- 无人驾驶车辆虚拟测试技术的发展
2019-10-07
智能网联汽车传感器性能全面测评与未来展望
2023-11-273399
自主路径跟踪:无人驾驶汽车安全稳定行驶的关键
2023-07-193388
汽车自动驾驶测试抽象场景:构建安全与全面性的评估平台
2023-11-173380
ADAS-LDW车道检测与跟踪方法_算法实例代码
车道检测的目标:1. 车道形状,包括宽度、曲率等几何参数2. 车辆在车道中的位置,包括横向偏移量,车辆与道路的夹角(偏航角)车道检测与跟踪一般分为以下几个部
2019-08-213378

- 自动驾驶汽车感知测试——传感器市场分析
2018-10-24
智能网联汽车产品测试策略:确保安全可靠的驾驶体验
2023-11-273342
RHONN模型:实时建模和控制非线性车辆行为的潜力
2023-07-193311
- 基于 Prescan 的智能驾驶辅助系统在环研究
2019-05-31

- ADAS 实验室将用于性能测试和验证
2020-08-21
自动泊车之停车位检测算法(角点检测/语义分割)
一、背景介绍自动泊车大体可分为4个等级:第1级,APA 自动泊车:驾驶员在车内,随时准备制动,分为雷达感知和雷达+视觉感知两种方式。第2级,RPA 远程泊车:驾驶员在车外,通过手机APP的方式控制泊车。第3级,HPA 记忆泊车:泊车之前先通过 SLAM对场景建模,
2022-12-083253
智能网联汽车视觉感知系统全面测评:硬件设备、算法性能、数据处理的关键分析
2023-11-273252
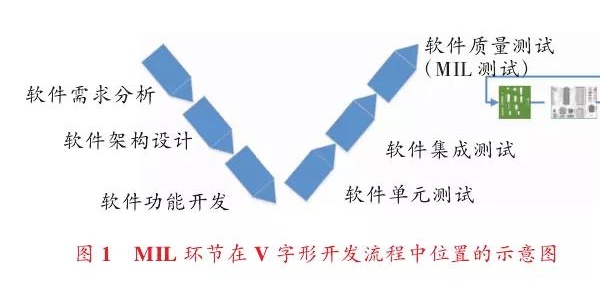
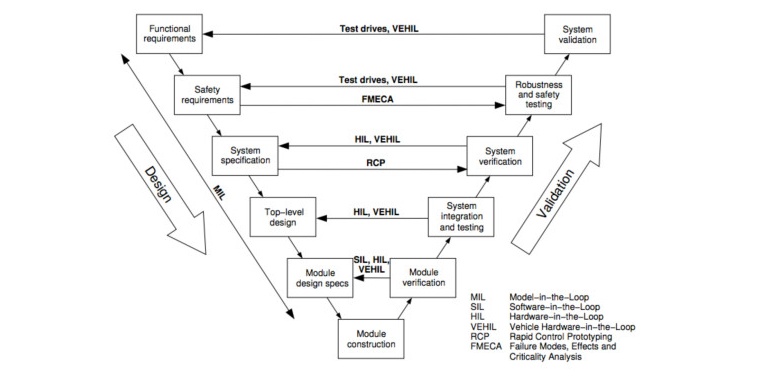
- 自动驾驶运动控制算法的模型在环测试
2020-03-24

- 基于深度强化学习的连续性动作控制
2018-10-08

- Multimatic虚拟车辆开发中心
2020-02-22

- 无人驾驶的拦路虎——惯性导航系统
2018-04-20

- 论ADAS数据录制和回放的重要性?法国法雷奥现身说法
2020-06-22
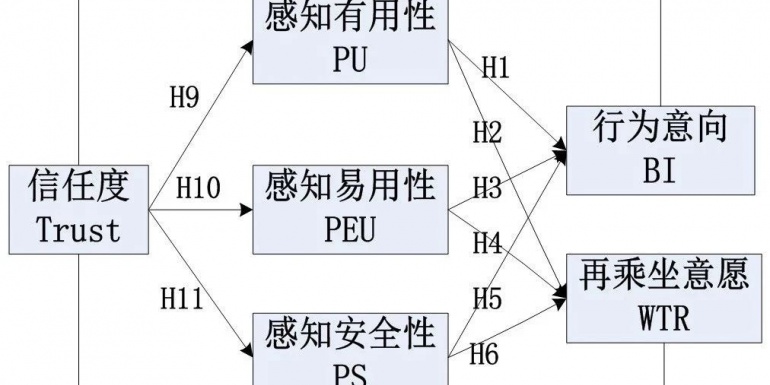
- 基于现场试验的自动驾驶汽车接受度研究
2019-06-04

- 基于场景的自动驾驶汽车虚拟测试研究进展
2019-12-24
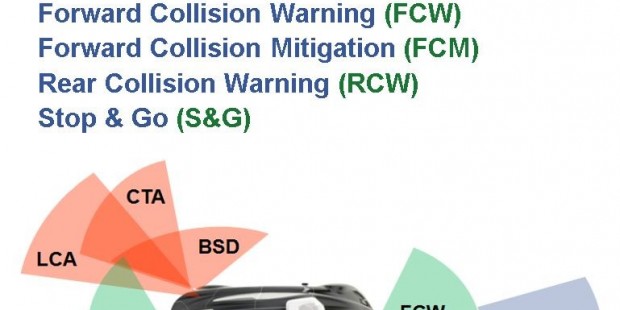
- 简单分析高级辅助驾驶ADAS技术以及产品
2018-03-13

