一、概述
在新能源汽车的应用中,线控制动系统(Brake-by-Wire, BBW)通过取消传统的机械制动踏板与制动器之间的物理连接,取而代之的是通过传感器和电子控制单元来传递制动信号,从而形成一种基于电子信号而非传统的机械连接来控制车辆制动的系统。
二、基本功能原理与组成
在车载线控制动系统中,其表现形式主要有两种类型:电子机械制动(Electro-Mechanical Brake, EMB)和电子液压制动(Electro-HydraulicBrake, EHB)。其中EHB系统保留了一部分液压元件,也是当下主流的线控制动系统,而EMB系统则采用全电子和机械的制动方式,将是下一代线控制动系统的主要应用。
2.1.EHB基本工作原理
在EHB系统的制动踏板模块中,集成有用于检测踏板位移与角度的旋转变压器(一种电磁式传感器),该旋变器有一个固定不动初级绕组与电源相连,次级绕组安装在旋转轴上,会随着制动踏板动作一起旋转。当初级绕组通电时,会在次级绕组中产生电磁感应现象,在驾驶员踩下制动踏板时,安装于旋转轴上的次级绕组可通过检测旋转角度的变化输出与之成一定比例关系的电信号,从而系统可计算出制动踏板的位移量,并通过测量在制动踏板被踩下时旋转角度相对于初始角度的变化量,从而计算出驾驶员踩踏制动踏板的力度。通过由旋变器将机械旋转角度转换而来的电信号,控制单元可计算出驾驶员的实时制动意图,并据此调整制动压力。其系统架构示意如下:
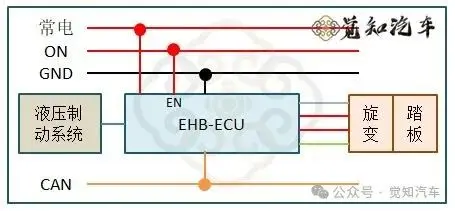
图1 EHB系统示意
2.2.EMB基本工作原理
与EHB相比,EMB完全电子化,首先在踏板信号的检测上其通常不再需要使用旋变器来监测位置和角度变化,而是通过位移传感器与力传感器的应用,直接对驾驶踩踏制动踏板的动作进行采集,同时在制动系统部分取消了传统的液压制动系统,取而代之的是通过电机直接驱动制动卡钳的夹紧和释放的制动方式。
其基本工作原理是:当驾驶员踩下制动踏板时,踏板开始发生位置变化,此时安装在制动踏板附近的位移传感器与力传感器可检测到踏板的位移量、受到踩踏力度的大小,并将该信号转换为电信号传输给控制单元,控制单元在接收到信号后,根据信号的强度和持续时间来判断驾驶员的制动意图,再通过控制制动电机与其他制动执行机构来调整制动压力,从而实现对车辆的制动。此时其系统架构示意如下:
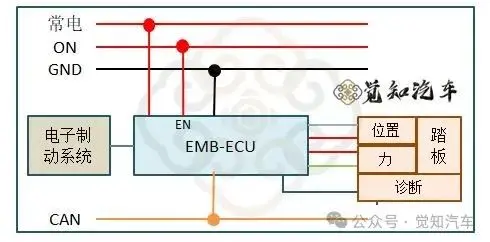
图2 EMB系统示意
三、踏板信号失效策略
3.1.失效模式示例
由于线控制动系统的应用,让车辆的制动信号请求完全依赖于制动踏板模块,同时对制动力的执行也完全依赖于电子制动系统。因此在制动信号的传输过程中便存在至少两处可能的信号丢失场景。
1)踏板模块与ECU之间
在系统上电时,首先将进行自检,以识别是否存在潜在故障,若系统无异常,则可正常运行车辆,此过程可较好的识别出系统可能存在的故障。但若在车辆运行过程中出现踏板模块与ECU之间的线束出现断路等异常时,此时对于踏板模块而言,其可正常输出相关信号,于ECU而言,其可也正常接受相关信号,但由于两节点之间的线束断开,那么系统如何判断此过程是正常状态的制动信号没有触发,还是因为断路导致的无法收到信号?
解决方案示意:在不使用冗余设计(即无多套相同系统)的情况下,系统必须要能够区分是真正的无信号输入还是因为断路导致的信号丢失,通常会有如下策略:
a)回路检测
通过硬件电路设计在信号线连接电路中加入一个回路检测电路,当信号线完整时,该电路可形成一个闭环,一旦信号线断开,闭环将被破坏,此时系统可立即检测到这种异常状态。其实现过程是系统周期性地监测回路检测电路中的电流或电压,以此来判断电路是否完整,若电路完整,则表示信号线正常,若检测信号出现异常,则表示信号线存在问题,此时系统将触发报警,并采取相应的安全措施。
b)信号反馈检测
需在EMB系统中的制动踏板模块中集成反馈电路、信号处理模块等,当踏板模块在发送信号的同时,反馈模块会开始等待控制单元的确认信号。如果在一定周期中未能接收到确认信号,则可判断为信号线存在问题。其实现过程是:踏板模块按照预定的协议发送信号,同时该信号中包含特定的标识符作为信号确认的基础,当控制单元接收到踏板信号后,会根据接收到的信号回传一个确认信号给踏板模块,若在发送信号后的一定周期中没有接收到确认反馈信号或收到的反馈信号不正确,则可认为信号线存在问题,此时系统将触发报警,并采取相应的安全措施。此方式需在踏板模块中集成部分硬件及软件策略,以让其具有基本的智能判断能力,这可能增加其成本。
c)信号一致性检测
在制动系统的工作中,当制动踏板被踩下时,踏板位移、踩踏力度这两种信号必然是同时存在的,因此当系统在接收信号时,如果仅接收到其中一种信号,那这通常表明另一路信号出现了异常,此时系统将触发报警,并采取相应的安全措施。但该策略在应对多路传感器信号同时失效时,将无法识别。
如上所述的部分策略中各有应用优势与局限性,在实际车载应用中,会通过结合多种策略以确保线控制动系统的有效性。
2)ECU与电子制动系统之间
此两部分节点之间因线路故障导致的失效检测相对于上述情景要相对好识别。首先,当踏板与ECU之间建立制动需求后,ECU将通过制动力计算并以电信号的方式控制电子制动系统执行所需的制动目标。此过程中,若电子制动系统的执行动作不正确,如不执行、部分执行、执行力度不正确等,那么将判断此节点之间信号传输存在异常,此时系统将发出警报,并执行相关安全策略。
此过程中需要关注的是,由于制动ECU与电子制动系统(通过制动电机控制卡钳)之间的信号传输线路出现了故障,当部分线路(4路中的个别)异常时,车辆还具有部分制动能力,此时可通过回收制动配合剩余部分制动力来让车辆停下。
但若4路制动全部失效,此时的车辆将失去直接的制动控制能力,基于此失效模式,车辆将无法通过主动制动的摩擦力让速度下降为0,所以在策略上将唯有通过回收制动方式让车辆主动减速。但新出台的法规对再生制动做出了明确要求,即不能通过再生制动让车速降低为0,因此当EMB被规模化应用时,该条标准将可能被更新。
四、总结
新能源汽车行业随着相关技术的发展,其控制模式、应用方式也在随着发生变化,作为车辆主动安全中的关键技术,线控制动系统一方面是无人驾驶车辆应用所无法绕开的技术路线,另一方面也是决定用户是否对该形态车辆具有应用信心的关键。因此在其应用中,全面的评估失效策略至关重要,如上所述,这其中还可能涉及对法规的重新认识。
来源:觉知汽车













