——只有当系统能够确定与特定操纵相关的其他道路使用者在前方、侧面和后方的位置和移动,并且与他们有足够的距离来执行机动时,才允许绕过阻碍行驶车道的物体障碍物
——如果该操作会导致车辆部分或全部进入另一条车道,系统只有在能够确认有足够的空间和时间时才会这样做。这样就不会有迎面驶来的道路使用者妨碍系统完成转向适当行驶车道的机动。不得驶入与行驶方向相反的车道,超过以适当速度行驶的一般车辆。系统应在操纵期间启动方向指示
——系统不应向驾驶员建议操纵或执行系统发起的操纵,意图越过不允许越过的实心车道标志,除非是道路封闭施工
DCAS运行监控
1.制造商应保持监控系统运行引起的安全关键事件的过程
2.制造商应建立旨在收集和分析数据的监控程序,以便在可行的范围内提供DCAS在使用中的安全性能的证据以及本法规建立的安全管理体系要求的审核结果的确认证据
3.报告DCAS运行情况:
——安全关键事件的初步通知:
(a)制造商应毫不迟延地通知型式批准机构任何安全关键事件,制造商通过监测程序得知该事件,系统或其功能处于“ON”模式,或在安全关键事件发生前 至少5 秒内切换至“ON”模式
(b)对于能够进行系统启动操作的系统,适用的通知要求应适用于安全关键事件发生前最后 7 秒内该功能处于"ON"状态的任何实例
(c)初始通知可以仅限于高级数据,但应包含关于“ON”模式或已切换到“ON”模式的安全关键事件发生前最后 5 秒的功能的信息(例如,位置、时间、事故类型)
——安全重大事件短期报告:
(a)根据初始通知,制造商应调查事件是否与DCAS操作有关,并尽快将调查结果通知型式认可机构。如果系统的运行可能是事件的原因之一,另外,如果适用,制造商应通知型式批准机构针对DCAS设计的预期补救措施
(b)如果需要采取补救措施,型式认可机构应将此信息告知所有型式认可机构
(c)如果型式认可机构通过车辆制造商以外的来源(如其他型式认可机构)获知装有DCAS的车辆发生了重大安全事故,该型式认可机构可要求制造商以全面和可获取的方式提供事故的可用信息
——定期报告:
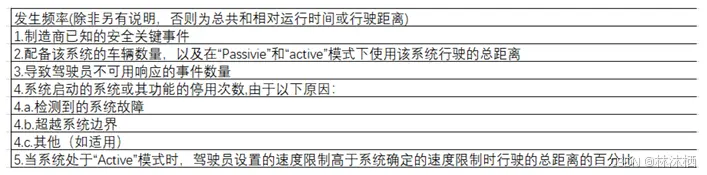
(a)制造商应至少每年向型式认证机构报告一次被认为是系统在现场预期操作和安全的适当证据的信息。制造商应至少报告下表所列信息。附加信息须经型式认证机构和制造商同意 ,如果系统在报告期内发生了与报告信息相关的重大变化,报告应区分系统的变化
场地或公共道路测试
备注:以上测试也可虚拟仿真验证,但仿真需进行可信度评估,可信度满足要求测试结果才可用
行驶车道内的定位
同ECE R79的居中和偏出测试
驾驶员主动变道
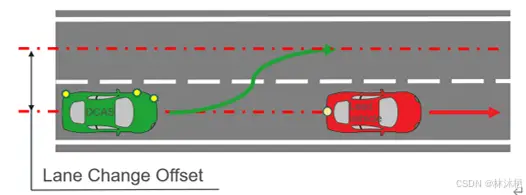
基础测试:该测试应确认制造商声明的系统的驾驶员主动变道能力
——在驾驶员启动 LCP 后,VUT 应向相邻车道进行完全变道(例如,3.5 m 横向位
移)
——在测试功能部分之前,VUT和领头车辆应沿同一方向直线行驶至少两秒钟,VUT
与领头车辆的中心线偏移不超过1米。
——试验应在前方车辆比 VUT的设定限速慢至少20 km/h的情况下进行
扩展测试:测试应评估系统在其边界条件/制造商声明的系统特征范围内安全变道时辅助驾驶员的能力:
(a) 前方车辆和VUT之间存在其他速度差;
(b) 在没有物理隔离的道路上;
(c) 在不禁止行人和骑自行车的道路上;
(d) 驾驶员启动变道后无法立即执行变道
——测试应至少执行:
(a) 在目标车道上有迎面或超车车辆的道路上;
(b) 不同的道路使用者从后方接近;
(c) 车辆在相邻车道旁行驶,防止变道;
(d) 在系统对开始驶入目标车道内相同空间的另一辆车做出反应的情况下,以避免潜在的碰撞风险
系统启动的车道变更
基础测试:该测试应确认制造商声明的系统启动变道能力。
——在系统启动 LCP 后,VUT 应向相邻车道进行全车道变换(例如,3.5 m 横向位
移)。
——在测试功能部分之前,VUT和领头车辆应沿同一方向直线行驶至少两秒钟,VUT
与领头车辆的中心线偏移不超过1米
扩展测试:测试应证明系统能够帮助驾驶员安全变道:
(a) 前方车辆和VUT之间存在其他速度差;
(b) 在没有物理隔离的道路上;和/或
(c) 在不禁止行人和骑自行车的道路上。
——测试应至少执行:
(a) 在目标车道上有迎面或超车车辆的道路上;
(b) 不同的道路使用者从后方接近;
(c) 车辆在相邻车道旁行驶,防止变道;
(d) 在系统对开始驶入目标车道内相同空间的另一辆车做出反应的情况下,以避免潜在的碰撞风险
前方车辆在直线路段上静止
基础测试:该测试应确认系统对直线路段前方静止车辆的申报响应能力。
——在测试功能部分之前,VUT应直线接近静止目标至少2秒,VUT与目标中心线的偏移不超过0.5米。
——测试的功能部分应从以下内容开始:
(a) VUT在本段规定的公差和横向偏移范围内以所需的测试速度行驶;和
(b) 与DCAS车辆开始对目标作出反应之前至少4秒的时间相对应的距离。
——在测试功能部分开始和系统干预之间,应遵守公差
扩展测试:测试应证明系统不会不合理地改变直线路段前方静止车辆的控制策略。
——试验应至少在以下条件下进行:
(a) 不同类型或类别的静止车辆;
(b) 位于VUT中心线较大偏移处的静止车辆;
(c) 面向VUT的静止车辆,用于能够在非公路条件下运行的系统
前方车辆在弯道上静止
基础测试:该测试应确认系统对弯曲路段前方静止车辆的申报响应能力。
——目标应位于目标车辆中心线和弯道周围车道中心线之间 0.5 米的偏移范围内
——在弯曲路段开始之前,VUT 车辆应在系统开启的情况下,以恒定速度沿完全标
记车道的直线段行驶,并保持足够的时间,以便横向控制在车道内占据恒定位置
扩展测试:测试应证明系统不会不合理地改变弯曲路段前方静止车辆的控制策略
——试验应至少在以下条件下进行:
(a) 不同类型或类别的静止车辆;
(b) 与车道中心位置偏移较大的静止车辆;
(c) 静止车辆与车道中心线的角度;
(d) 面向VUT的静止车辆,取决于能够在非公路条件下运行的系统
在直线路段上行驶速度较慢的车辆
基础测试: 该测试应确认系统对直线路段前方行驶速度较慢的车辆的申报响应能力。
——在测试功能部分之前,VUT 和目标应沿同一方向直线行进至少两秒钟,VUT 与目标中心线的偏移不超过0.5米。
——试验应在移动速度较慢的车辆目标比VUT慢50 km/h的情况下进行
扩展测试: 测试应证明系统不会不合理地改变直线路段前方行驶较慢车辆的控制策略
——测试应至少执行:
(a) 不同类型或类别的行驶速度较慢的车辆;
(b) 移动速度较慢的车辆,位于VUT中心线的较大偏移处;
(c) 速度较慢的车辆,与VUT的速度差较大
跟随前车,前车减速
基础测试: 试验应确认系统在直线路段上减速车辆的声明响应能力。
——VUT和目标应以50km/h的速度沿同一方向直线行驶,VUT跟随目标,由系统保持稳定的跟随时间间隔,至少在测试功能部分前两秒,VUT与目标中心线的偏移不超过0.5 m
——试验应在车辆目标减速至4m/s2的情况下进行
扩展测试: 测试应证明系统不会不合理地改变直线路段上减速车辆的控制策略
——试验应至少在下列情况下进行:
(a)不同类型或类别的减速车辆;
(b)一辆减速车的位置与VUT的中心线有较大的偏移;
(c)减速速度较大的减速车辆;
(d)不同的VUT和目标速度
前车切出
基础测试:该测试应确认系统对前方M1类车辆切出的声明响应能力。
——切出的车辆应向相邻车道进行全变道(例如,3.5 m 横向位移),以避开静止车
辆目标,静止车辆目标后面的测量值表示变道开始,静止车辆对象前面的测量值表明变道结束。
——指示 TTC 是指当前方车辆开始变道时,前方车辆到达目标的 TTC。在操纵过程中,前方车辆不得使用指示器。
——切出车辆不得偏离其规定的路径超过±0.2米
来源:汽车测试网 作者:王文林












