ADAS整车在环测试解决方案是一种应用在ADAS产品开发及生产过程中系统设备。系统基于视觉传感器目标模拟及毫米波雷达目标模拟设备,构建系统级仿真测试环境,辅助被测车辆实现整车级ADAS工况模拟及测试。
系统特点
系统将智能驾驶测试由传统的外场跑车试验转入内场试验室测试,提高试验效率,降低试验成本,并对指标进行准确量化,可直观的验证ADAS的性能。
• 定制化整车在环测试系统
• 自定义场景库及数据资源
• 配备全套自研核心测试仪表
系统组成
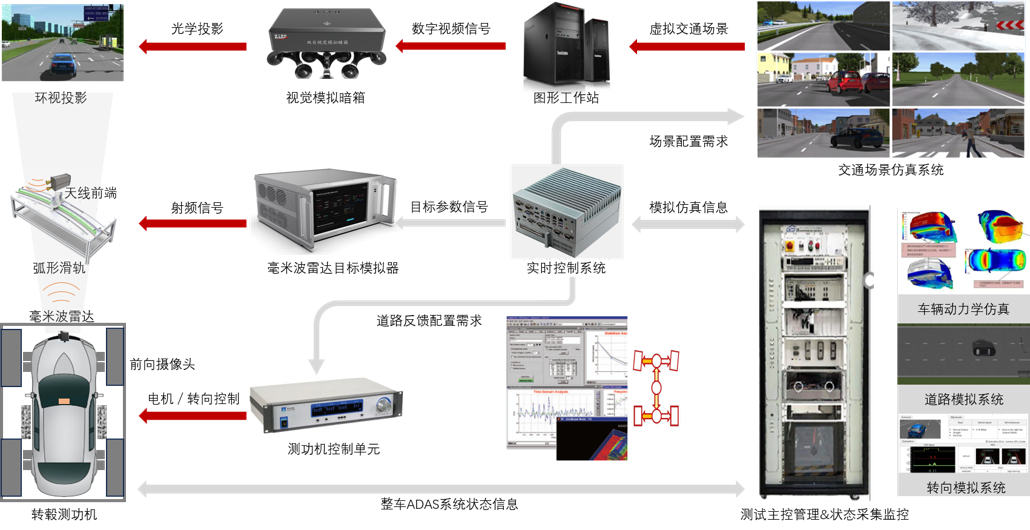
系统由三部分构成,分别为传感器模拟子系统、场景模拟实时控制子系统、测试系统主控子系统。
• 环境感知传感器主要包括视觉传感器和雷达传感器,系统具备对上述类型传感器的仿真,并且可以复现在实际道路中进行测试和感知时的误差,还保证了数据输出的实时性。视觉传感器模拟设备通过对探测范围内的目标特征点的再现以及大小变化,进行环境目标速度、距离以及相对位置的模拟;车载毫米波雷达模拟器设备通过对回波信号在延时时间、频率和功率上的调节来模拟目标相对ADAS产品的距离、速度以及回波功率大小的变化。
• 场景模拟实时控制子系统,通过自动驾驶场景仿真软件构建虚拟的多目标动态交通场景,根据场景的设置情况进行场景的动态仿真,形成与被测ADAS产品搭载车辆相关的交通态势,并经过判断选取、解算提取等形成相对被测ADAS产品搭载车辆的多目标仿真参数信息。
• 测试系统主控子系统设备主要用于对系统中各组件进行综合管控及状态检测,同时可以支持模拟场景的查询、增加、删除等多种维护方式;同时设备具备复杂交通场景生成及交通视景展示,支持通过其他仿真软件导入场景。系统可以实现对虚拟场景目标的捕获、编号、分类、距离、角度等必要信息的识别,可以提供当前模拟场景所需仿真的虚拟传感器输出数据。根据对数据列表的提取,并对传感器进行实时控制,实现所仿真的虚拟场景环境。在整车ADAS系统中所使用的摄像头、毫米波雷达等传感器,都可以基于系统进行传感器仿真测试。
系统测试原理
系统具备ADAS测试场景的仿真及场景构建功能,可以基于ADAS法规对场景进行自定义构建,构建完整的场景可以通过目标角度模拟系统和投影显示系统进行目标模拟,系统中的被测ADAS系统可以基于系统构建的虚拟场景目标,使系统传感器获取环境场景中的目标数据,目标数据经过ADAS系统处理后,ADAS系统进行决策,从而实现ADAS功能测试。
系统功能
• 测试范围:自动驾驶系统、高级辅助驾驶系统;
• 测试功能
a)智驾功能测试:FCW、AEB、ACC、LDW、LCA、LCK、LKA、BSD、BCW、TSR、APA等功能测试;

b)智驾性能测试:传感器融合性能测试、TTC时间测试、CIPV识别跟踪测试、抗环境干扰能力测试、长期信赖性测试、不良问题再现及对策效果测试;
• 测件特点
a)支持多种类传感器模拟仿真,视觉、毫米波雷达、激光雷达、V2X、GNSS等;
b)支持多种第三方模拟仿真软件,51 Sim-One、PreScan、VTD等;
c)支持自动化无人测试,自动完成全部测试项并判定结果。
EMC环境ADAS整车在环测试系统
我司还提供EMC环境下ADAS整车在环测试系统,该系统是一种应用在EMC电磁暗室环境下的ADAS产品开发及测试过程中系统设备。系统设备基于视觉传感器目标模拟及毫米波雷达目标模拟设备,构建系统级仿真测试环境,辅助被测车辆实现整车级ADAS工况模拟及测试。
配合EMC实验室环境中的转毂,可以实现EMC环境下虚拟场景中前向碰撞预警(FCW)、自动紧急制动(AEB)、自适应巡航控制(ACC)、盲区监测(BSD)、交通标识识别(TSR)、车道偏离预警(LDW)等功能场景。












