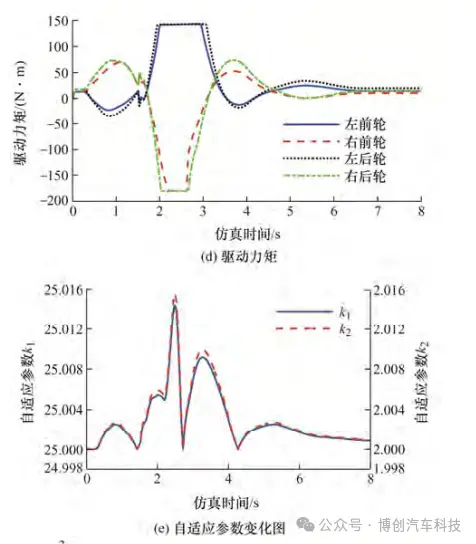
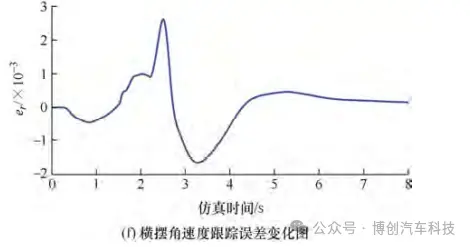
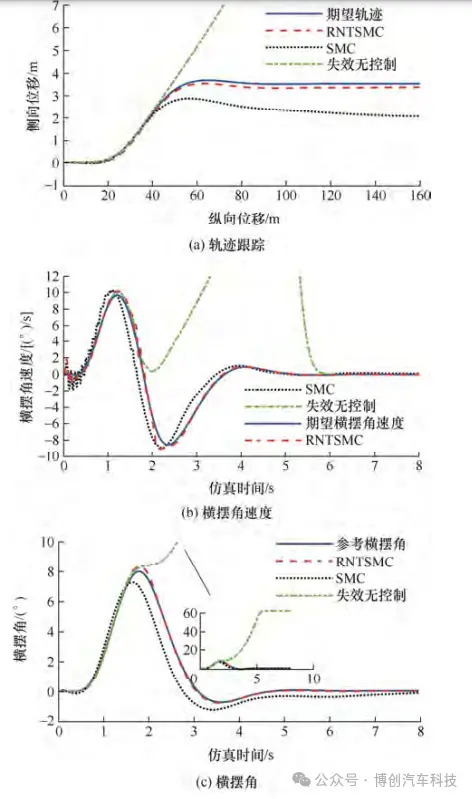
图 8 1.5 s 失效时 RNTSMC 控制仿真结果
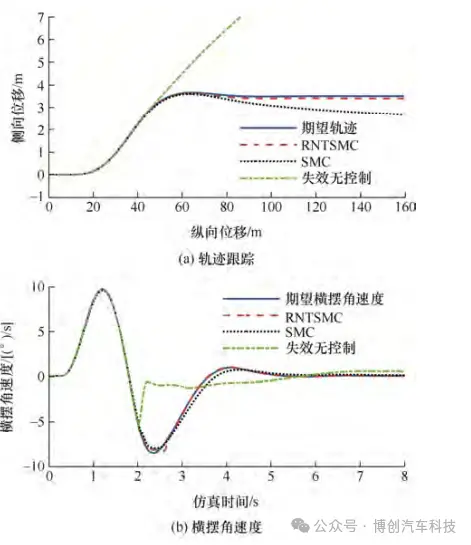
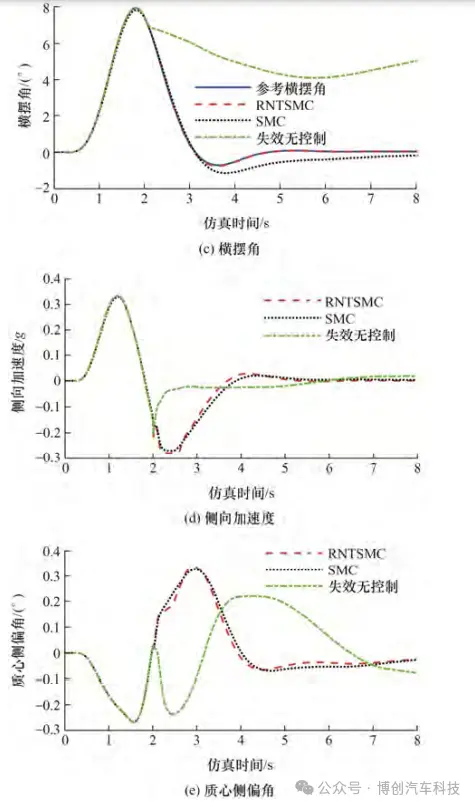
图 9 2 s 失效时仿真控制结果对比
4 控制器在环仿真验证
设计了如图 10 所示的控制器在环仿真平台,进一步验证所设计控制方法的有效性和实时性。该平台由 PXI 计算机、dSPACE 计算机、PXI 实时机、dSPACE 控制器以及电源组成。在进行控制器在环试验时,将控制算法编译成 C 代码部署于 dSPACE控制器中,作为车辆控制器;将车辆模型和仿真工况编译到 PXI 实时机中,搭建实时仿真环境。二者通过 CAN 总线进行通信,完成闭环控制。dSPACE计算机通过 ControlDesk 软件对 dSPACE 控制器发送控制命令;PXI 计算机通过 LabVIEW 实时测量PXI 实时机中车辆的状态信息。
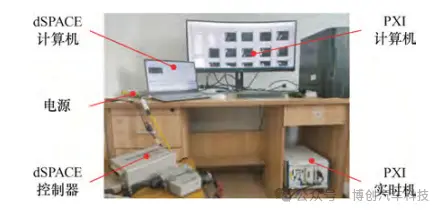
图 10 控制器在环仿真平台
为了验证控制效果,采用与仿真一致的工况进行控制器在环验证。三种控制方案在 1.5 s 失效和 2 s 失效时的试验结果分别如图 11~13 所示,根据图 11a、11c 可知,在控制器在环试验中,当 1.5 s 时发生左前轮转向失效时,所设计的 RNTSMC 控制的最大横向位置偏差和最大横摆角偏差分别为 0.18 m 和 0.37°,即使存在CAN通信延迟以及控制器采样周期的限制,仍然具有较好的控制精度;SMC 控制的最大横向位置偏差为 1.5 m,且仍有继续远离期望轨迹的趋势,最大横摆角偏差为 2°,偏差较仿真结果均有大幅度增加;而失效无控制的方案,由于不具备控制的鲁棒性,单轮转向失效后无法对执行机构合理分配,最终在 5.4 s 时控制器无解,车辆将以该时刻的最终状态继续行驶,车辆不受控制。相比于普通 SMC 控制,RNTSMC 控制最大横向位置误差降低了 88.1%,最大横摆角降低了 81.5%。由图 13a、13c 可知,当 2 s发生转向失效时,在控制器在环验证中,RNTSMC 控制较 SMC 控制仍然可以使车辆保持正常的轨迹行驶,具有较高的控制精度。由图 11 和图 13b、13d、13e 可知,容错控制下的横摆角速度、侧向加速度、质心侧偏角仍可以保持在较小范围的稳定区域,具有良好的横向稳定性。由图 13 可见,所设计的 RNTSMC 控制方案,在转向失效车辆回正的过程中,车辆状态较 SMC控制方案抖振较小,并且可以较快回归稳态。图 12 为RNTSMC 控制下的试验结果图,由图 12a、12b 可知,轮胎侧偏角仍处于线性区域,可以通过稳态转向的方式完成转向。由图 12c、12d 可知,由于发生单轮转向失效以及 CAN 通信延迟的影响,会使车轮转角产生一定的抖动,但所设计的 RNTSMC 控制方法均能在一定时间内快速恢复稳定,保证车辆正常行驶。
来源:博创汽车科技













