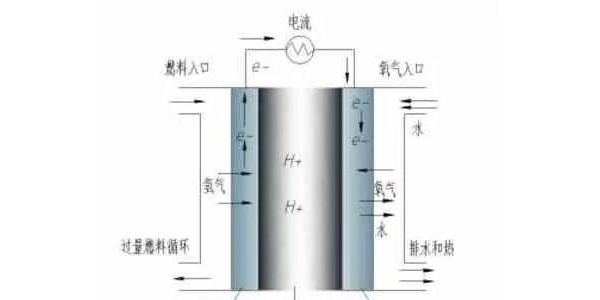
质子交换膜燃料电池膜电极耐久性相关标准简析
燃料电池耐久性的提升对燃料电池汽车大规模的商业化有重要意义。目前,国际上已有多个组织或机构制定了燃料电池膜电极耐久性测试规程或标准,具体如下:(1)美
2022-07-062619
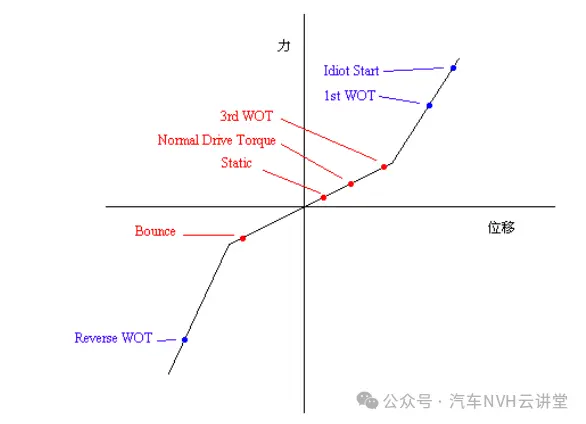
- 悬置系统常用工况全解析
2024-08-14

- 全球唯一一家摄像头、雷达、激光雷达都涉足的传感器制造商,它是如何定义自动驾驶的?
2018-09-27

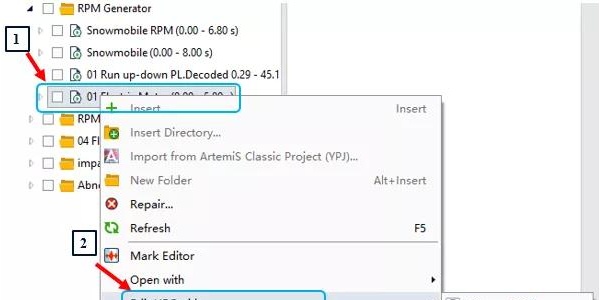
- ArtemiS SUITE之Rpm Generator离线转速提取
2019-11-29
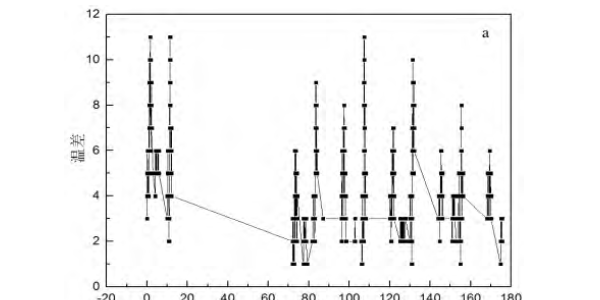
- 单体不一致性对新能源客车电池寿命的影响
2021-07-05
- “安全+智慧”并进,东风汽车研发总院参与国家充放电标准制定
2025-04-30
- 突破自动驾驶测试瓶颈 | 腾讯模拟仿真平台详解
2020-03-28

- 汽车风阻系数越来越低,能让车更快更省油吗?
2020-08-23
- 电动汽车充电领域国内外标准现状
2021-05-24
氢能在交通领域的应用及燃料电池汽车成本分析
摘 要该文论述了当前氢能在交通领域的发展现状及主要应用场景,详细分析了氢燃料电池车辆的购车成本及运营成本,全面比较了氢燃料电池车与燃油车、纯电动车的全生命周期成本,最后对氢能交通各方面成本进行预测。在国家燃料电池汽车示范运营政策推动下,氢燃
2023-01-252615

- 直播丨蔡司中国工业质量:三维测试技术在汽车相关实验中的应用
2026-01-21
- 东风日产利用LMS车辆动力学解决方案,让本土汽车工程技术更进一步
2018-08-27

- 技术专题:车用毫米波雷达技术趋势及发展现状
2018-12-17

- 泽尔、ABD、Dewetron联袂ATE舞台,展示全流程汽车安全测试方案
2025-08-31

- NI推出新编程工具LabVIEW NXG应对5G、AI和无人驾驶汽车测试新挑战
2018-02-27
- 车用燃料电池动力系统综述
2019-09-14
- 【直播预告】VMS3400踏板线控测试系统详解
2025-07-09
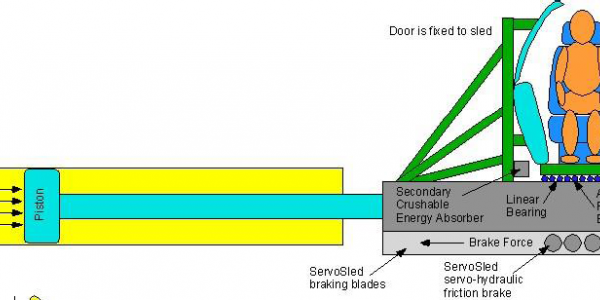
- 侧面碰撞台车系统简介
2020-07-14
舍弗勒于上海安亭研发中心扩建总部之外最大的研发基地
2019年4月17日,2019上海国际车展期间,舍弗勒与上海国际汽车城达成合作,舍弗勒大中华区首席执行官张艺林博士与上海国际汽车城(集团)有限公司总经理陈钢先生
2019-04-192610

