2025 年 4 月,ASAM OpenODD 1.0.0历经接近三年的制定和审查,目前已正式发布。欢迎ASAM会员与行业专家查阅与使用。

ASAM OpenODD标准介绍
ASAM OpenODD 规定了一种建模方法和交换格式,用于指定和描述自动驾驶系统的运行设计范围 (ODD,Operational Design Domain)。 此外,该规范还包括运行范围 (OD)、当前运行范围 (COD,Current Operational Domain) 和目标运行范围 (TOD,Target Operational Domain) 的建模。
ASAM OpenODD提供了一种技术独立的数据模型(采用 UML语言),定义了分类法和相关概念的结构和相互连接方式,并详细说明了这些元素如何表示和交换。
ASAM OpenODD标准支持多种机器可读格式,包括YAML、表格格式(CSV、spreadsheet)和 ASAM OpenSCENARIO DSL等。为了进一步加强互操作性,该标准能够将以任一种格式(例如 YAML)定义的 ASAM OpenODD 规范转换为其他格式(例如电子表格)。为了支持详细的评估和合规性,它能够指定 ADAS、DCAS 或 ADS 设计运行的确切条件。
ASAM OpenODD模型的关键组成部分包括用于表示ODD概念的分类法和用于包含或排除特定环境条件的模块化规则。为了确保和纠正跨语言的明确解释,它支持多语言翻译。ASAM OpenODD通过提供一个一致的框架来模块化地表达条件,从而解决定义复杂ODD的挑战,从而能够创建可扩展的、机器可读的和人类可读的描述。
ASAM OpenODD旨在直接补充其他 ASAM 标准,特别是来自 ASAM OpenX系列的标准。 使用同一种语言描述场景和 ODD 的可能性降低了在基于 ODD 的测试工作流程中使用该标准的门槛。
ASAM OpenODD标准案例分析
ASAM OpenODD致力于形成一套可被机器阅读的描述语言格式,通过明确在仿真以及其他可被机器处理的环境,匹配目前存在的各种抽象的设计运行域的描述内容。通过设定此种语言,达到以下的相应需求:
此项标准与ISO 34503 《道路车辆-自动驾驶系统测试场景-设计运行域》有着一定的关联。ISO 34503 专注于人类可读性,ASAM OpenODD 更多关注机器可使用性。此项标准针对ASAM的基于场景的测试流程,为提供边界条件以及测试的覆盖度提供支持。
针对具体的语言使用方式,本文提供两个具体的案例,案例1如下图所示:
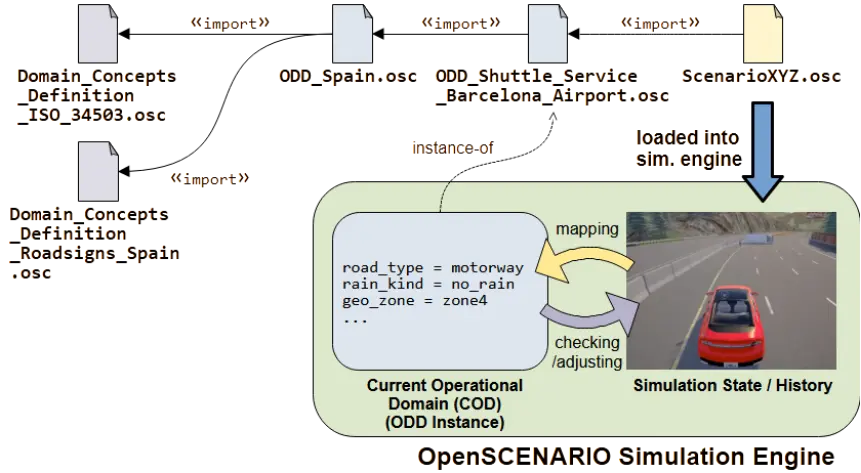
在这个具体案例中,一个ASAM OpenSCENARIO DSL 的场景文件被执行,同时会在系统中载入一个当前被测环境的ODD文件,ODD_Shuttle_Service_Barcelona_Airport.osc。
这个文件中是有当前测试整体的ODD环境文件生成或者复制,保证被测内容在当前环境下的ODD参数,在这里,针对西班牙的特定ODD文件被指定,这里是所有符合西班牙环境下的ODD文件,ODD_Spain.osc。此文件是由基于ISO 34503 的设计运行域所指导生成,具备统一的生成分类方法。
在这个执行条件下,一种验证的应用方式是通过执行相应的ODD定义,去验证例如在所有的ODD范围内,自动驾驶车辆是否有效地执行自动驾驶功能,或者当设计的条件超出了运行边界,自动驾驶车辆是否执行了离开ODD范围时的有效接管操作。
另一种应用状况是当车辆的设计运行域处于特定的地理信息中。当车辆驶出此区域,则需要进行特定的接管等,如下面案例2所示:
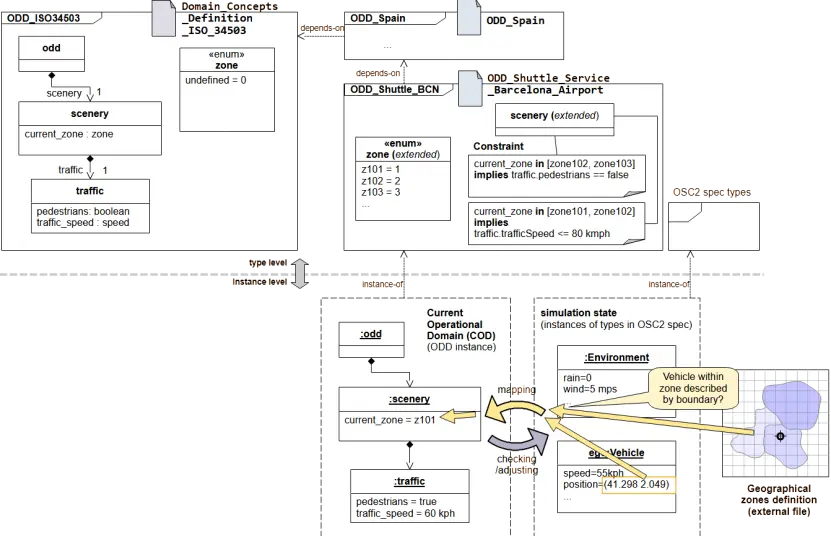
案例2中,通过地理信息限定了两个ODD约束条件:
(1)行人不允许进入区域102 & 103;
(2)车辆在区域102 & 103中的速度不得超过80公里/小时
通过验证以上的ODD条件以及运行状态,对于车辆的状态以及当前自动驾驶的状态进行评估。
来源:C-ASAM组织