2.2 实用场景与用户体验
原地(坦克)掉头功能的实用场景涵盖城市、郊区及特殊环境中的多种复杂驾驶条件,其简便的操作方式和强大的适应性,不仅显著提高了驾驶便利性,还为用户提供了更加安全、智能的出行体验。这一功能代表了汽车智能化发展的又一重要方向,也将成为未来高端电动汽车的标配功能之一。
狭窄街道或巷道中的掉头
在城市中,许多小街道和巷道因设计初衷并未考虑到现代车辆的掉头需求,尤其是对于SUV或长轴距车辆而言,传统方式掉头可能需要占用多条车道或多次前后移动调整车身,既费时又存在安全隐患。
配备原地(坦克)掉头功能的电动车可以在极小的空间内完成调头操作,特别适用于单行道、老城区狭窄街巷或复杂的支路网络,有效提升驾驶灵活性。
停车场等空间有限的环境中轻松调头
停车场尤其是地下停车场的设计通常存在空间限制,驾驶员可能因视野受限或空间不足,难以快速完成调头。

原地(坦克)掉头功能可以帮助车辆快速完成调头,即便在柱子或其他障碍物密集的狭窄区域也无需反复调整,显著提高停车和出库效率。
特定场景中的应急操作
在狭窄山路、隧道或施工区域中,可能因前方道路中断或特殊情况需要调头。传统车辆需耗费大量时间前后倒车,而原地(坦克)掉头功能能够帮助驾驶员快速脱困,增强操作灵活性。
对于紧急车辆(如消防车、救护车等),原地(坦克)掉头功能可在狭窄环境中节省宝贵时间,提高救援效率。
家庭和社区使用场景
在居民区内,狭窄的巷道或社区停车位之间的空间可能难以满足普通车辆掉头的需求。原地(坦克)掉头功能可以让驾驶员轻松应对这些挑战,特别适合驾驶大尺寸车辆的家庭用户。
03、应用案例
中国第一汽车股份有限公司提出了一种车辆的控制方法、装置、计算机可读存储介质及车辆(申请号:202411087315 .4),特别针对车辆的原地掉头功能进行了详细的设计和说明。以下是详细解析:
3.1 发明背景与目的
背景:原地掉头功能,即坦克掉头,允许车辆在原地进行转向,主要应用于狭窄空间内的停车和脱困。当前技术多关注如何实现该功能,但忽略了使用性能,如控制准确率。
目的:解决相关技术中对车辆进行原地掉头控制时控制准确率低的问题,提高控制效率和安全性。
3.2 发明内容
提出了一种车辆的控制方法,包括检测动力系统故障、检测车辆档位、获取并基于目标控制参数对车辆进行控制等步骤。
还提供了实现该方法的车辆控制装置、计算机可读存储介质、车辆以及计算机程序产品。
3.3 方法步骤
接收原地掉头指令后,首先检测车辆动力系统是否故障。
若动力系统正常,则检测车辆是否处于停车档位。
若处于停车档位,则获取原地掉头指令对应的目标控制参数,并基于这些参数对车辆进行控制。
控制过程中,若检测到周围存在障碍物或坡度过大,则停止控制并显示预警信息。
若在预设时间内未收到操作指令或接收到取消指令,则停止控制。
具体操作如下:
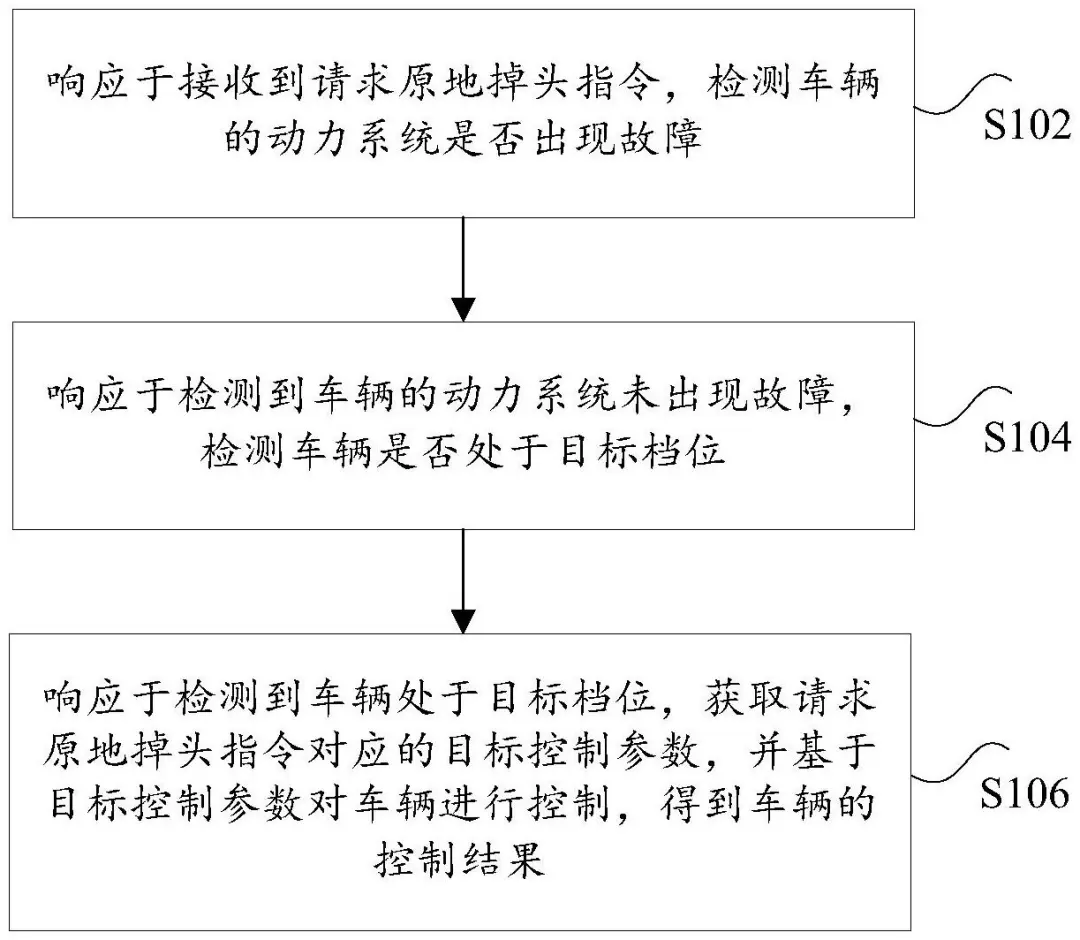
1. 步骤S102:检测动力系统状态
系统接收到用户通过中控显示屏发送的“请求原地掉头”指令,开始检测车辆的动力系统状态。
动力系统检测的范围包括电池组、电动机、控制器和传动系统。
电池组:提供电能来源,通常为锂电池或镍氢电池。
电动机:将电能转化为机械能,主要采用永磁同步电机或异步电机。
控制器:调节电机转速和扭矩,控制加速、制动等功能。
传动系统:将电动机的动力传递至车轮,通过变速器和传动轴实现动力输出。
如果动力系统出现故障,系统将停止执行原地掉头功能。
2. 步骤S104:检测目标档位状态
如果动力系统正常,系统继续检测车辆是否处于“目标档位”。
目标档位通常为停车档位(P档),确保车辆在原地掉头操作前稳定停驻。
若车辆未处于目标档位,系统会提示用户调整档位后重新尝试。
3. 步骤S106:获取目标控制参数并执行掉头
确认车辆处于目标档位后,系统获取与“原地掉头指令”对应的目标控制参数。
目标控制参数包括:
动力分配:调节各电机的扭矩输出。
转向控制:决定车轮的旋转方向。
系统依据目标参数执行控制操作,实现车辆围绕固定圆心完成原地掉头。
来源:汽车电子与软件
作者:北湾南巷













