02、原地(坦克)掉头功能的基本原理
原地(坦克)掉头功能是电动汽车的一项智能驾驶辅助技术,能够使车辆在极其狭窄的空间内完成调头操作,甚至可以实现车辆在原地不移动的情况下绕自身中心轴旋转,解决传统车辆因转弯半径受限而无法灵活掉头的问题。
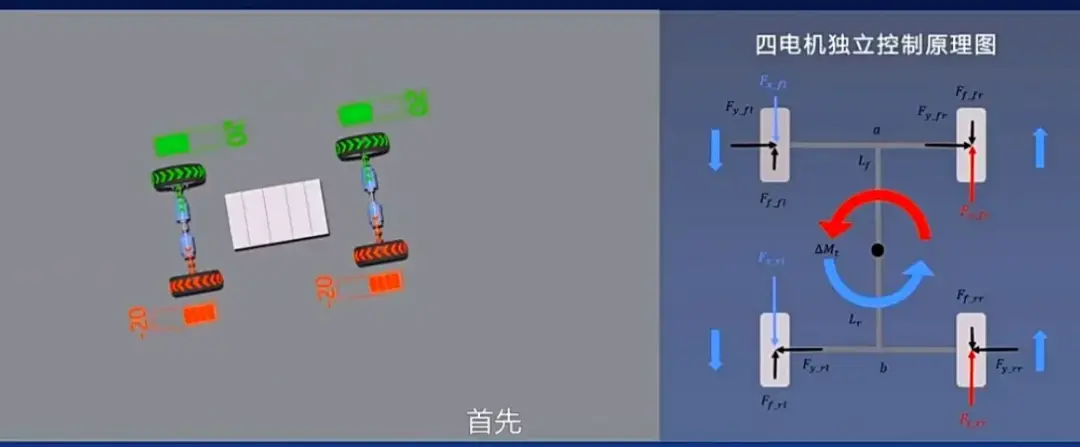
这一功能的核心在于通过动力系统独立控制左右两侧车轮,实现车辆的反向扭矩输出,从而完成原地旋转操作:
反向驱动左右车轮:系统根据驾驶员的调头指令,同时控制车辆左右两侧车轮分别向相反方向旋转。例如,左侧车轮正向转动,右侧车轮反向转动,从而产生围绕车辆中心轴的旋转力矩。
精准动力分配:通过高精度动力分配机制,系统实时调整每个车轮的转速和扭矩,确保旋转过程平稳流畅,避免打滑或偏移。
这种方法使车辆无需向前或向后移动即可完成掉头,大幅提高了空间利用率和车辆的灵活性,特别适合在狭窄道路或复杂地形中使用,同时降低了驾驶员的操作难度。
2.1 电动汽车的优势
电动汽车因其动力系统的独特性,为原地(坦克)掉头功能的实现提供了显著优势:
电驱动系统的精确控制能力
独立动力输出:电动汽车通常采用电机驱动,不同于传统内燃机需要复杂的传动结构。电机可以单独控制每个车轮的扭矩输出,从而实现更灵活的动力分配和精准的车轮速度调节。
即时响应:电机驱动系统响应速度极快,可以根据实时数据对各车轮的动力输出进行毫秒级调整。这种快速响应确保了车辆在执行原地(坦克)掉头操作时的平稳性和精准性。
高效制动控制:电动汽车的再生制动功能不仅能回收能量,还能精准控制车轮制动力,有助于实现锁死车轮的稳定性。
动力分配的灵活性,无需复杂的机械结构改动
无中央差速器的限制:传统四驱车辆依赖机械差速器进行动力分配,而电动汽车通过电子控制单元直接控制前后轴或各车轮的动力输出,避免了复杂的机械改动。
多模式适配:电动汽车的动力系统可以灵活调整前后轴的输出比例,实现单轴驱动、双轴驱动甚至四轮独立驱动,从而更好地适应不同掉头需求。
结构简化:电机和控制单元能够在不增加额外硬件的情况下完成原地(坦克)掉头所需的动力控制,降低了系统复杂性和成本。
原地(坦克)掉头功能的实现得益于电动汽车在动力控制方面的技术优势。通过精确灵活分配动力,电动汽车能够轻松完成传统车辆难以实现的掉头操作。这一功能不仅展现了电驱动技术的灵活性和高效性,也为电动汽车在狭窄空间中提供了显著的竞争优势。
来源:汽车电子与软件
作者:北湾南巷













