在当今节奏快速、交通复杂的驾驶环境中,来自各个方向的安全保障变得尤为关键。尽管大多数驾驶员在日常行驶中更关注如何避免前方碰撞,但事实上,后方追尾事故的发生率同样高企,且多发生在减速、排队、停车等低警觉场景下,极易造成车辆损坏甚至人员伤害,特别是在城市拥堵路段和高速公路出入口区域。
为应对这一潜在安全隐患,现代汽车技术不断演进,引入后方碰撞预警系统(RCW,Rear Collision Warning)。该系统通过融合高精度传感器(如后角毫米波雷达或高清摄像头)与智能识别算法,能够实时监测车辆后方动态区域,一旦识别到有其他车辆或移动物体以较快速度逼近本车,便会发出多模态警报提醒驾驶员,提前做出规避准备。
01、功能定义
后方碰撞预警(RCW)是一种主动安全辅助功能,旨在在车辆处于前进挡(非倒挡)状态下,及时识别从车尾方向靠近的潜在碰撞威胁物体,并向驾驶员发出警告,协助其提前采取规避措施,从而降低追尾事故风险。
1.1 硬件组成与安装位置
后角毫米波雷达传感器:
通常为24GHz或77GHz波段的短程/中程毫米波雷达。
装于车辆后保险杠内侧的左右角位置,分别监控车辆后方左后与右后区域。
安装位置需精确校准,以避免盲区和误判。
中央控制单元(ECU):
负责雷达数据的接收、解析、目标跟踪、风险评估与警报触发。
通常与车辆的ADAS域控制器或车身控制器进行集成。
HMI人机交互装置:
包括仪表盘警示灯、中央显示屏弹窗、声音蜂鸣器或方向盘震动模块等。
可配置多种报警级别与反馈形式,增强用户感知。
1.2 工作原理与识别逻辑
启动条件:
车辆处于非倒挡状态(即前进挡 P/N/D/S 等)。
点火电源(IG)接通,即IG ON。
系统默认出厂启用,但部分车型允许通过车辆设置界面进行手动启停设置。
探测逻辑:
雷达以固定周期发出电磁波脉冲,接收后方反射信号,获取目标物体的距离、相对速度、角度等信息。
结合多帧信息,对目标物体进行识别、跟踪与路径预测。
目标识别:
能够识别包括汽车、自行车、摩托车、电动三轮车等不同类型的移动物体。
系统不对静止物体(如路边柱子、墙面、路牌)触发警报,以减少误报。
危险等级评估:
综合考虑以下参数进行碰撞风险分级:
相对速度(来车越快风险越高)
目标距离(越近越危险)
交汇时间(TTC):Time to Collision
目标角度(靠近主车轨迹时风险升高)
通常将风险等级划分为低、中、高三个级别,对应不同的警示方式。
1.3 后方碰撞预警的优势
后方碰撞预警功能提供了多项显著好处,是提升行车安全的重要助手:
增强后方感知能力:系统能有效提醒后方来车,显著降低追尾事故的风险。
提升驾驶员反应效率:视觉与听觉的双重警告,有助于驾驶员集中注意力并采取预防措施,如拉开车距或变道避让。
缓解驾驶压力:尤其在高速或拥堵路段,知道有系统在持续监测后方交通情况,能有效缓解驾驶焦虑感。
值得一提的是,随着智能硬件的普及,RCW系统正被越来越多地集成至先进行车记录仪中,实现前后监控一体化。通过AI芯片对视频数据或雷达数据的实时分析,该系统不仅可以识别后方汽车,还能区分电动车、自行车、摩托车等不同类型的目标,有效减少误报或漏报现象,为驾驶员在倒车、排队等待或临时停车时提供更精准的安全感知能力。

想象你正在高速公路上行驶,前方车流突然减速。你及时减速,但后方一辆车未注意到状况,仍高速驶来。此时,后方碰撞预警系统迅速识别接近的车辆,并在行车记录仪上显示视觉警告,同时发出声音提醒。你立刻检查周围情况并采取应对措施,成功避免一次可能的事故。这个现实例子说明了RCW系统在日常驾驶中的实际价值和关键作用。
02、RCW相关参数介绍
2.1 RCW监测区域
监测区域是一个底边为2米,角度为8°,高为16 米的梯形,并在末端延伸一个长度为15 米,宽度为6.497 米的矩形区域。 RCW系统通过车尾两侧的角雷达(Rear Side Radar)对后方进行区域扫描和目标检测。根据其探测逻辑与硬件参数,RCW的监测区域形状由两个部分组成:
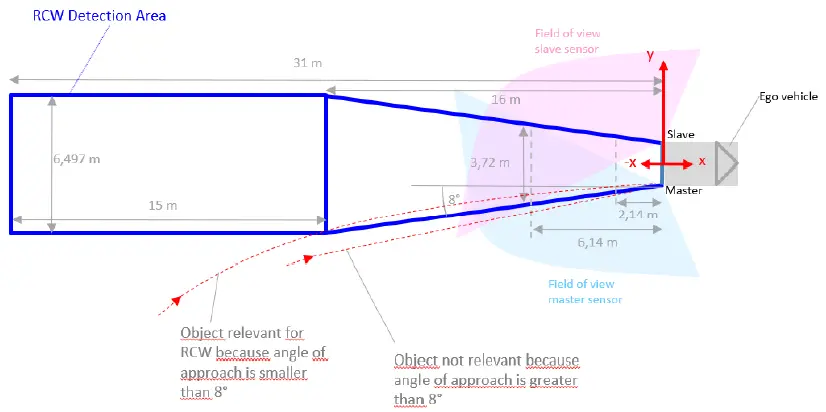
梯形主检测区
底边宽度(贴近车辆侧面):2 米;
视角范围:8°,角度8°含义:代表系统对相对主车行驶方向夹角小于8°的来车目标具备探测能力,涵盖大多数同向或轻微角度偏差的后方车辆;
纵深距离:16 米;
形状描述:以车辆尾部为基准向后展开的等腰梯形区域,用于监测靠近本车行驶方向的追尾风险目标;
尾端扩展矩形检测区
纵深:从梯形末端向后延伸 15 米;
宽度:6.497 米;
形状:矩形;
作用:主要用于补充后方更远距离的探测能力,提前识别高速接近目标并提升系统预警时间,尤其在高速工况下更为关键。
雷达安装角对监测区域的影响
RCW系统依赖安装在车辆左右后角(左后和右后侧)的两个角雷达传感器。每个雷达以约 45°安装角(相对于车身中心线)进行安装,使其同时具备侧向与后向探测能力。该安装方式对监测区域形成如下特点:
距离X方向
覆盖情况说明
x < 2.14 m
盲区区域:两个雷达的波束在此区域无法有效重叠,存在视野缺失,属于RCW功能的最小有效探测距离限制区;此处目标存在无法被及时识别的风险,尤其在超近距离情况下,依赖其他系统(如倒车雷达)协同辅助。
2.14 m < x < 6.14 m
部分覆盖区域:此段区域左右两个角雷达的视野逐步重叠,可能出现只被单侧雷达探测的情况,对目标位置及运动方向判断精度相对较低;系统将通过融合算法进行补偿判断。
x > 6.14 m
完全覆盖区域:此处雷达视野已充分重叠,可实现双雷达协同监测,目标识别准确度、横向定位能力和速度估算能力最强,为RCW系统主要依赖区域。
注:上述 x 方向定义为以车尾中心线为原点,向两侧横向延展的距离,结合雷达朝向定义的雷达坐标系换算而来。
RCW的监测区域设计充分考虑了实际应用中对后方追尾威胁目标的探测需求。其采用梯形+矩形的组合区域实现近距离与远距离的兼顾,同时借助两个后角雷达的协同工作,提升探测准确率与预警及时性。然而系统也存在一定盲区与环境限制,需结合其他感知系统(如摄像头、超声波雷达等)形成更为完整的后向安全防护能力。
2.2 碰撞时间TTC
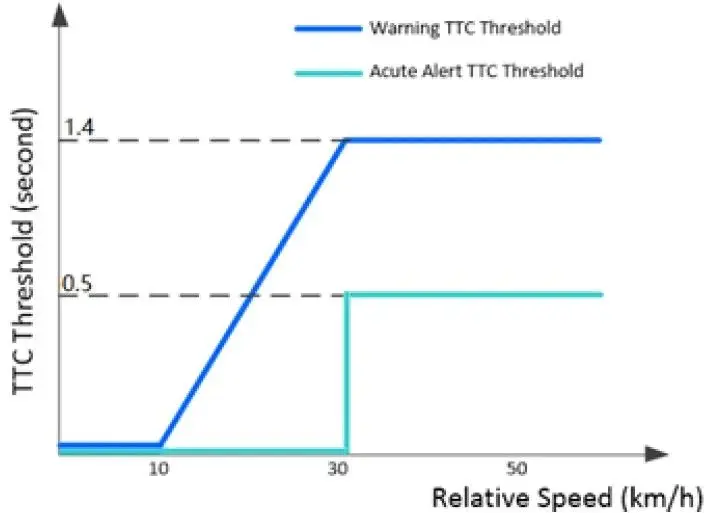
TTC 是指目标物体(如后方车辆)在当前运动状态下,与本车之间在Y轴方向(车尾垂直方向)发生碰撞所需的时间。它反映了潜在追尾碰撞的紧迫程度,为RCW(后方碰撞预警)核心判据之一。
RCW报警判据逻辑(基于TTC与相对速度)
RCW 系统将根据 TTC 与目标相对速度(Vx_impact)联合判断报警等级,分为 一级报警(预警) 与 二级报警(紧急预警)。
一级报警逻辑
一级报警主要用于提示驾驶员注意后方目标快速接近,具备一定预留时间。判定条件:
条件范围
TTC 阈值
Vx_impact > 30kph
TTC ≤ 1.4s
10kph < Vx_impact ≤ 30kph
TTC ≤ 对应速度映射的阈值
Vx_impact ≤ 10kph
不触发报警
二级报警逻辑
二级报警用于提示存在迫在眉睫的碰撞风险,通常用于激活更强等级的安全预警措施(如仪表红色闪烁、蜂鸣提示或V2X上报)。判定条件:
条件范围
TTC 阈值
Vx_impact > 30kph
TTC ≤ 0.5s
Vx_impact ≤ 30kph
不触发报警
补充说明:二级报警严格限制为高速强碰撞风险场景,避免在拥堵或低速尾随中引发误警;
0.5s 为系统容许的最小响应时间窗口,考虑到ECU计算、报警生成、驾驶员反应等链路延时。
典型工况示例分析
场景描述
目标车速
相对速度 Vx_impact
距离 D_y
估算TTC
报警等级
高速追尾风险
120 km/h vs. 80 km/h
40 km/h ≈ 11.1 m/s
15 m
1.35 s
一级报警
高速迫近
130 km/h vs. 90 km/h
40 km/h ≈ 11.1 m/s
5 m
0.45 s
二级报警
拥堵跟车慢行
15 km/h vs. 10 km/h
5 km/h ≈ 1.39 m/s
4 m
2.88 s
无报警
中速稳定跟车
80 km/h vs. 65 km/h
15 km/h ≈ 4.17 m/s
10 m
2.4 s
一级报警
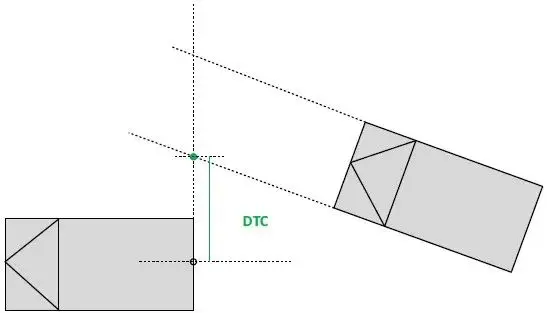
2.3 碰撞距离
DTC 定义及引入背景
在RCW系统中,仅依赖碰撞时间(TTC)作为触发报警的唯一依据,在某些特殊工况(如相对速度极小但距离过近)下,可能导致误报/漏报问题。因此引入碰撞距离 DTC(Distance To Collision),作为对 TTC 的有效补充。
DTC用于表示:在当前运动状态下,目标车相对主车的预测碰撞点与主车尾部的最小间距。
DTC 的物理意义
DTC 并非简单的当前两车纵向间距,而是指在目标车沿其预测轨迹行驶过程中,其假定与主车相撞的未来位置点与主车尾部的空间位置之间的最短距离。
DTC 趋近于0,意味着:若两车不改变当前行驶状态(加速度/转向不变),将在主车后部附近发生物理接触;当 DTC ≤ 某一安全阈值(如0.9m),系统应判定为强碰撞风险。
DTC 与 TTC 的关系与互补机制
指标
含义
优势
局限
TTC(碰撞时间)
与主车尾部在垂直方向上的相撞所需时间
强调时间维度,适合高速工况
在相对速度低但距离近场景可能失效(TTC趋近无穷)
DTC(碰撞距离)
预测碰撞点与主车后部的最小物理间距
强调空间维度,适合低速跟车、缓慢倒车等
忽略速度差时可能过于敏感
因此,RCW系统需将 TTC 与 DTC 联合判断,可采用如下触发逻辑:
当 TTC ≤ 阈值 且 DTC ≤ 阈值 → 强碰撞风险(触发预警或联动主动安全功能)
当 TTC 较长但 DTC 极小(例如目标车在倒车) → 触发低速静态危险提示
当 TTC 较短但 DTC 较大(可能为横向穿插车辆) → 加权风险等级判定
DTC 触发阈值设定及解释
默认阈值设定:
1. 主车宽度假设为 1.8m;
2. 默认 DTC 阈值设定为 0.9m(即主车左右边缘至中心线距离);
3. 若目标车的预测轨迹进入或接触主车尾部的轮廓边界(DTC ≤ 0.9m),视为存在实际碰撞风险。
自适应/动态调整建议
在不同工况下可动态调整 DTC 阈值,例如:
工况
推荐 DTC 阈值
原因说明
高速直行
0.9 m
保守设定,避免误报
拥堵低速跟车
0.6 ~ 0.8 m
提高灵敏度,适配精细防撞
倒车场景识别
0.4 ~ 0.6 m
可提早感知缓慢倒车风险
DTC 在系统中的使用策略建议
作为主触发条件之一
1. 与 TTC 共同作为报警系统的主要触发条件;
2. 在低速场景下,优先采用 DTC 判断。
用于误报过滤
当 TTC 触发一级预警,但 DTC 大于阈值较多(如 >1.5m),可认为风险较低,过滤报警。
支持多目标最危险目标筛选
系统可根据 DTC 最小值筛选最有可能碰撞的目标,优先上报或预警。
用于风险等级细分
DTC 越小 → 危险等级越高 → 可作为安全系统风险量化评分输入(如RCW评分、碰撞可能性评估等)。
典型工况分析示例
工况类型
当前距离
相对速度
TTC
DTC
判定
高速快速追尾
20m
40 km/h
1.8s
2.5m
触发一级报警
倒车入位,接近主车尾部
2m
3 km/h
2.4s
0.7m
DTC 触发报警
拥堵跟车缓慢前进
1.2m
5 km/h
0.9s
0.85m
TTC+DTC均触发,提升风险等级
横向插入目标(不影响主车行驶)
10m
20 km/h
TTC=1.2s,但DTC>1.5m
无报警
03、系统状态机及典型用例介绍
3.1 状态机迁移图
如图展示了后碰撞预警(RCW)系统在不同状态下的运行逻辑和状态转换关系。

图中有以下几个主要状态和它们之间的转换:
主要状态:
RCW OFF:系统关闭状态,此时RCW系统不工作或不监控车辆后方情况。
RCW Passive:系统被动监控状态,此时系统监控车辆后方情况但不发出警告,通常是在车辆静止时进入此状态。
RCW Error:系统错误状态,表示系统检测到故障或其他异常情况。
RCW Active:系统活跃状态,当检测到后方车辆有潜在碰撞风险时,系统会进入此状态并发出警告。
在活跃状态内部,还分为两个警告级别:
arning Level 1(警告级别1)
Warning Level 2(警告级别2)
RCW(Rear Collision Warning)系统具备多种运行状态,其功能控制受车身供电状态(IG状态)、RCW开关启用状态、传感器运行情况、系统故障检测结果及环境条件等多重因素共同影响。系统通过状态机机制管理运行流程,以确保安全性、可靠性和用户体验。
3.2 RCW状态机工作状态详解
OFF(关闭状态)
定义:当整车处于IG OFF(点火关闭)状态,或RCW功能在HMI或设置菜单中被用户手动关闭时,RCW系统完全停止运行,所有雷达监测、预警算法与报警输出均不工作。
触发条件:
1. 车辆未通电(IG OFF);
2. 用户通过设置将RCW功能关闭(例如设置菜单关闭后方碰撞预警);
系统行为:
1. 所有子模块停止运行;
2. 不进行任何雷达侦测与计算;
3. 不输出报警或状态显示;
4. 功耗处于最低水平;
5. 可通过再次上电或手动开启RCW开关恢复功能。
Passive(待机状态)
定义:系统硬件无故障,RCW开关已开启,且车辆处于IG ON状态,但尚未满足功能激活的外部环境与车辆状态要求时,系统进入待机状态。
典型未满足激活条件的情况可能包括:
1. 车速过低或车辆静止;
2. 后角雷达未准备好(初始化未完成);
3. 雷达视野内无有效目标或目标不满足激活门槛(如相对速度过低);
4. 环境干扰或误检风险较高(如大雨、雷达被遮挡);
系统行为:
1. 后角雷达维持运行,持续采集周围数据;
2. 系统持续评估是否满足激活条件;
3. 无报警输出,保持待机监控;
4. 功耗维持在中等水平,确保快速激活响应。
Active(激活状态)
定义:当车辆满足RCW功能激活条件时,系统从待机状态切换至激活状态,开始执行目标识别、碰撞预测及报警提示等功能。
激活典型条件:
1. IG为ON,RCW开关已打开;
2. 后角雷达正常工作;
3. 检测到后方存在以较高相对速度接近的移动物体(如车辆、摩托车等);
4. 系统无故障,无环境干扰影响检测能力。
系统行为:
1. 开启后方目标持续识别与碰撞预测计算;
2. 对符合威胁等级的目标触发报警;
3. 报警分为两个等级,依据威胁程度区分:
一级报警(预警):检测到有目标快速接近,可能形成碰撞趋势,但尚未达到高度危险阈值。系统通过屏幕提示、轻微蜂鸣等方式提示驾驶员注意后方;
二级报警(强报警):系统判定目标即将与本车发生碰撞,触发强报警,如高强度音效、多媒体屏闪烁等,以确保驾驶员能迅速采取应对措施(如规避、加速变道等)。
Error(故障状态)
定义:在RCW系统处于开启状态时,若检测到功能关键模块(如后角雷达、数据通信、控制单元)存在故障,或诊断过程中触发相关DTC(诊断故障码),系统将进入错误状态,RCW功能不可用。
典型错误原因:
1. 后角雷达故障或数据中断;
2. CAN通信中断或异常;
3. 系统软件故障;
4. 雷达遮挡、线路断开;
5. 其他根据DTC定义的故障情形。
系统行为:
1. RCW功能停用,不再执行碰撞预测与报警逻辑;
2. 驾驶员可在仪表或中控屏看到相关故障提示(如“RCW系统故障,请检查”);
3. 故障信息被记录到车辆诊断系统,供后续维保分析;
4. 恢复功能需故障被清除且重新满足激活条件。
3.3 状态优先级说明
系统采用优先级机制,以确保在多种状态冲突下,功能逻辑统一明确,状态优先级如下:
OFF > Error > Passive = Active 即:
一旦车辆IG OFF 或 RCW开关关闭,则无条件进入OFF状态;
若功能开启但出现故障,优先转入Error状态;
在无故障且RCW开启的前提下,根据是否满足激活条件,在Passive或Active之间切换。
3.4 状态初始化与默认行为
IG 上电后,RCW状态机默认初始化为 OFF状态;
只有在RCW开关处于开启,系统硬件和环境条件均正常后,才可能进入 Passive 或 Active;
在RCW关闭状态下(OFF),即便满足所有其他条件,系统也不会运行。
3.5 状态转换说明
图中箭头表示状态转换的方向,每个箭头旁边标注了触发该转换的事件(T1-T12)。以下是这些事件的可能解释:
从RCW OFF状态出发
T1:触发事件,可能是驾驶员启动车辆或手动开启RCW系统,使系统从关闭状态进入被动监控状态。
T9:触发事件,可能是系统检测到某种错误或故障,使系统从关闭状态直接进入错误状态。
T7:触发事件,可能是驾驶员手动关闭RCW系统,但可能需要进一步确认逻辑。
从RCW Passive状态出发
t2:触发事件,可能是系统检测到潜在碰撞风险,需要提升警告级别,因此进入活跃状态(Warning Level 1)。
T11:触发事件,可能是系统检测到错误或故障,进入错误状态。
T10:触发事件,可能是驾驶员手动关闭RCW系统,返回到关闭状态。
T3:触发事件,可能是驾驶员手动将系统切换到活跃状态,虽然这在实际中不太常见。
从RCW Error状态出发
T8:触发事件,可能是错误被修复或系统重置后恢复正常,进入被动监控状态。
T12:触发事件,可能是驾驶员手动关闭系统,从错误状态进入关闭状态。
在RCW Active状态下
T5:触发事件,可能是警告级别提升的条件,如后方车辆距离进一步缩小,导致警告级别从1提升到2。
T6:触发事件,可能是警告级别降低的条件,如后方车辆距离增加,警告级别从2降低到1。
T4:触发事件,可能是驾驶员手动将系统切换到被动监控状态,或者系统自动判断风险已解除。
这张图通过状态机的形式描述了后碰撞预警系统在不同情况下的行为。系统在正常情况下会在被动监控和活跃状态之间切换,根据后方车辆的接近程度调整警告级别。如果检测到错误,会进入错误状态,需要驾驶员或技术人员进行干预。
3.6 典型用例
RCW典型使用场景示例如下:
高速公路减速时:当前车减速或准备并线时,后方车辆高速逼近,RCW及时提醒。
城市拥堵路况:主车缓慢行驶,后车电动车/摩托车快速穿插接近。
临时停车等待:在红绿灯或临时停车状态下,后方车辆未及时减速。
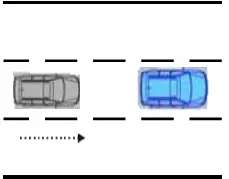
自车静止后方来车
该场景常见于如下交通情境:
-
红绿灯停车:自车在路口静止等待信号;
-
交通拥堵停车:自车被动停车等待前车启动;
-
临时停车或紧急制动:如避让行人、接打电话等;
-
侧方/路边停车:等待乘客上下车或进入泊车状态。
此时,自车完全静止,但后方有目标车辆以一定速度驶来,存在发生追尾碰撞的风险。
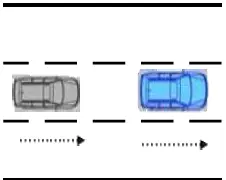
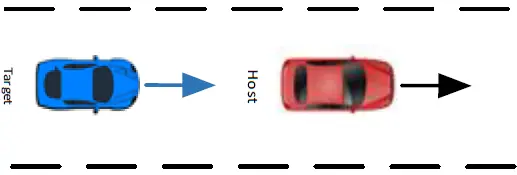
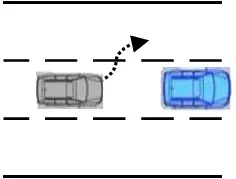
自车行驶后方来车场景
该场景指自车处于行驶状态(低速或匀速行驶),但有后方目标车辆以更高相对速度快速接近,存在发生追尾碰撞的风险。
常见交通情境包括:
-
低速跟车或缓行时,后方车辆突然提速靠近;
-
自车并入主路或车道变换过程中,后车未减速及时跟进;
-
驾驶员注意力不足时,后方快速驶来的车辆处于盲区;
-
夜间或恶劣天气下,自车后方来车识别困难,风险增加。
自车静止后方来车左切出场景
此场景指的是:
-
自车处于完全静止状态(如等红灯、排队、路边临时停车);
-
有一辆或多辆目标车辆从自车后方快速接近,原本处于碰撞路径上;
-
但在接近过程中,目标车辆通过变道/绕行从自车左侧(或右侧)切出避让,未最终进入预测碰撞点。
自车静止后方来车右切出场景
该场景指的是:
-
自车处于完全静止状态(如路口等待、路边临时停车、交通堵塞等);
-
后方有车辆高速接近,一开始存在潜在碰撞风险;
-
但在接近过程中,目标车主动采取变道/绕行,从自车右侧切出避让,未真正进入与自车重叠的碰撞路径。
此场景是RCW系统中的典型“潜在误报场景”,特别是在目标车辆贴近自车右后方变道时更容易误判。

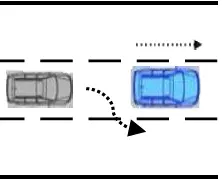
自车行驶后方来车左切出场景
该场景指:
-
自车以中低速或匀速行驶;
-
后方来车以相对更高的速度接近,从自车后方快速接近,初期存在潜在碰撞风险;
-
接近过程中,目标车辆采取向左变道切出的动作,主动避让,未真正进入与自车重叠轨迹;
-
目标最终沿左侧车道行驶并超越自车。
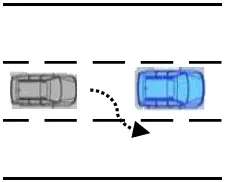
自车行驶后方来车右切出场景
该场景描述如下:
-
自车正在以正常速度在当前车道上匀速或缓慢行驶;
-
后方来车以相对更高速度快速接近,在一段时间内可能构成碰撞威胁;
-
在逼近过程中,目标车辆向右侧变道切出,驶入右侧车道,主动避让自车;
-
最终目标车未与自车发生实际轨迹重合或碰撞,但早期具有潜在威胁性。
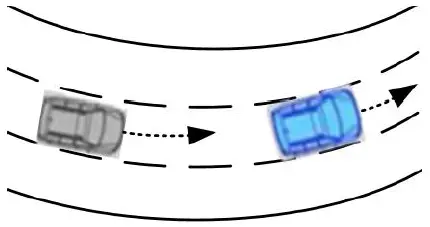
自车弯道(弯道曲率250m)行驶后方来车场景
该场景描述如下:
-
自车处于弯道内,弯道曲率半径为250米,属于中等偏小曲率的弯道,车辆轨迹为半径250m的圆弧;
-
自车沿弯道轨迹匀速或加减速行驶;
-
后方车辆在相对较直的路径或同样弯曲轨迹上高速接近,存在碰撞风险;
-
弯道带来车辆相对位置、速度和角度变化复杂,增加后向碰撞风险判断的难度。
自车弯道(弯道曲率250m)行驶后方来车场景
-
自车行驶状态:自车沿半径为250米的圆形弯道平稳行驶,车速正常(例如30~60km/h);
-
后方车辆动态:后方车辆可能以较高速度(如60~80km/h)沿同一路径或相邻车道接近;
-
路况复杂性:弯道使得车辆的行驶方向持续变化,车辆相对运动变得非线性;
-
安全风险:后方车辆因速度较快且视线受弯道限制,存在追尾或擦碰的风险。
总 结
后方碰撞预警系统(RCW)是一项重要的主动安全辅助功能,主要通过后角雷达对后方动态目标进行探测,并在识别出潜在威胁时向驾驶员发出直观、有效的警报。其工作依赖于精确的传感器、合理的算法判断以及良好的人机交互设计,在当前城市交通拥堵、电动车密集的场景中具有显著的安全价值。随着AI和传感器融合技术的发展,RCW有望向更高智能化、更强预警能力方向演进。
参 考:
1. Drive Confidently with AI: Understanding Rear Collision Warning System
2. Volvo Rear Collision Warning | Autonation Volvo Cars San Jose
3. Chery International | The TIGGO 4's RCW system monitors rear traffic in real-time. If a vehicle approaches rapidly, it instantly activates hazard warning lights... | Instagram
4. How Rear Collision Warning Systems Keep Houston Drivers Safe - ADAS Calibration near Porter TX
来源:汽车电子与软件
作者:北湾南巷













