VUT的行驶道路为一段直道连接半径为500m的弯道。VUT以80km/h的速度直线行驶,如图L.37所示
智能限速系统(ISLS)测试
测试场景1:智能限速显示ISLD测试
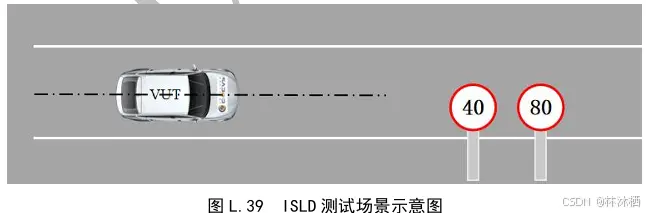
测试道路为至少包含一条车道的长直道,并于该路段道路一侧设置限速标志牌(40km/h,80km/h),如图L.39 所示。测试车辆在车道中央沿直线行驶,选择车道时应满足车辆纵向中心线与道路一侧标志牌立柱的横向距离在≤5m。试验开始时,车辆以低于限制速度(5±1)km/h 的车速行驶;车辆尾部平面距离限速标志牌至少100m时试验开始,车辆尾部平面越过限速标志牌时试验结束
测试场景2:智能限速提示ISLI测试
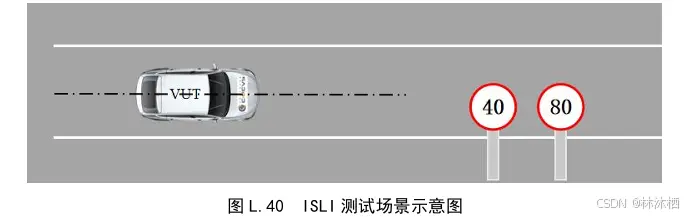
测试道路为至少包含一条车道的长直道,并于该路段道路一侧设置限速标志牌(40km/h,80km/h),如图L.40 所示。测试车辆在车道中央沿直线行驶,选择车道时应满足车辆纵向中心线与道路一侧标志牌立柱的横向距离在≤5m。试验开始时,车辆以高于限制速度(10±1)km/h 的车速行驶;车辆尾部平面距离限速标志牌至少100m时试验开始,车辆尾部平面越过限速标志牌时试验结束
盲区监测系统(BSD)测试
测试场景1:BSD C2C直线道路目标车超越试验车辆测试
试验车辆以50km/h速度匀速直线行驶,目标车辆以60km/h速度匀速直线行驶并保持与试验车辆的横向距离为1.5m(两车近车侧,不包括后视镜),目标车辆从侧后方驶入试验车辆盲区,如图L.42所示。当试验车辆后端与目标车辆前端的纵向距离为33m时,试验开始,当目标车辆的前缘超越试验车辆图L.41所示C线3m时,试验结束。单侧试验完成后在试验车辆另一侧重复进行该试验
测试场景2:BSD C2C直线道路目标车辆并道试验车辆场景测试
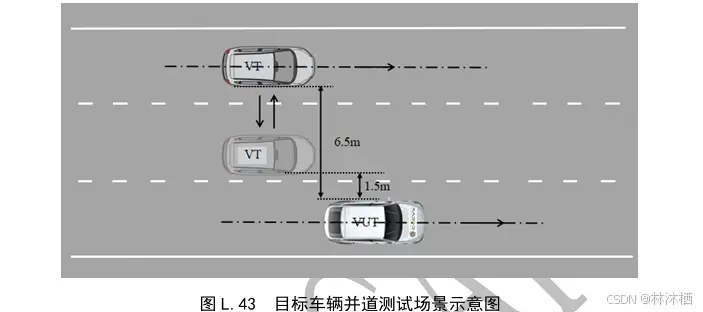
试验车辆以50km/h速度匀速直线行驶,目标车辆以50km/h速度行驶并保持与试验车
辆的横向距离为6.5米(两车近车侧,不包括后视镜)。当目标车辆越过图L.41所示B线,且完全在C线之后时,以(0.5±0.25)m/s的侧向速度分别从试验车辆侧后方进行变道,直至两车的横向距离为1.5m(两车近车侧,不包括后视镜)。变道完成后,确保目标车辆仍然越过B线且完全在C线之后,目标车辆至少保持直线行驶300ms,然后变道返回最初相对位置,试验结束,如图L.43所示。单侧试验完成后在试验车辆另一侧重复进行该试验
测试场景3:BSD C2TW直线道路二轮车超越试验车辆测试
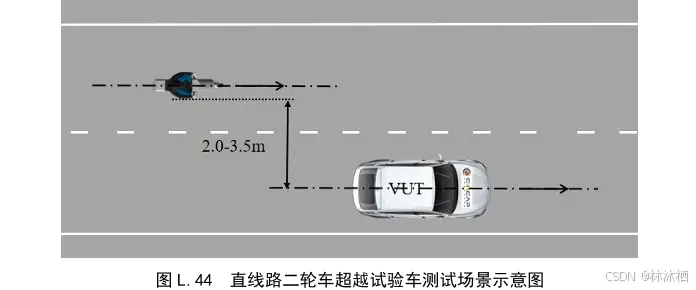
试验车辆以30km/h速度匀速直线行驶,踏板式摩托车目标以40km/h速度匀速直线行驶,由侧后方驶入试验车辆盲区并超越试验车辆。行驶过程中应保持踏板式摩托车目标最外缘(近试验车侧,不含后视镜)与试验车辆中心线之间的距离为2.0m~3.5m。当试验车辆后端与踏板式摩托车目标前端的纵向距离为33m时试验开始,当踏板式摩托车目标超越图L.41中C线3m时试验结束,如图L.44所示。单侧试验完成后在试验车辆另一侧重复进行该试验
测试场景4:BSD C2TW直线道路二轮车并道试验车辆测试场景
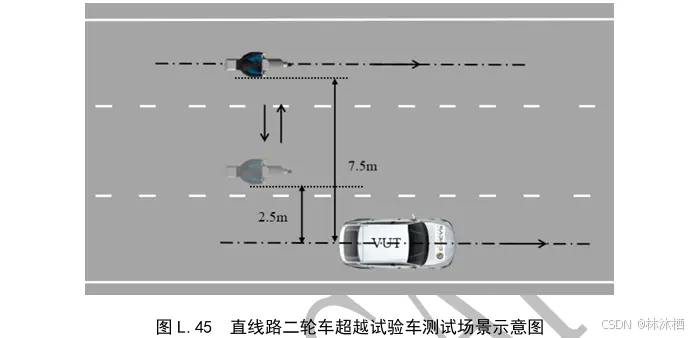
试验车辆和踏板式摩托车目标均以25km/h的速度匀速直线行驶,行驶过程中应保持踏
板式摩托车目标的最外缘(近试验车侧,不含后视镜)与试验车辆中心线之间的横向距离为7.5m。当踏板式摩托车目标越过图L.41中的B线,且完全在C线之后时,以(0.5±0.25)m/s 的侧向速度从试验车辆侧后方进行变道,直至踏板式摩托车目标的最外缘(近试验车侧,车辆另一侧重复进行该试验。不含后视镜)与试验车辆中心线之间的横向距离为2.5m,踏板式摩托车目标至少保持直线行驶300ms,然后变道返回最初相对位置,试验结束,如图L.45所示。单侧试验完成后在试验
来源:汽车测试网






