力和压力系数
本文通过力系数来表示每种车型的空气动力性能:



其中Qref是参考动压,A是模型表1中的前向面积。力和力矩通过来自负载传感器的六个输出信号(测量持续时间的平均值)来计算,这些信号通过校准矩阵组合,以提供传感器坐标系中的六个单独的力/力矩值。本文未给出力矩系数数据,以限制发现的冗余性。滚转和偏航力矩系数的趋势与侧向力系数的趋势相似,而俯仰力矩的趋势与升力的趋势相似。数据以车身轴坐标系呈现,其中阻力指向下游,从驾驶员角度看,侧向力指向右侧,升力向上。
表面压力系数是通过以下方式计算得出的:
其中参考压力Pref是风洞中模型安装位置不受干扰的静压。本文还给出了两个压力系数差参数:一个表示与零横摆角度条件的差值(ΔC P,yaw0)),另一个表示与孤立车辆条件的差值(ΔC P,iso))。
在大多数单车测试条件下,模型阻塞约为1%,因此未对力系数进行阻塞修正。在测试段中,邻近模型测试的阻塞水平较高,可能需要阻塞修正才能获得真正具有代表性的结果。然而,将其应用于多体系统并非易事,在此未进行尝试。基于假设的组合体积阻塞的阻塞估计值远小于由于邻近车辆效应而观察到的力和压力系数的差异,因此预计结果的趋势和大小是可靠的。
04 不确定性估计
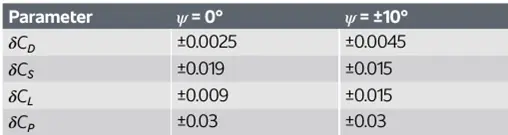
DrivAer Notchback模型作为样本案例来估计随机不确定性大小,因为在该大型测试活动中,该模型进行了最多的重复测试运行(六次重复)。这些随机不确定性通常被发现随着横摆角度的增加而增加。偏差误差不确定性是根据仪器供应商指定的不确定性大小进行评估的。测量不确定性的主导成分是重复DrivAer Notchback测试评估的运行间随机变异性,其中包括至少两次完全拆卸和重新安装模型。这导致与测量差异相关的不确定性(例如,δΔC D,rand))与主要测量不确定性(例如,δC D,rand))处于同一数量级。样本不确定性估计值见表2。
表2 低横摆角和高横摆角下力和压力系数的误差估计值(95%置信度)
测试矩阵与案例组合
本文进行了两组实验来研究相邻车道邻近效应,一组以DrivAer模型为主要模型,另一组以AeroSUV模型为主要模型。研究中选定的邻近位置范围为纵向±2个车身长度,横向定位为车道宽度的±25%。所有测试均在风速为50 m/s的条件下进行,对应的基于长度的雷诺数为2.3×10^6。
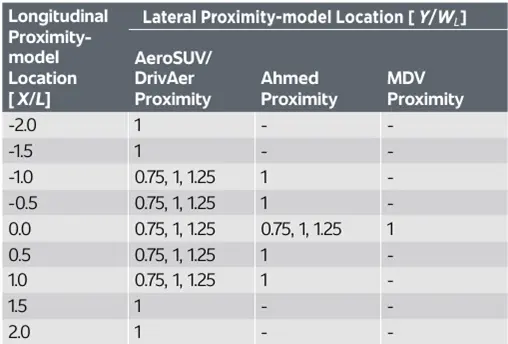
对于与主模型距离在±1 车辆长度范围内的邻近模型,进行了±10°范围内的自动偏航扫描,增量步长为 2.5°。对于更大的纵向间距,即最大到±2 车辆长度,由于安装轨道较长,在测试期间可防止偏航运动,并且需要在每次测试条件之间关闭风力。对于这些更大的距离,由于数据收集时间较长,数据是在相同的±10°横摆角度范围内获取的,但增量步长为 5°(而不是 2.5°)。如表 3 所示,DrivAer 和 AeroSUV 主模型研究的测试程序是相同的,唯一的区别在于哪个是主模型,哪个是邻近模型,因为只有单个 DrivAer 模型和单个 Aero-SUV 模型可用。纵向(X)和横向(Y)坐标分别通过模型长度(L)和一般车道宽度((WL = 3.7 米全尺寸,0.555 米模型尺寸)进行归一化处理。
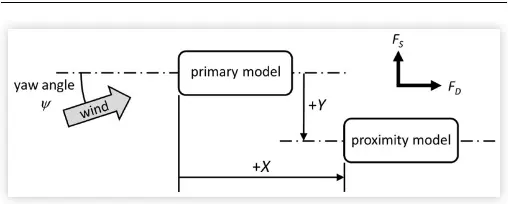
图8提供了总体布局和位置命名。正X位置表示主模型后面的接近模型,负X位置表示主模型前面的接近模型。使用DrivAer进行的大多数接近模型测试都是使用相邻车道位置的AeroSUV进行的,反之亦然。对于AeroSUV测试,使用艾哈迈德模型作为每个的次要接近模型。
表 3 用于 DrivAer 模型和 AeroSUV 模型研究的测试矩阵,以及相邻车道接近模型(相对于主模型的接近模型中心的相对纵向位置(车辆长度的 L)和横向位置(车道宽度的 WL))
来源:AutoAero













