1.背景
2.范围和定义
3.申请批准
4.批准
5.一般要求
6.DCAS功能的附加要求
7.DCAS运行监控
8.系统验证
9.系统信息数据
10.软件识别要求
11.系统安全要求
12.物理测试要求
13.模拟仿真要求
2.范围和定义
2.1 范围
本UN法规适用于M类和N类车辆的驾驶员控制辅助系统DCAS的型式认证
即使R79中定义的的ACSF功能和RMF功能,也能对车辆同时进行横纵向控制,它们不能通过本法规进行认证。
如果主机厂宣称ACSF或RMF是DCAS的一部分,则本UN法规适用,无论它是否已被R79批准(DCAS有一定门槛,例如需要舱驾融合、需要智能限速、需要在必要时靠边停车等,R79定义的L2功能不能宣称是DCAS)。
NOA要做R79认证还是R171认证?
2.2 定义
就本法规而言:
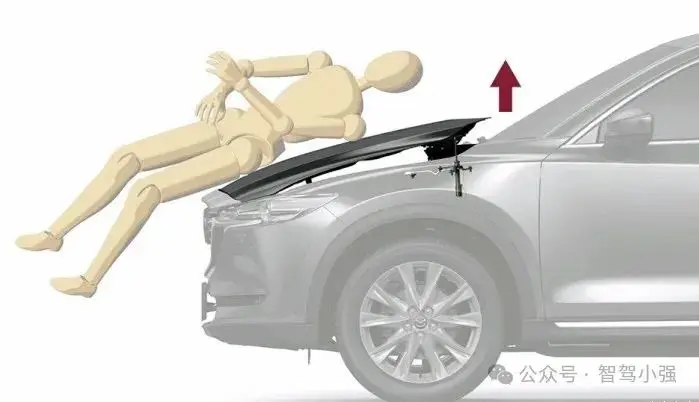
驾驶员控制辅助系统Driver Control Assistance System (DCAS)是指能够帮助驾驶员持续控制车辆纵向和横向运动的硬件和软件。在本UN法规中,DCAS也被称为“该系统”。
关于DCAS的车辆类型Vehicle Type with regard to DCAS是指一组车辆,它们在以下方面没有区别:
(a)DCAS的系统特点及设计;
(b)显著影响DCAS性能的车辆特征。
如果在制造商指定的车辆类型内,DCAS包含多个功能,其中一些功能可能无法安装在某些车辆上,则具有较小功能的DCAS被视为与DCAS属于同一车辆类型(高配覆盖低配)。
(DCAS)功能 Feature是指在定义的交通场景、环境和系统边界内为驾驶员提供帮助的特定DCAS能力。
动态控制Dynamic Control是指实时执行移动车辆所需的操作和功能。这包括控制车辆的横向和纵向运动、监测道路环境、响应道路交通环境中的事件以及为机动进行规划和信号。
就本UN法规而言,只有驾驶员负责车辆动态控制,而DCAS提供协助以执行操作和功能,而不限制驾驶员在任何时间进行干预的能力。
系统边界System Boundaries是制造商制定的可验证、可测量的限制或条件,以及影响系统按预期运行能力的条件,在系统边界条件内,DCAS或DCAS的功能可以为驾驶员提供帮助。
驾驶员脱离Driver disengagement是指DCAS系统判断驾驶员当前无法安全执行感知、规划、决策以及干预DCAS操作。

操纵功能Operational functions是指驾驶员移动车辆和操作其系统所需和采取的基本控制动作,包括对车辆横向和纵向运动的控制。操作功能的实现意味着驾驶员对车辆的物理操作。(短时/瞬间)
战术功能Tactical functions是指驾驶员对机动的实时规划和确定。战术功能意味着驾驶员根据不断变化的驾驶环境实时操作车辆的技能(决策)。
「「当你决定开车走某条路线去公司时,在驾驶过程中,你会根据途中遇到的各种条件做出战术决策(例如超车、变道或转向另一条道路)。
在变道时,你会进行战术评估(例如:目标车道是否有车、是否是禁止变道的实线、是否有车正在向目标车道变道等)。
最终确定变道是可行的后,你会在操纵层面上进行持续调整(例如:启动转向灯,在保持适当速度的同时转动方向盘),最终完成变道。
操纵层面涉及车辆稳定控制能力(例如,对转向、制动和加速等进行微调以使车辆保持在车道中间位置,顺利通过弯道、冰面等)。
操纵功能包括但不限于横向车辆运动控制(转向)和纵向车辆运动控制(加速和减速)。这种操作往往涉及瞬间反应,例如在驾驶时进行微修正。」」
实时Real-time是指过程或事件发生的实际时间。
机动Manoeuvre是指车辆轨迹的变化,导致车辆至少部分离开其原始车道或行驶方向,从而可能导致与其他道路使用者的互动。一系列机动可以被视为单个机动动作,前提是这些机动动作连续进行,没有明显的间隔,并且与完成一个战术目标有关(例如,跟随导航改变车道进匝道)。与导航路线有明显间隔的不同机动动作不被视为单个机动动作。
目标车道Target Lane是指系统打算通过执行机动将车辆转移到的车道。
变道程序Lane Change Procedure(LCP)是指执行车辆变道的操作序列。该序列包括以下操作:
(a)方向指示灯的激活;
(b)车辆向车道边界的横向移动;
(c)变道机动LCM;
(d)恢复车道内车辆的稳定位置;
(e)方向指示灯停用。
变道机动Lane Change Manoeuvre(LCM)是LCP的一部分:
(a)当车辆前轮轮胎最外缘穿过车辆正在操纵的车道标记的外缘时开始;
(b)当车辆后轮完全越过车道标记时结束。
关闭模式Off mode是指DCAS运行状态,当系统被阻止协助驾驶员执行车辆的动态控制时的状态。
开启模式On mode是指DCAS运行状态,当系统或DCAS功能被请求为驾驶员执行车辆动态控制提供帮助时的状态。在这种模式下,系统处于“待机stand-by”或“激活active”模式。
激活模式Active mode是指DCAS运行状态,当DCAS系统或DCAS功能认为自己在其系统边界内并为驾驶员执行车辆的动态控制提供帮助时的状态。
待机模式Stand-by mode是指DCAS运行状态,DCAS系统或DCAS功能处于“开启”模式,但不产生控制输出。在这种模式下,系统可以处于“抑制passive”或“非激活inactive”模式。
抑制模式Passive mode是指DCAS运行状态,当DCAS系统或DCAS功能处于“待机”模式并认为自己在其系统边界内,没有任何先决条件阻止切换到“激活”模式时。
非激活模式Inactive mode是指DCAS运行状态,当DCAS系统或DCAS功能处于“待机”模式并认为自己在其边界条件之外或任何先决条件(如驾驶员脱离、车辆故障)是防止切换到“激活”模式时。
紧急碰撞风险Risk of imminent collision描述了一种情况或事件,即低于5m/s²的减速度不能避免车辆与另一个道路使用者或障碍物发生碰撞。
检测范围Detection Range是指系统能够可靠识别物体的距离,并产生控制信号,需充分考虑感知系统组件的性能在车辆整个生命周期内由于时间和使用而恶化。
系统/功能设计速度范围System/Feature Designed Speed Range是指考虑到相关的交通和环境条件,DCAS系统或其功能可以根据系统设计和能力处于“激活”模式的自适应速度范围。
驾驶员设定的最大速度Driver-set maximum speed是指驾驶员设定的DCAS运行的最大速度。
当前最高速度Current maximum speed是指系统将控制车辆的最大速度。
R171软件识别号R171 Software Identification Number(RXSWIN)是指由车辆制造商定义的专用标识符,代表电子控制系统(DCAS)的型式认证相关软件的信息。
汽车软件识别码RxSWIN都要强制了,你还不知道是啥么?
电子控制系统Electronic Control System是指旨在通过电子数据处理,产生所述车辆控制功能的单元组合。此类系统通常由软件控制,由传感器、电子控制单元和执行器等离散功能组件构建,并通过传输链路连接。它们可能包括机械连接、电-气连接或电-液连接。

事件Occurrence在第7章的规定中,涉及DCAS车辆的与安全有关的行动、事件或即将发生的事件。
安全-关键事件Safety-Critical Occurrence是指在碰撞事件发生时,DCAS或其相应功能处于“开启”模式时发生的事件:
(a)导致至少一名需要医疗援助的人受伤;或
(b)导致DCAS车辆部署的安全气囊、不可逆转的乘员约束或弱势道路使用者保护系统开启。
可控性Controllability是指在危险情况发生时可以避免伤害的概率。这种情况可能是由于驾驶员、DCAS系统或外部措施的行动造成的。
驾驶员超控Driver Override是指驾驶员通过应用制动、变速器、油门或转向控制来暂时干预DCAS提供的辅助的任何行动。
高速公路Highway是指一种禁止行人和骑自行车的道路,其设计配备了物理隔离,将相反方向的交通分开。
非高速公路Non-Highway是指上文定义的高速公路以外的道路类型。
自动驾驶系统Automated Driving System(ADS)是指能够持续执行整个动态驾驶任务(DDT)的车辆硬件和软件。
动态驾驶任务Dynamic Driving Task (DDT)是指在道路交通中操作车辆所需的实时操作和战术功能。
弦不稳定String Instability是指前车受到干扰后速度波动,这个波动被后车放大。
动手请求Hands On Request(HOR)是指系统向驾驶员发出的手重新参与驾驶任务的请求。(脱手报警)
注视请求Eyes On Request(EOR)是指系统向驾驶员提出的视觉重新参与驾驶任务的请求。(脱眼报警)
不直接控制报警Direct Control alert(DCA)是指系统向驾驶员发出的指示,要求驾驶员至少立即恢复对车辆的横向控制。
3.申请批准
3.1
根据《1958年协定书》附表3的规定,车辆制造商或制造商授权代表应向缔约方的型式批准机构提交与DCAS有关的车辆型式批准申请。
3.2
型式批准申请应附有以下留档:
关于DCAS的车辆类型的描述,以及本法规附件1中要求的留档包,该包可以访问DCAS的基本设计、DCAS与其他车辆系统连接的方式,以及DCAS直接控制输出变量的方式。
3.3
代表待批准车辆类型的车辆应提交给型式批准机构或其指定的负责进行批准测试的技术服务部门(送测)。
4.批准
4.1
如果根据本UN法规提交审批的车辆类型符合下文第5至10段的要求,则应批准该车辆类型。
4.2
应为每种批准的类型分配一个批准编号。其前两位数字(UN法规的原始形式为00)应表示包含批准发布时对UN法规所做技术修改的一系列修改。同一缔约方不得为另一种类型的车辆分配相同的编号。
4.3
应通过符合本联合国法规附件1中格式的表格以及申请人提供的格式不超过A4(210×297mm)、适当比例尺或电子格式的文件,向使用本联合国法规的协议缔约方传达包括批准、扩项、拒绝、撤销认证或最终停产车型在内的信息。
4.4
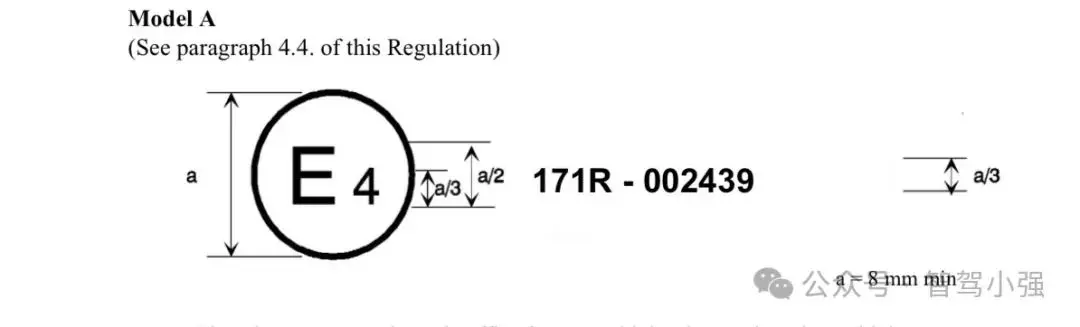
每辆符合根据本UN法规获批准的车辆类型的车辆,须显著地并在批准表格上指明的易于到达的地方,贴上符合附件2所述型号的国际批准标记,该标记包括:
4.4.1 围绕字母“E”的圆圈,后跟:
(a)已批准的国家的编号;和
(b)本法规的编号,后跟字母“R”、破折号和本段规定圆圈右侧的批准编号。
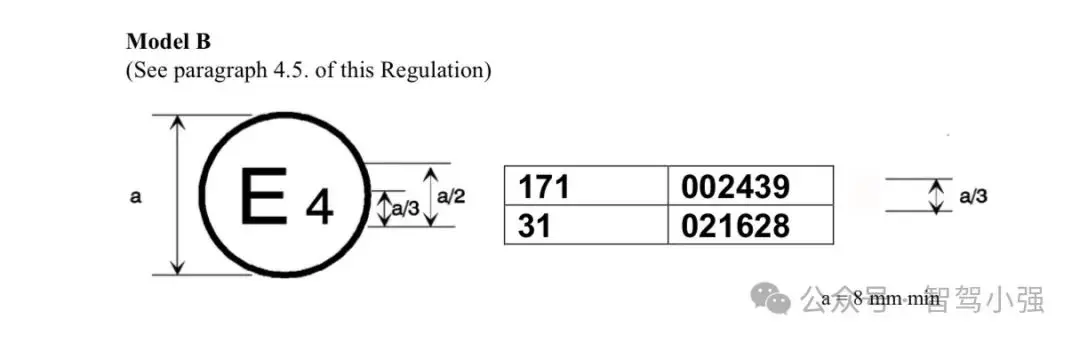
4.5
批准标志应清晰易读且不易磨削。
4.6
在型式批准之前,型式批准机构应核实制造商是否存在令人满意的安排,以确保对车辆生产的符合性进行有效检查。(即CoP一致性审查)
来源:智驾小强













