
- 安立和dSPACE将推进5G汽车应用的仿真和测试--在MWC 2020联合展示
2020-01-15
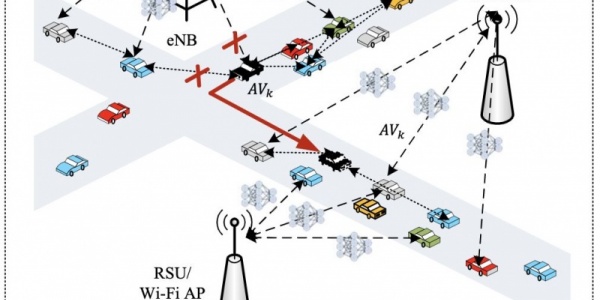
- 自治车辆的隐私保护、可验证和容错的边缘学习
2020-02-24
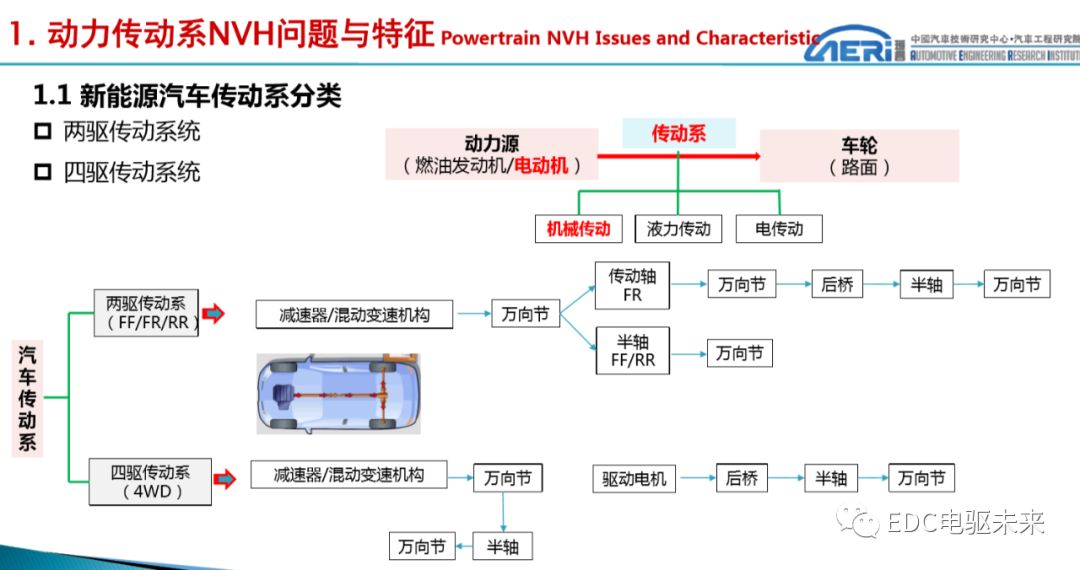
- 新能源动力传动系统NVH性能开发
2021-03-10

- 京德智慧高速创新研用安全风险预警系统
2021-09-26
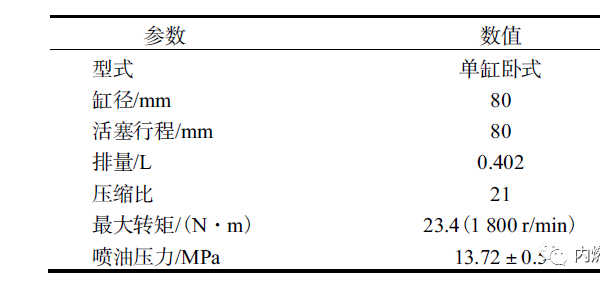
- 基于TEM、FT-IR 和XPS的PODE2-4/柴油混合燃料颗粒物特性
2022-02-28
在Carla模拟器利用英伟达SFF的自动驾驶策略
论文 “Rationale-aware Autonomous Driving Policy utilizing Safety Force Field implementedon CARLA Simulator“,来自韩国延世大学。安全模型,英伟达的安全力场(SFF)和Mobileye的责任敏感安全(RSS)等对决策来说是有可解释性的数学模型。这项工作从
2022-11-29737
地平线余凯观:十年以后连L3都不会真正实现
自动驾驶技术的发展一直是汽车行业和科技领域的热门话题之一。然而,地平线创始人CEO余凯在2023年中国电动汽车百人会论坛上表示,现在到2025年,应该把高速的NOA、环线的NOA这种封闭道路的自动驾驶做到如丝般顺滑,但是价格不能太贵,同时要把城区NOA做到可用
2023-04-06737
自动驾驶机器人:高精度、高动态多目标协同自适应控制与驾驶安全性
2023-05-18737
满足AEC-Q100标准:打造符合汽车行业质量要求的车规芯片
2023-07-16737

- NESTA功能安全行业解读——整车电驱转矩功能安全验证
2024-07-12
- 褚教授专栏 | 波束形成声源识别技术
2024-07-24
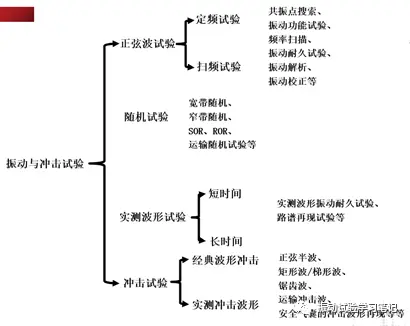
- 振动试验基础4 试验条件内容介绍之正弦试验
2024-08-02

- 直播|中汽中心 工程院:汽车智驾技术主题云论坛
2024-11-24
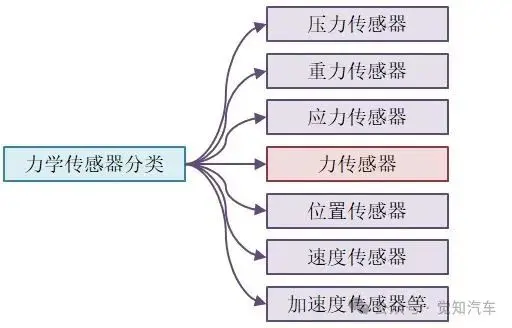
- 不同力传感器介绍
2025-01-03
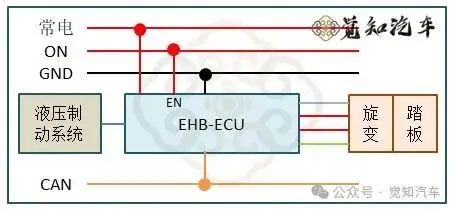
- 新能源汽车如何防止制动踏板失效
2025-01-07

- 宁德时代决定在德国生产电池
2018-06-07

- 如何通过研究老年假人模型提高汽车安全性?
2018-07-13

- 麦格思维特MPI&GDI喷油器疲劳试验台
2018-12-01
- 泛亚技术中心:用数字化技术打磨更好的产品
2018-12-25

