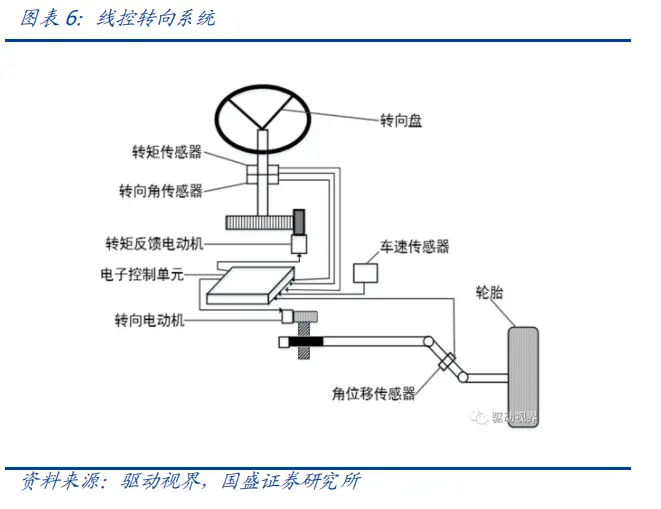
底盘域将集成整车制动、转向、悬架等车辆横向、纵向、垂向相关的控制功能,实现一体化控制。传动系统负责把发动机的动力传给驱动轮,可以分为机械式、液力式和电力等;行驶系统把汽车各个部分连成一个整体并对全车起支承作用;转向系统保证汽车能按驾驶员的意愿进行直线或转向行驶;制动系统迫使路面在汽车车轮上施加一定的与汽车行驶方向相反的外力,对汽车进行一定程度的强制制动,其功能是减速停车、驻车制动。底盘域可在传动系统、行驶系统以及制动系统中集成多种功能,较为常见的有空气弹簧的控制、悬架阻尼器的控制、后轮转向功能、电子稳定杆功能、转向柱位置控制功能等。若提前预留足够的算力,底盘域将集成整车制动、转向、悬架等车辆横向、纵向、垂向相关的控制功能,实现一体化控制。实现底盘域的功能,需要实现底盘域驱动、制动和转向算法的集成。
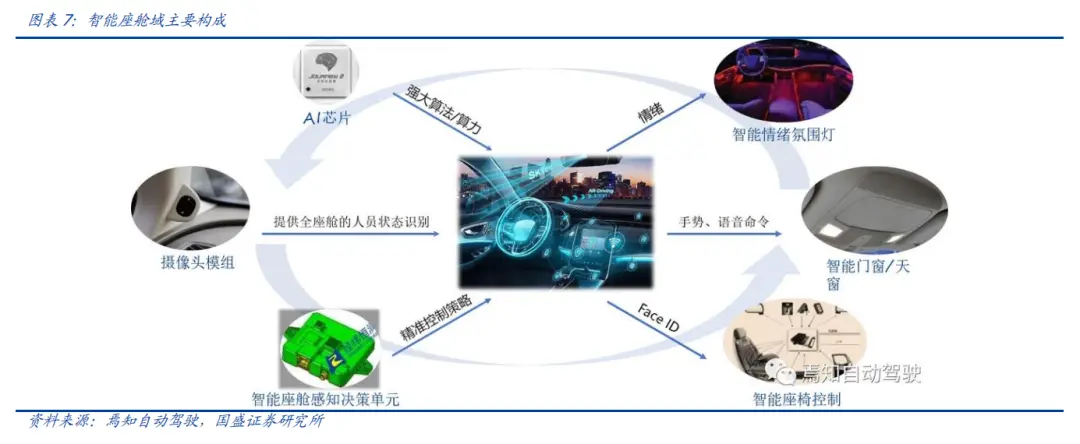
智能座舱域将 HUD(抬头显示)、仪表、车载信息娱乐等座舱电子集成,实现“一芯多屏”。智能座舱的构成部件主要包括全液晶仪表、大屏中控系统、车载信息娱乐系统、抬头显示系统、流媒体后视镜等,座舱域控制器通过以太网/MOST/CAN,实现抬头显示、仪表盘、导航等部件的融合,不仅具有传统座舱电子部件,还进一步整合智能驾驶ADAS 系统和车联网 V2X 系统,从而进一步优化智能驾驶、车载互联、信息娱乐等功能。智能座舱域可以实现“独立感知”和“交互方式升级”。一方面,车辆具有“感知”人的能力。另一方面,车内交互方式从仅有“物理按键交互”升级至“触屏交互”、“语音交互”、“手势交互”并存的状态,体验感更好。
自动驾驶域能够使车辆具备多传感器融合、定位、路径规划、决策控制、图像识别、高速通讯、数据处理的能力。自动驾驶域通常需要外接多个摄像头、毫米波雷达、激光雷达等等车载传感器来感知周围环境,通过传感器数据处理及多传感器信息融合,以及适当的工作模型制定相应的策略,进行决策与规划。域控制器的输入为各项传感器的数据,所进行的算法处理涵盖了感知、决策、控制三个层面,最终将输出传送至执行机构,进行车辆的横纵向控制。自动驾驶域所集成的功能基本不涉及机械部件,且与座舱域交互密切,并和智能座舱域一样需要处理大量数据,对算力要求较高,因此需要匹配核心运算力强的芯片,来满足自动驾驶的算力需求,简化设备,大大提高系统的集成度。
车身域将集成传统 BCM 功能和空调风门控制、胎压监测、PEPS、网关等功能,未来率先与智能座舱域融合。传统的车身控制器(BCM)功能主要包括内/外部车灯、雨刮、车窗、车门、电子转向锁等的控制,通过CAN/LIN与各个小节点进行通讯,节点较多,线束设计、软件控制逻辑均较复杂。而车身域控制器对车身节点实现了功能和零部件的集成,对于各个车身电子进行集中控制,对采集到的信息进行统一的分析和处理,效率更高;技术上,车身域控制器要求传统 BCM 开发经验、硬件集成能力、软件架构能力、芯片保供能力,未来将集成网关以及一些低等级 ADAS 功能,并率先与智能座舱域实现融合。
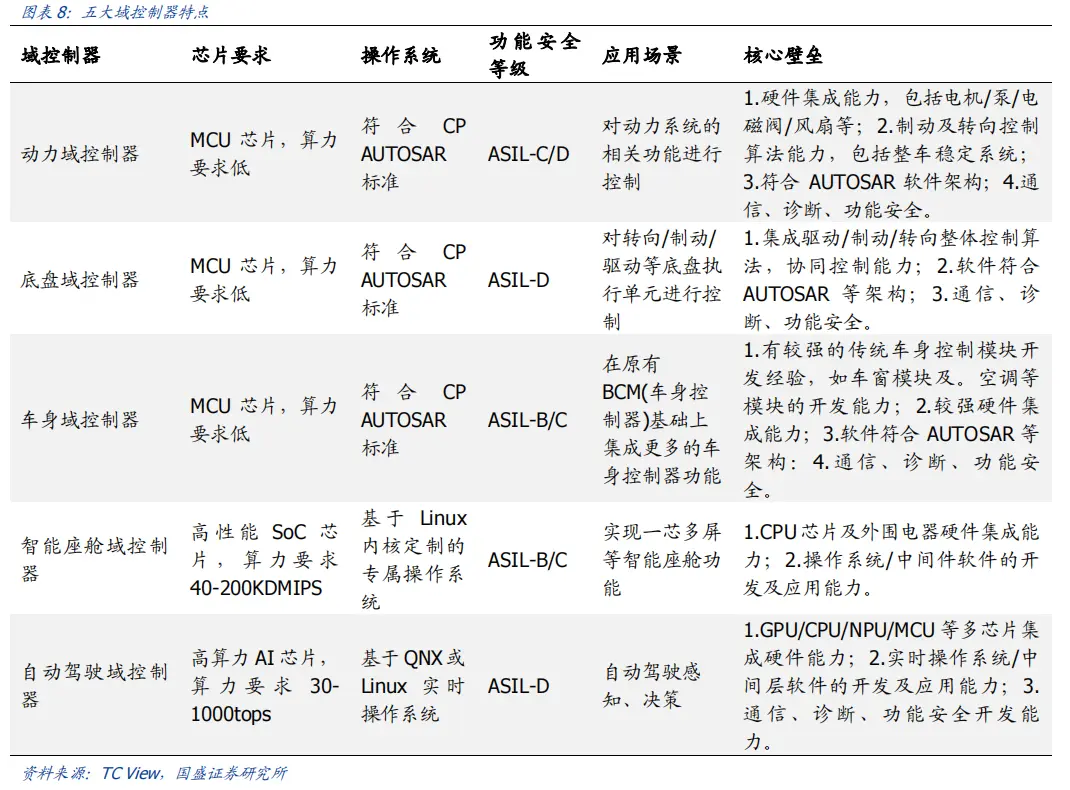
其中,智能座舱域、自动驾驶域是现阶段承载整车个性化智能体验的关键所在,也是目前车企的竞争焦点和布局重点。这两个域最能在整车端体现品牌的智能化差异,同时对传统功能系统供应链依赖度小;在现阶段迭代最快,其功能开发和实现需要涉及大量AI 运算,因此对芯片所提供算力、操作系统底层算法要求很高;而其他域控制器涉及整车安全的部件较多,因此对功能安全等级要求更高,对芯片算力要求和功能智能化程度相对较低。
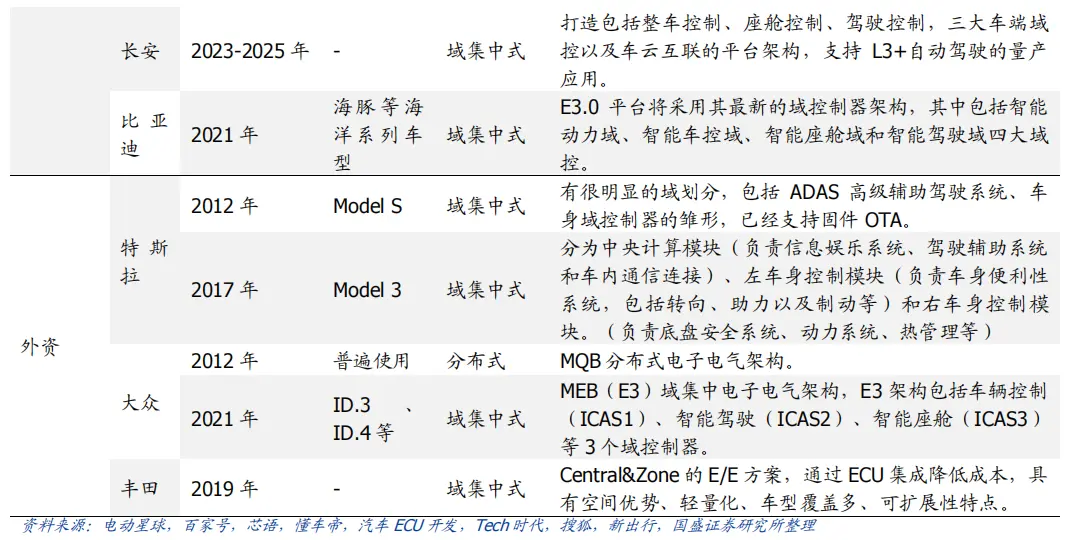
从供应端来看,在汽车整体分布式架构集中化的进程中,由中控系统升级而来的智能座舱域与新兴的自动驾驶域的供应体系较为完整;而其他域则是对传统功能系统的进一步集成,涉及的供应商繁多,更容易产生利益冲突,且随着电子模组件实现规模生产后的降价趋势,未来价值增量有限。未来,底盘域、动力域、车身域有望进一步集成,按照车身区域进行“区域域”集成,向车辆集中式架构进一步发展。



从结构上来看,域控制器主要由硬件(主控芯片和元器件等)和软件(底层基础软件、中间件以及上层应用算法)构成,其功能的实现主要来自于主控芯片、软件操作系统及中间件、应用算法软件等多层次软硬件之间的有机结合。
来源:电控知识搬运工













