式中,Tij max 为轮毂电机的最大输出转矩。
当有执行机构发生失效时,需要重新设计式(43)中的约束条件以描述执行机构的失效情况,从而实现分配重构。本文不再考虑故障观测器的设计问题,假设当故障发生时,可以及时获取故障信息。引入失效因子 ξij,在本文中执行机构只有正常和失效两种状态,当转向电机发生失效时,认为转向电机完全失效,此时电机的输出力矩为零,车轮相当于万向轮,不再对该轮分配侧向力,故ξ=0,否则ξij=1。例如当左前轮转向电机发生失效时,约束条件中的拟分配的左前轮轮胎侧向力

四轮独立转向分布式驱动电动汽车的每个车轮上都装有轮毂电机以及转向电机,可以通过控制轮毂电机转矩和车轮转角来实现各个车轮所需提供的纵向力以及侧向力。
根据车轮力矩平衡,车轮的旋转平衡方程为

式中, ij J 为各车轮绕 y 轴转动惯量;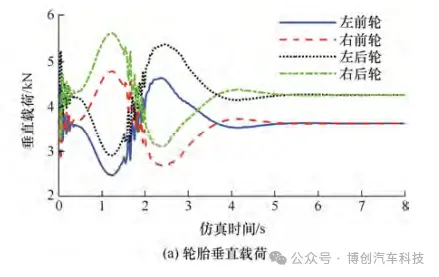 为各车轮的驱动力矩;fij为各车轮的滚动阻力系数。
为各车轮的驱动力矩;fij为各车轮的滚动阻力系数。
轮毂电机实际输出转矩 Tmij 与目标输出转矩 之间的转矩传递函数可以表示为[29]
之间的转矩传递函数可以表示为[29]

式中,ξ为与轮毂电机参数相关的阻尼比,通过试验拟合得到。
对于轮毂电机,不仅要考虑电机的动态响应,还需要考虑电机外特性曲线对于输出转矩的约束作用,如图 5 所示。
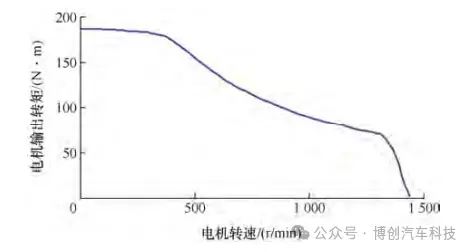
图 5 轮毂电机转速-转矩外特性曲线
结合式(42)、式(45)和式(46),并在电机外特性曲线的约束作用下便可以求得四个车轮的轮毂电机输出转矩。
轮胎侧向力的实现则需要轮胎侧偏特性逆模型将其转换为期望车轮转角,而后通过控制转向电机跟踪车轮转角完成。基于反正切函数,轮胎侧偏特性逆模型[38]如下,即期望的轮胎侧偏角
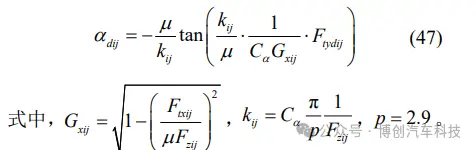
结合式(42)、式(47)和式(7)求得四个车轮的期望车轮转角 δdij。
3 仿真验证
为了验证所设计控制方法对四轮独立转向分布式驱动电动汽车单轮转向失效行驶稳定性的控制效果,选择中高速下单移线换道工况进行离线仿真验证。以失效后无控制和普通滑模控制(SMC)作为对比方案,以体现所设计控制策略对于转向失效后保持车辆行驶稳定性的效果。在失效无控制方案中,四轮驱动力矩平均分配,前后轮转角成比例分配,并假设同车轴转角相等;SMC 控制方案中,横摆角速度控制器采用和纵向、侧向速度控制器相同的普通滑模控制方法;RNTSMC 控制为本文所设计的控制方案。
测试工况为车辆以 72 km/h 车速在路面附着系数为 0.85 的道路上做单移线换道,输入方向盘转角如图 6 所示。由于在车辆行驶过程中,转向失效可能发生在任意时刻,本文分别随机设置在 1.5 s 以及2 s 时左前轮转向电机发生完全失效,即转向电机转矩输出降为零,此时转向失效车轮相当于万向轮。1.5 s 时刻车辆刚驶离原先车道,而 2 s 时刻车辆刚开始驶入换道车道,车身将要回正,在这两个时刻若发生转向失效极易发生交通事故并将严重影响车辆的稳定性,以此来检验控制方案的有效性。
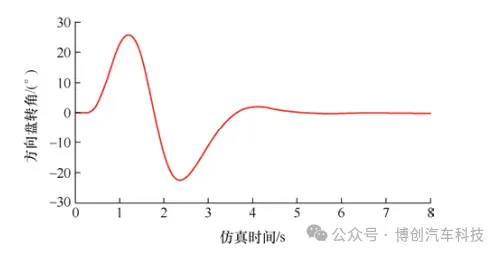
图 6 方向盘转角输入
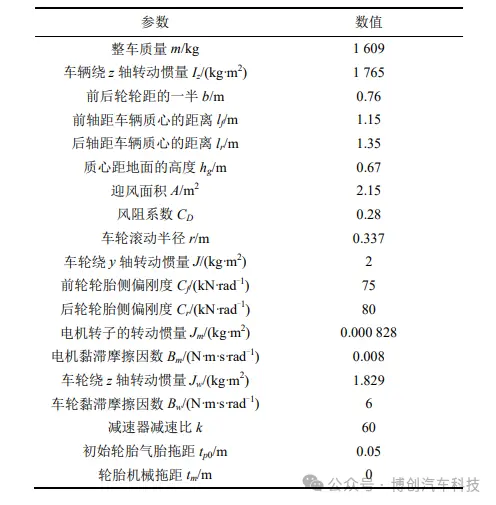
本文所研究的车辆参数[39-40]如表 1 所示。
表 1 车辆参数
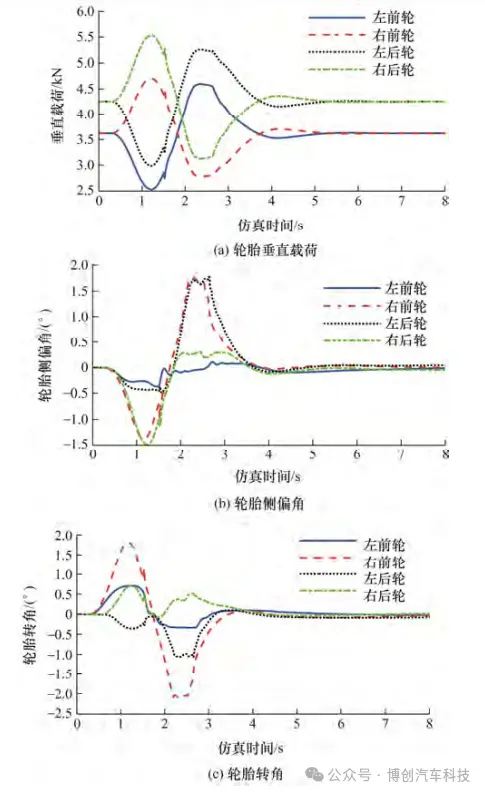
三种方案下 1.5 s 失效和 2 s 失效时车辆的状态如图 7~9 所示,7a、7b 和 9a、9b 表明,当单轮转向电机失效时,容错控制下的车辆仍然可以保持正常行驶下的期望轨迹和期望横摆角速度,而无控制的车辆则会在转向失效过后驶离期望轨迹,容易发生交通事故。从图 7c 和图 9c 中可以看出,由于RNTSMC 控制加入对横摆角速度积分项的跟踪,有效减少了横摆角的累积误差,相比于 SMC 控制,保证了轨迹精度和稳定性。其中,在 1.5 s 失效的情况下,RNTSMC 控制的最大横向位置偏差和最大横摆角偏差分别为 0.09 m 和 0.1°;SMC 控制的最大横向位置偏差为 0.6 m,且有远离期望轨迹的趋势,最大横摆角偏差为 0.55°。相比于普通 SMC 控制,RNTSMC 控制最大横向位置误差降低了 85.2%,最大横摆角误差降低了 81.8%。同样的,在 2 s 失效的情况下,RNTSMC 控制较 SMC 控制仍具有较高的控制精度。根据图 7d、7e 和图 9d、9e 可知,容错控制下车辆的侧向加速度和质心侧偏角仍处于较小的范围,可以保持较好的横向稳定性。同时图 7a~7e 和图 9a~9e 表明 RNTSMC 控制由于自适应参数的加入使其收敛速度更快、鲁棒性更强,可以较快且精准跟踪上期望值。图 8 为 1.5 s 失效时RNTSMC 控制下的仿真结果图。如图 8b 所示,当1.5 s 左前轮转向电机发生失效时,左前轮在回正力矩的作用下轮胎侧偏角趋近于零,此时在本文所设计的控制策略下,右前轮、左后轮分别通过增大轮胎侧偏角来保证车辆前轴和左侧所需的侧向力,保证车辆的横向稳定性。如图 8a 所示,在仿真过程中轮胎垂直载荷一直处于 2~6 kN,根据图 4 可知轮胎侧偏角一直处于线性区域,无须使用斜向行驶的方式来减小轮胎侧偏角,此时依靠稳态转向的方式即可完成转向。由图 8d 知,1.5 s 后,左前轮和左后轮通过增加驱动力矩来抵消车辆由于左前轮转向失效而产生的横摆力矩,保证车辆的横摆稳定性。同时,增加左前轮轮毂电机的驱动力矩可以减小车轮由于转向失效而来回摆动,最大限度降低由于转向失效而产生的恶劣影响。通过图 8e、8f 可知,由于误差|er| 一直处于较小的范围内,k1趋近于,k 趋近于 ,且一直保持 k1> k2,以保证系统的收敛速度,而当误差 |er| 有所增加的时候,k1 和 k2 通过动态调整以保证系统的稳定性,但 k2 以较快的增加速度以及较大的增长幅度使控制系统具有更快的收敛速度,快速达到平衡。
,且一直保持 k1> k2,以保证系统的收敛速度,而当误差 |er| 有所增加的时候,k1 和 k2 通过动态调整以保证系统的稳定性,但 k2 以较快的增加速度以及较大的增长幅度使控制系统具有更快的收敛速度,快速达到平衡。
来源:博创汽车科技













