新能源汽车高压系统:技术原理、关键技术与未来发展趋势
2023-11-212849
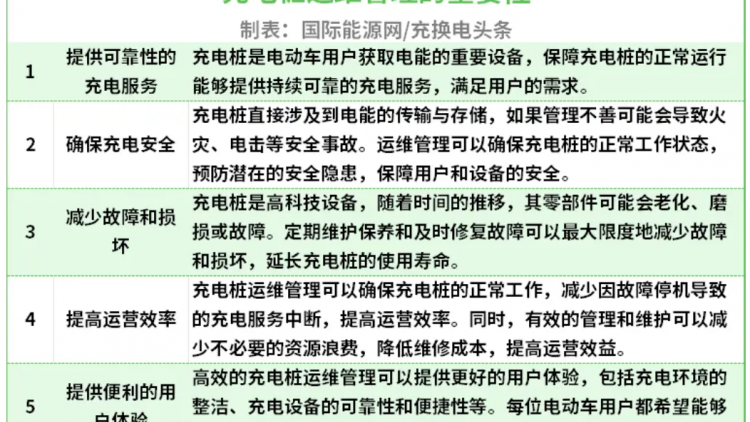
- 充电站运营 | 充电桩运维以及故障诊断方法
2024-07-06

- 全球定位系统GPS在汽车中的应用
2019-06-26

- 「日间行车灯」功能设计法规要点
2024-07-09
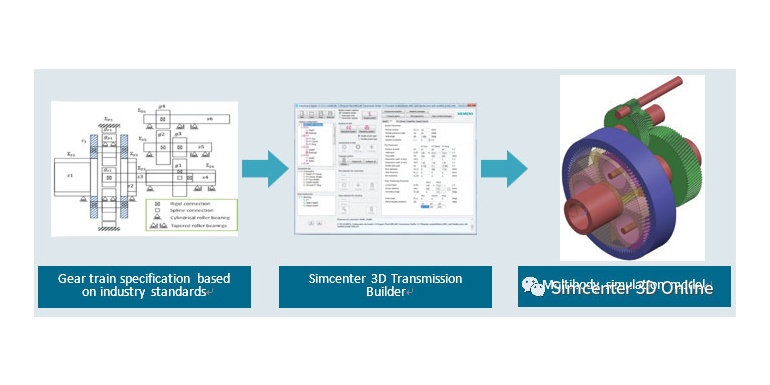
- 齿轮传动系统动力学性能仿真和应用
2019-04-19
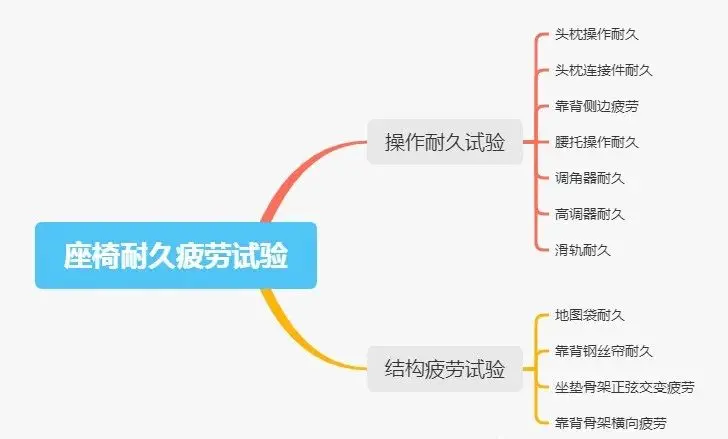
- 汽车座椅11大部件耐久性试验汇总
2024-08-10

- RSI利用算法及气象数据评估路面危险系数 已在挪威开展路测
2018-02-27
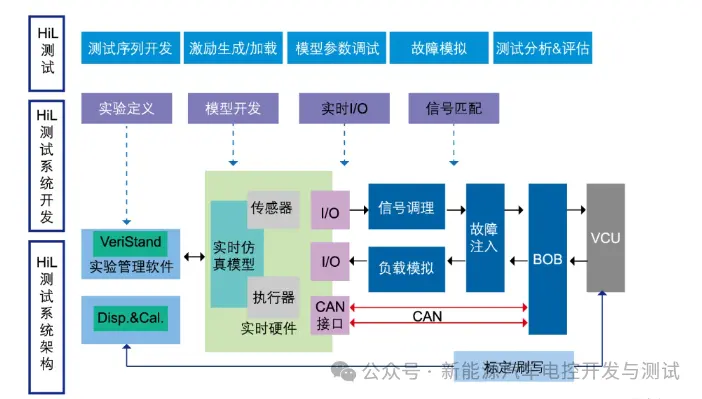
- 【干货分享】硬件在环仿真(HiL)测试
2024-09-13

- 产品速递 | 从首创到新一代eDAQ-坚固耐用,适合移动测试
2020-03-19

- “数字化双胞胎”之产品风险数字双胞胎(一)-基于MADe的产品RAMS设计
2021-03-10
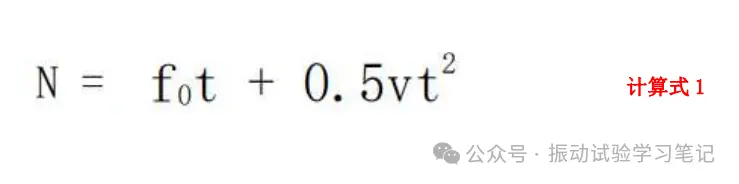
- 振动试验入门 其他相关事项13 通过正弦扫频振动次数如何计算振动试验时间
2024-08-05
- 汽车双质量飞轮动态试验方法研究
2022-06-08

- 汽车底盘异响该怎么分析
2021-03-09
超越测试——评估自动驾驶系统转向控制性能的重要指标
随着自动驾驶技术的快速发展,自动驾驶车辆已经开始在公共道路上进行测试和部署。自动驾驶系统需要具备超越能力,即当车辆遇到无法应对的情况时,驾驶员应能够通过对车辆转向控制的干预,使车辆安全超越障碍物。因此,超越测试是评估自动驾驶系统转向控制性能
2023-04-252840

- 小鹏G3完成两轮三高测试:一辆车该走的路,一步也不少!
2018-09-18

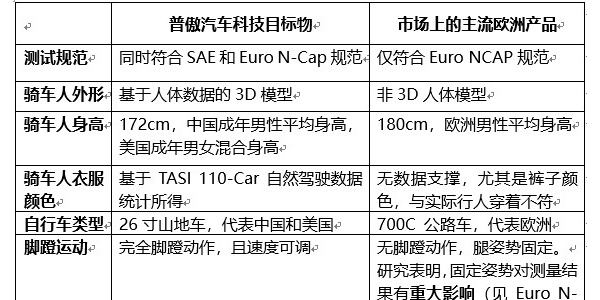
- 标准化自行车AEB测试系统
2020-05-20
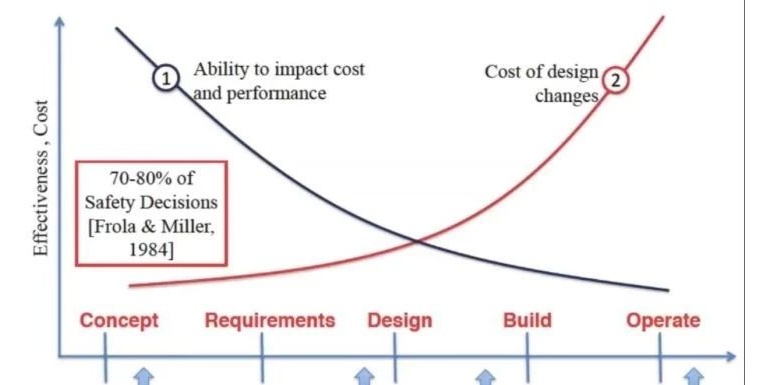
- 自动驾驶路线图:基于STPA的系统分析
2019-06-09
- 一款48VBSG电机控制器开发与验证
2021-03-02
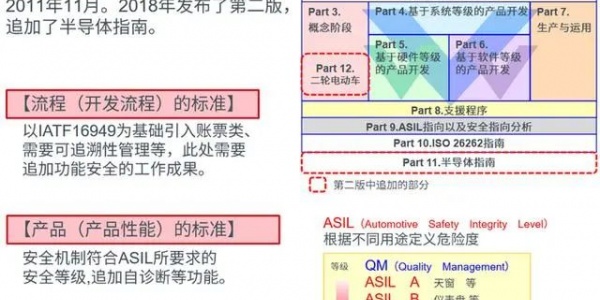
- 为啥要过"ISO26262"认证?揭秘汽车安全标准背后的生存法则
2020-08-04

