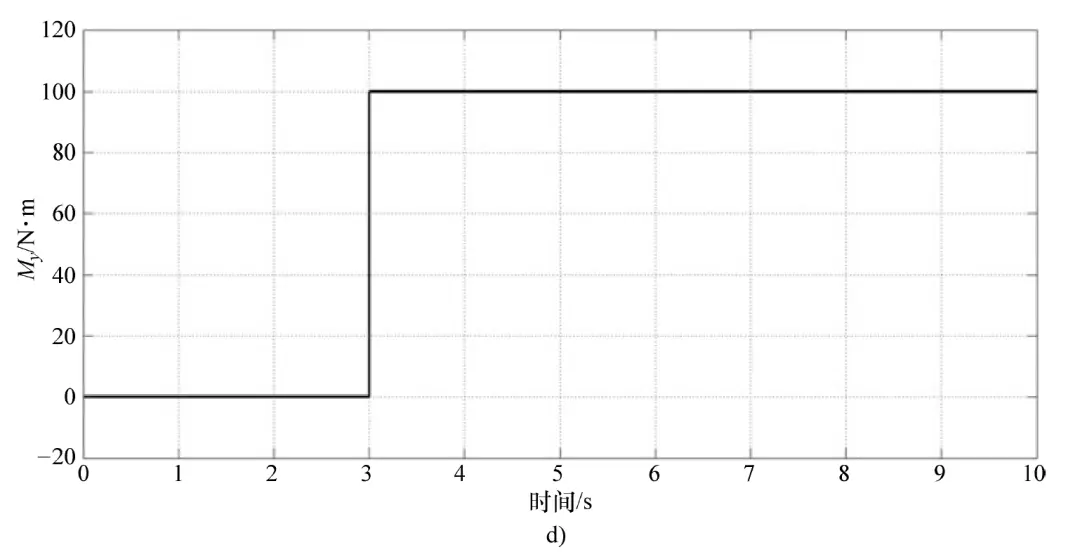
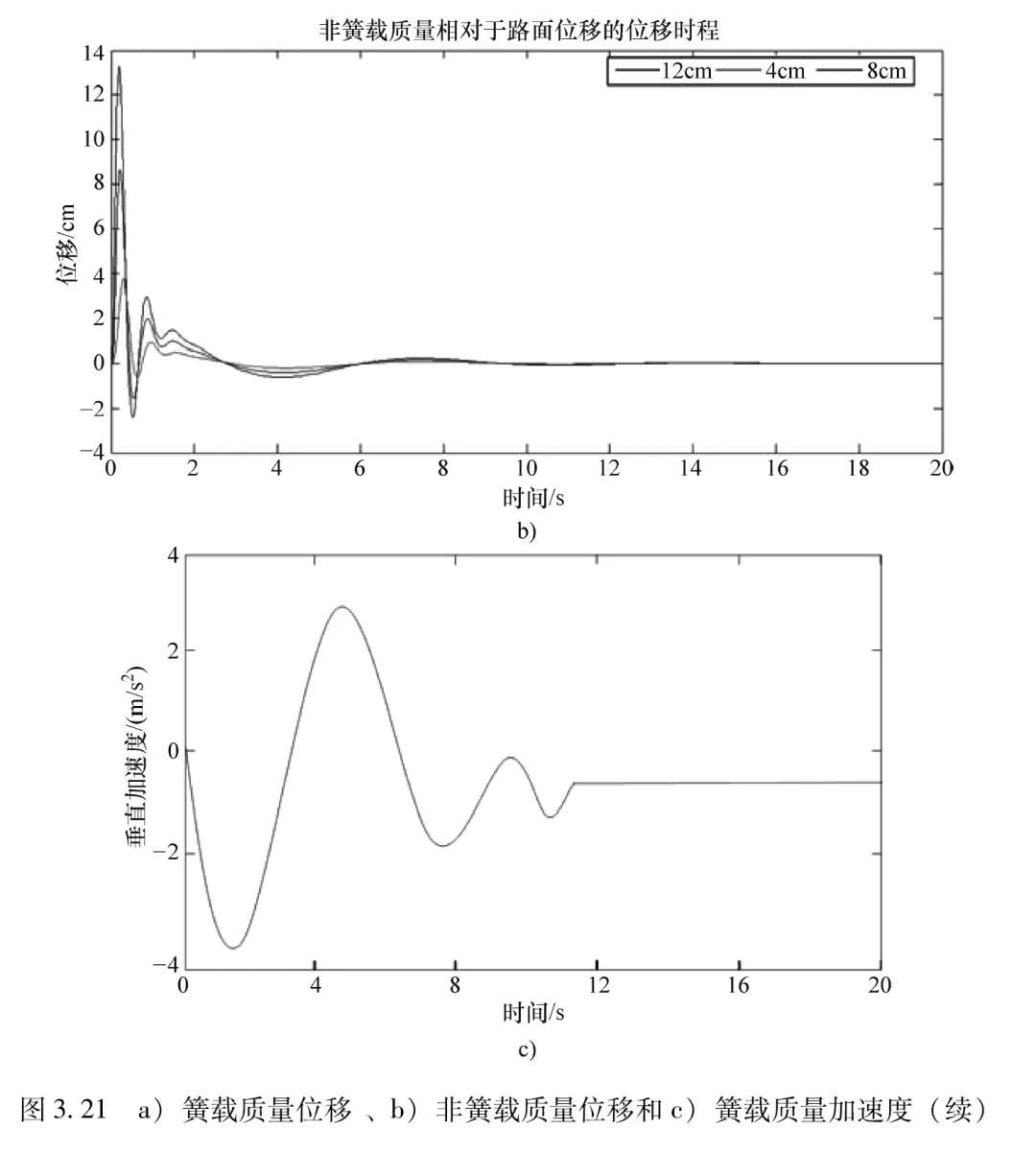
用常微分方程求解器求解出运动方程, 并将阶跃函数作为车辆道路轮廓的一个输入(图3.23), 就可以得到俯仰差的趋势、簧载质量的垂直速度, 以及簧载质量和前部非簧载质量之间的力和由加速或减速产生的动量(图3.24)。

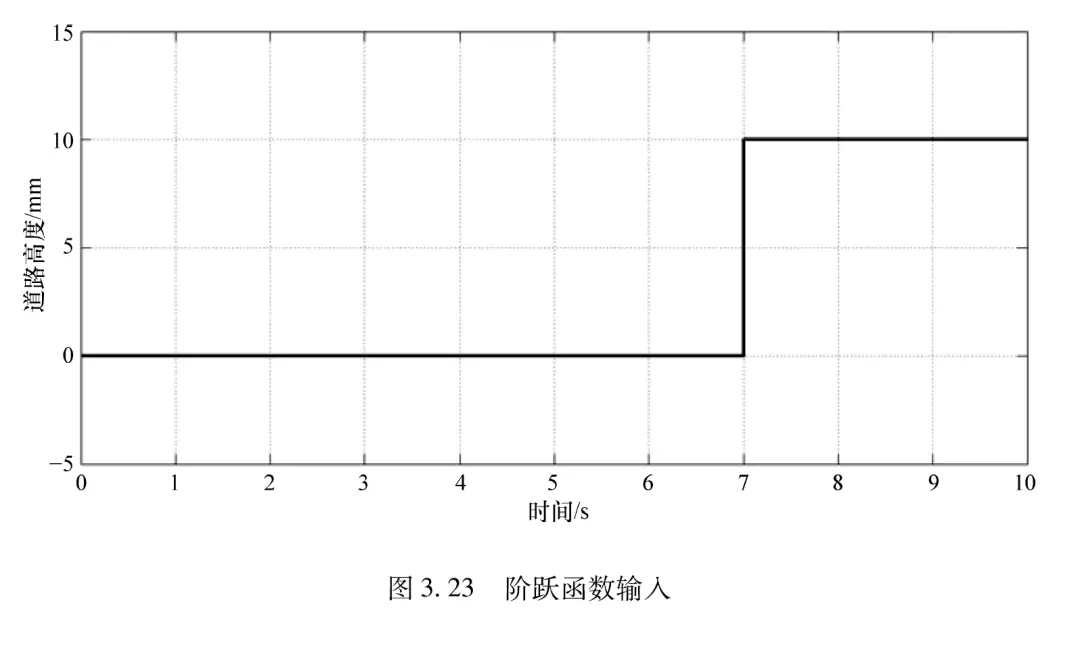
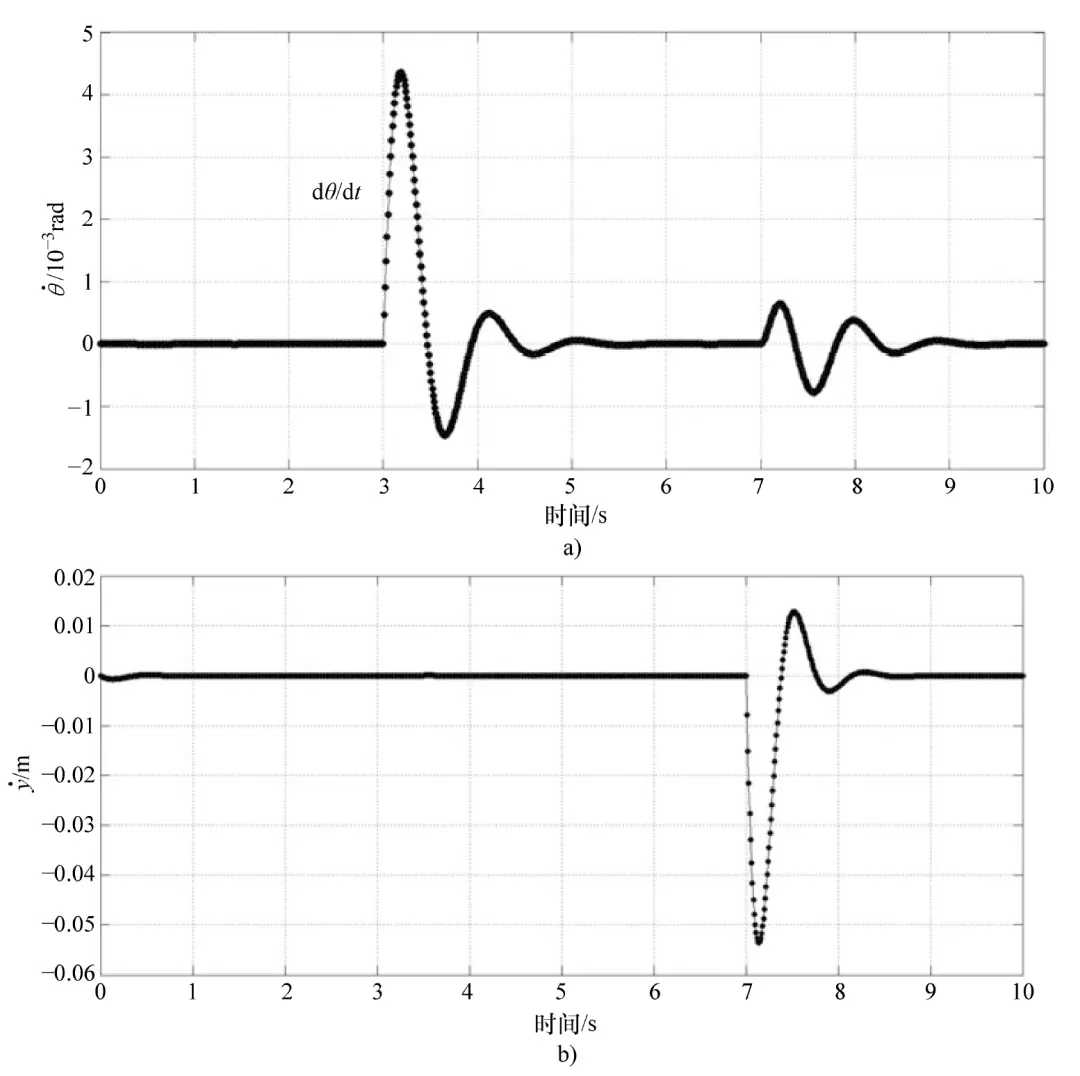
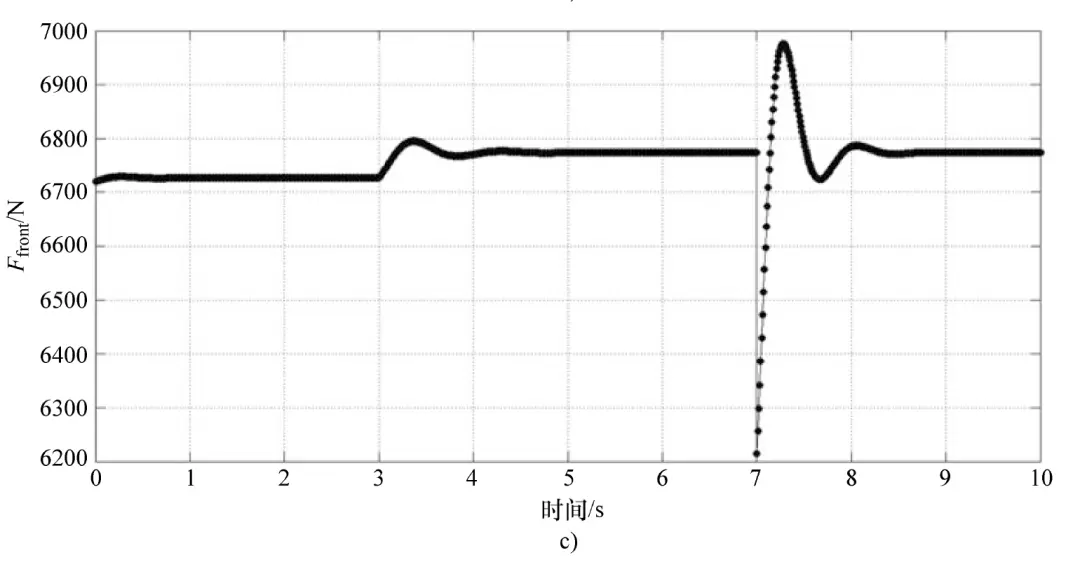
图 3. 24 a)二分之一车辆的俯仰差、 b) 垂直速度、c)簧载质量和前部非簧载质量之间的力 和 d) 由加速或减速引起的动量
图3.24a)二分之一车辆的俯仰差、b)垂直速度、c)簧载质量和前部非簧载质量之间的力和d)由加速或减速引起的动量(续)
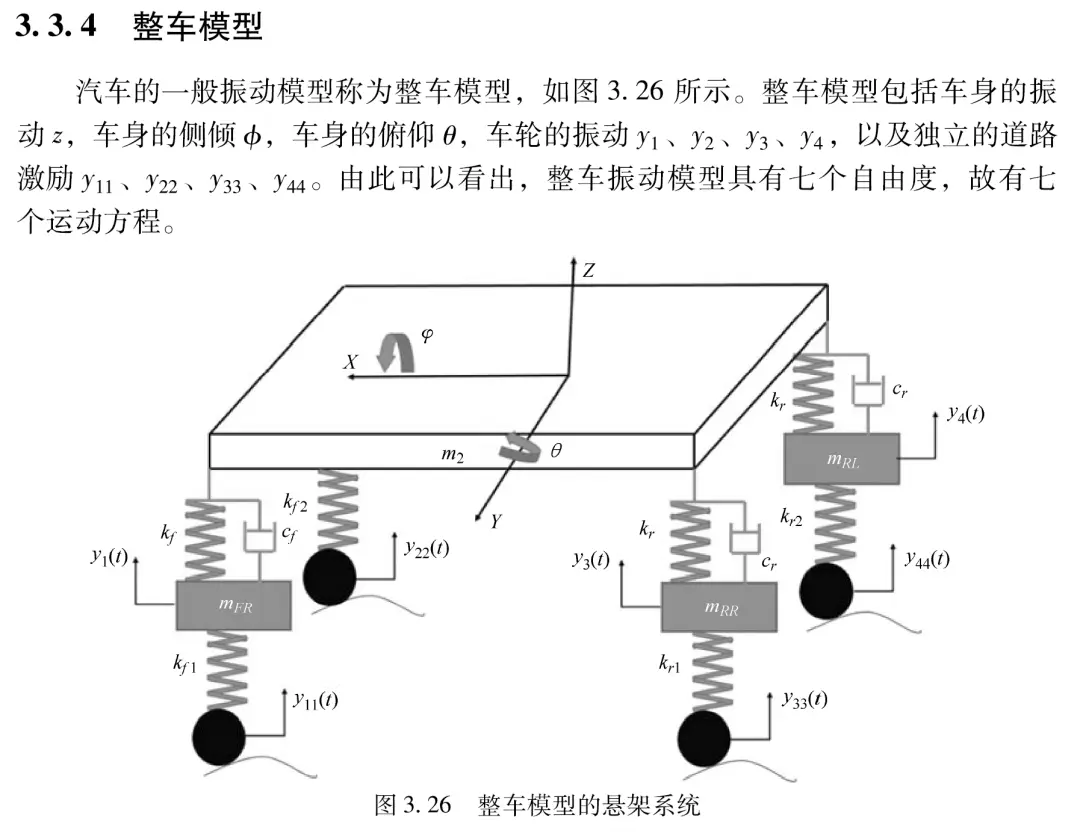
3.3. 3 二分之一车辆模型
二分之一车辆模型与自行车模型类似,其不同之处在于在半车模型中,俯仰运动不再是重点,转而着重研究侧倾运动。半车模型的悬架系统绕y轴转动,如图3.25所示。
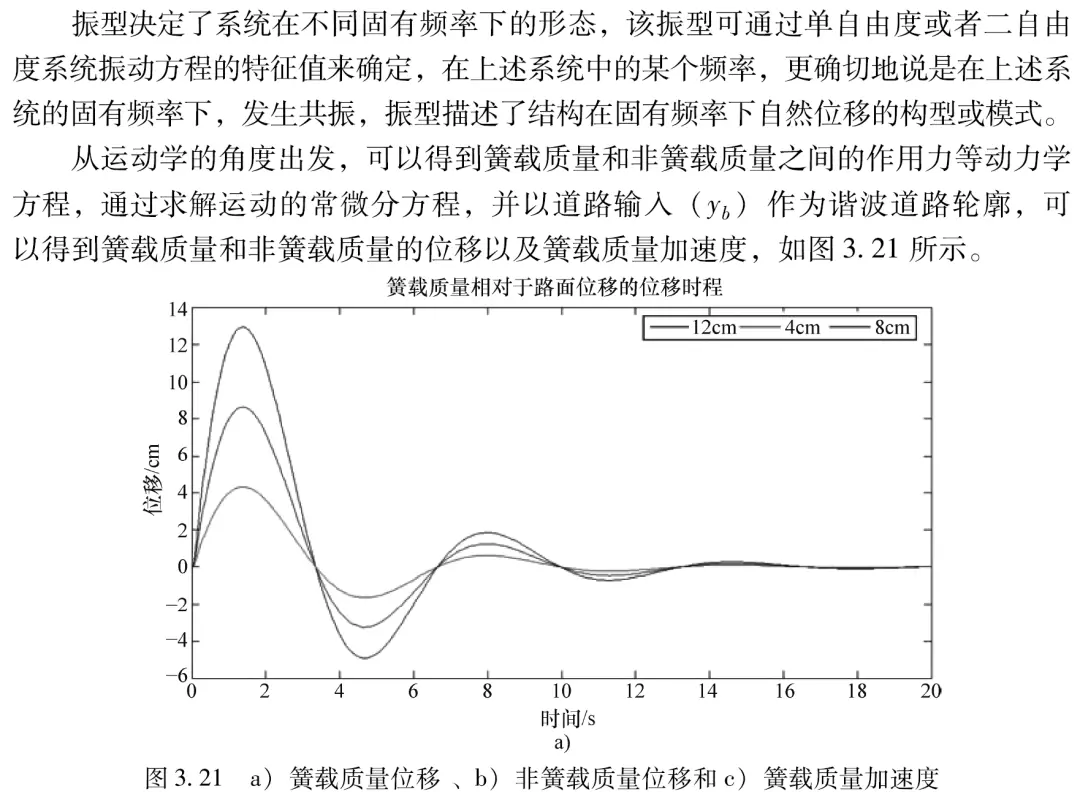
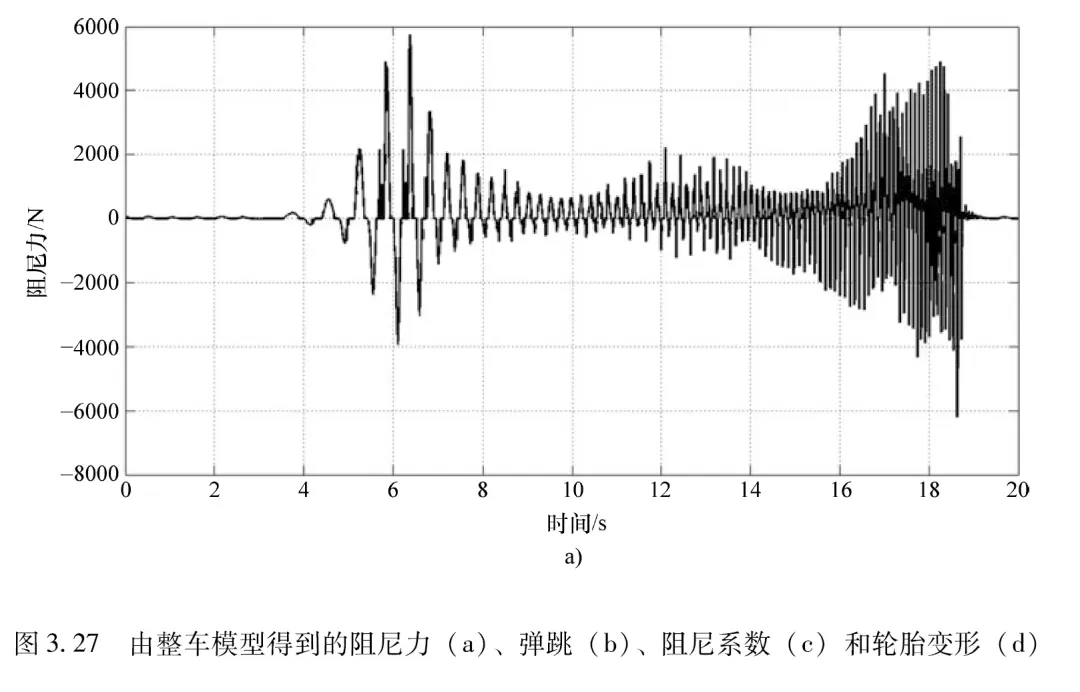
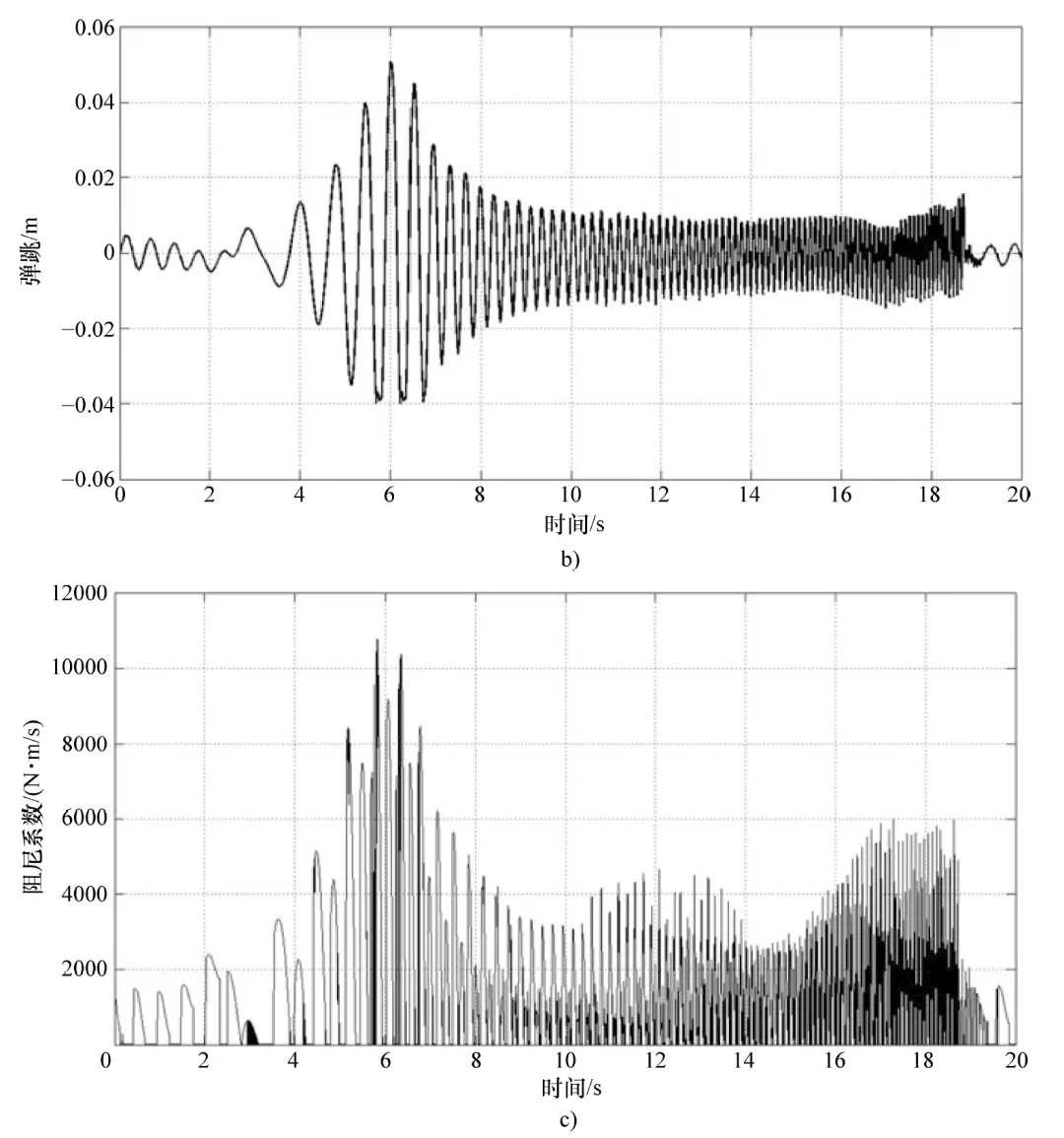
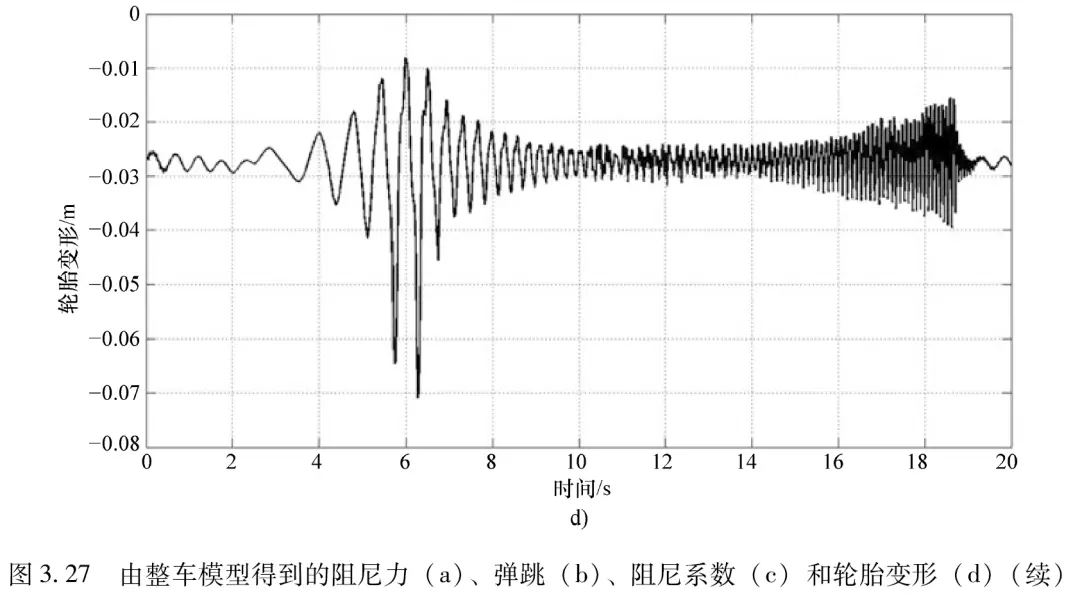
在使用MATLAB等常微分方程求解器解出运动方程后, 可以得到右前轮车轮 的轮胎变形、车轮的弹跳以及阻尼力和阻尼系数(图3.27)。
假定汽车的前后悬架均为独立悬架, 则每个车轮仅有一个垂直位移, 对于实心 轴, 左右车轮构成刚体, 具有滚动和振动, 因此应该相应地修改能量方程和运动方程, 来表示实心轴的振动和滚动。
本文摘编自《越野车辆动力学——分析、建模与优化》,机械工业出版社出版,经出版方授权发布。
《越野车辆动力学——分析、建模与优化》基于机械概念和理论给出了越野车辆系统建模、数学描述和性能优化分析等问题的相关方法,主要目的是较为准确地概述越野汽车的动力学系统。本书首先建立了与车辆的行驶参数能够很好地吻合的数学模型,同时还介绍了高效地对在崎岖不平路面上行驶的车辆进行建模以获得车辆很好性能的方法,以及更快地针对越野车辆进行设计、开发、分析的基本原理。本书有助于读者开发计算机程序,并使用一些最优选的人工智能方法来对越野车辆动力学进行分析、建模和优化。读者可以根据需要选择学习。本书可作为高等院校机械工程、车辆工程、交通运输及相关专业的本科生、研究生教材,也可供对越野车辆感兴趣的研究人员和工程技术人员阅读参考。
来源:汽车测试网













