BITS: 交通仿真的双层模仿学习方法
arXiv论文“BITS: Bi-level Imitation for Traffic Simulation“,2022年8月26日,Nvidia的工作。仿真是自动驾驶车辆等机器人系统扩大验证和检验(VV)的关键。
2022-09-01657

- imc FAMOS 如何精准解析测量信号及参数?了解FFT函数的强大功能
2024-10-13

- 上汽智能卡车新征程:首站落地洋山港,将持续拓展更多场景
2019-08-30
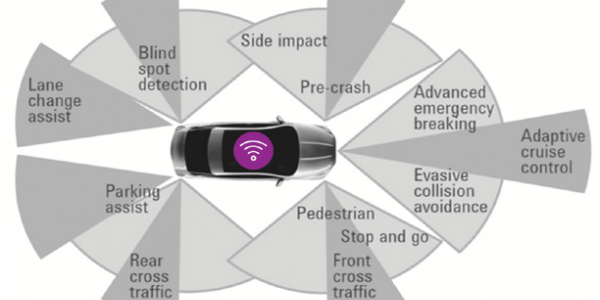
- 雷达 未来将持续在 ADAS 和 自动驾驶汽车中 扮演重要角色
2020-06-12

- 东风日产 | 大功率充电规模化关键要素分析
2021-11-15

- 奇瑞飞行汽车首创模块化设计:省略繁琐起飞流程
2024-10-19
从欧盟NCAP到芯片拆解,看4D雷达进展
导读针对汽车的各种安全法规层出不穷,主机厂正在寻求一个平台或一种技术,以便跟上诸如GTR(全球统一汽车技术法规)、欧盟NCAP(新车安全评估项目)等安全法规
2020-12-25655
800V高压系统:推动新能源整车充电技术升级的关键
2023-05-24655


- 惯性传感在自动驾驶中的作用
2019-03-20

- 开拓视线保障驾驶安全,博世革新95年不变的车载遮阳板
2020-01-06

- 浅析汽车安全气囊
2021-03-22
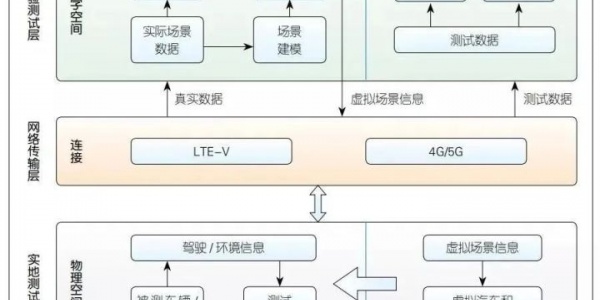
- 浅析基于数字孪生的网联自动驾驶测试方法研究
2022-01-09
一文梳理无人驾驶汽车系统基本框架
无人驾驶系统的核心可以概述为三个部分:感知(Perception),规划(Planning)和控制(Control),这些部分的交互以及其与车辆硬件、其他车辆的交互可以用下图表示:感知是指无人驾驶系统从环境中收集信息并从中提取相关知识的能力。其中,环境感知(Environ
2022-12-09654
汽车底盘性能开发与优化
2023-12-04654

- 为什么我们认为整车800V技术会提前应用?
2021-12-26

- 博世和戴姆勒:无人驾驶停车许可
2019-08-17

- 用于2030年的车用动力系统的研究与开发
2020-04-15

- 协同推进大功率高压快充,满足电动汽车用户快速补能需求
2021-12-22
- 关于自动驾驶车安全保证、验证和认证的综述
2022-02-21

