18.1 引言
越野车辆动力学行为可以通过其机动性、操稳性和平顺性描述。机动性指用于车辆克服运动阻力,形成牵引力,爬坡、加速和制动的能力。操稳性主要涉及车辆执行驾驶员转向指令时的转向响应。平顺性则与车辆在地面不平度激励下的振动及其对驾驶员以及乘员影响有关。
当前,越野车辆有两种基本的行走机构:轮式机构和带机构。轮式越野车辆和道路车辆均使用轮胎作为行走机构,其功能要求明显不同。轮式越野车辆设计用于在非准备地面上行驶,车辆载荷作用下有明显的变形,而道路车辆设计用于铺装地面行驶,在类似的车辆载荷条件下,与非准备地面相比,地面变形相对小很多。对于重型越野车辆,通常采用履带作为行走机构,主要是为了获得较大的接地面积,从而降低地面上的接地压力。有趣的是,履带的概念在18世纪末首次构思为轮式车辆的“便携轨道”,铺设在负重轮前面的地面上,并且在车辆后部抬起时再放置在车辆前方使车辆行驶。由于带系统具有一些独特的特性履带越野车辆广泛用于越野行驶,本章将更多重点用于履带越野车辆动力学的讨论。
18.2 越野车辆机动性
评价不同类型越野车辆的机动性要使用不同的准则,这取决于功能要求。对于拖拉机,其主要的功能是拖拉各种工具或机器。因此,其牵引性能是主要兴趣点,可以通过牵引系数(牵引力与车辆自重的比)、牵引功率(牵引力与牵引速度的乘积)、牵引效率(牵引功率与驱动轮或链轮输出功率之比)表征。对于越野运输车辆,运输生产力(有效载荷与车速乘积)、运输效率(运输生产力与相应车辆的输出功率之比)通常作为评价其性能的基本准则。另一方面,对于军用车辆,则要求车辆在给定区域内特定的两点间的最大可能行驶速度作为评价其机动性的准则。尽管不同准则用于评价不同类型的越野车辆机动性,但是所有越野车辆都有一个基本要求,即其对非准备地面的机动性。广义的机动性,是指车辆通过松软地面、越过障碍、在崎岖地面提供乘员舒适性和涉水的能力。通过松软地面的能力是车辆机动性的基本要求,因此,车辆机动性、车辆设计参数和地面特性之间的关系分析是最重要的。
本章将重点放在讨论用于越野车辆机动性评价计算机仿真模型最新进展方面,包括轮式越野车辆和履带越野车辆。
如第17章所述,过去由于缺乏对车辆载荷下自然地面响应和复杂车辆-地面相互作用的理解,经验和半经验方法广泛用于越野车辆机动性的评价或预测。近年来,随着全球经济的发展,改善全球市场竞争已经逐渐成为行业关注的焦点。过去产品开发采用的经验方法已经变得极其低效和非常昂贵。为了获得竞争力,缩短产品开发周期至关重要。因此,虚拟产品开发(虚拟样机)被行业采用。为了成功实现这一过程,研发用于越野车辆性能和设计评价的现实的和全面的计算机仿真模型是必不可少的。为了适应这一要求,研发了一系列履带和轮式越野车辆计算机仿真模型[1,2]。相比于早期研发的经验或半经验方法,这些计算机仿真模型基于车辆-地面相互作用物理本质的详细分析,充分利用了应用力学的原理;考虑了车辆和行走机构的所有主要设计特征,也考虑了所有地面的相关特性,包括压力-沉陷关系和剪切特性以及重复载荷下的响应,如17.6.1节所述。
为了评价橡胶履带越野车辆或相对较短的链接履带块间距的越野车辆的机动性(这些车辆通常用于军用作战车辆和物流车辆),可以利用NTVPM模型进行研究[3-9]。在这种模型中,履带被理想化为一个弹性可以伸缩的带。对于履带块间距较长的刚性连接的履带车辆(这种车辆通常用于农业和建筑行业),可以利用RTVPM 模型进行研究[10-12]。在这种模型中,履带考虑为通过销连接的刚性连接系统。对于轮式越野车辆,包括轮式装甲车和拖拉机,可以利用NWVPM模型进行研究。这种模型考虑了车辆以及轮胎的所有主要设计特征,也考虑了后轮压过前轮车辙的多次重复通过的影响。
18.2.1 弹性履带车辆计算机仿真模型NTVPM
对于高速履带车辆,如军用战斗车辆、物流车辆和越野运输车辆,通常使用的是橡胶履带或履带块间距相对较短的履带。这类短间距履带系统的负重轮直径
与履带块间距之比范围通常为4~6,负重轮间距与带块间距之比为4~7,链轮节距直径与履带块间距之比是4的倍数。橡胶带和短间距履带将称为“弹性履带”,在分析车辆-地面相互作用时,将其理想化为弹性可伸缩的带。计算机仿真模型NTVPM可以用于进行弹性带车辆的性能和设计评价。其考虑了车辆的所有主要设计参数,包括车辆重量、履带系统构型、负重轮数量、负重轮间距、履带尺寸和几何、履带预拉力、履带纵向弹性、悬架特性、质心位置、链轮布置、惰轮布置、支撑轮和车辆外壳形状(用于分析车辆外壳-地面相互作用,当履带下陷大于车辆的离地间隙后,车辆外壳会与地面接触)。所有地面特性,包括压力-沉陷的关系、剪切特性和重复载荷下的响应,详见文献[1-9]。NTVPM可以预测履带-地面相互作用下的法向和剪切应力分布、外部运动阻力、推力、挂钩牵引力和车辆稳态行驶条件下的牵引效率与履带滑移率的函数关系,特别适用于竞争性设计的评价、车辆设计参数的优化和从牵引性能角度选择候选车辆。NTVPM的基本特性已经通过各种类型的地面全尺寸车辆的试验验证,包括矿区地面、有机地面、冰雪覆盖地面。文献[1-3]概述了NTVPM 的基本方法。
18.2.1.1 履带下法向压力分布预测
如前所述,在NTVPM研发过程中,履带被处理为一个弹性可伸缩的带。稳态行驶条件下,履带-负重轮系统在变形地面上的行驶,如图18.1所示
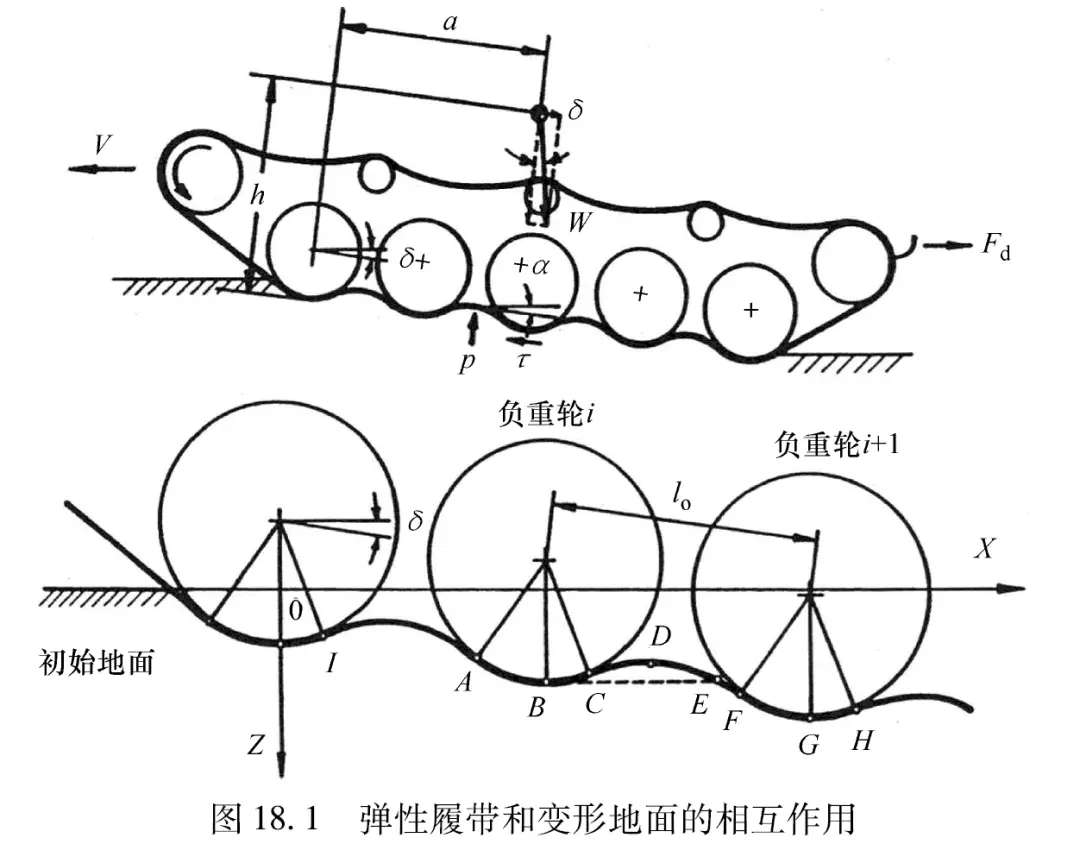
当履带车辆停在硬路面上时,履带平铺在路面上。相反,当车辆行驶在变形地面上时,法向载荷通过履带系统作用到地面上,造成地面变形。两负重轮间的履带承受载荷,结果其发生变形和具有曲线形状。前后负重轮之间的履带实际接
地长度相比于硬地面下的长度增加。这会导致履带顶部的凹陷减少和履带张力的变化。在这个模型中,考虑了履带在张力作用下的伸张。
与地面接触后,履带发生变形,其变形可以分为两个部分:一部分是与负重轮和地面的接触部分,如图18.1所示的AC和FH,另一部分是只与地面接触部分,如图所示的CF。与负重轮接触的履带形状,如AC,由负重轮的形状定义而只与地面接触的履带形状,如CF,由履带拉力、负重轮间距、压力-沉陷关系和重复载荷下的地面响应确定。
沿着AB,作用在地面上的压力从A到B逐渐增加,从B到D,压力对应于图17.5所示的重复载荷循环的卸载部分逐渐减小。沿着DE,压力再次逐渐增加,对应重复载荷循环的再加载部分。经过了与B点同一水平的E点之后,沉陷大于B点。结果是压力增加,后续负重轮的沉陷将大于前续负重轮的沉陷这导致假设车辆处于前高后低的状态。在G点之后,作用在地面上的压力又开始降低,另一个卸载-再加载循环开始。
对于高度压缩的地面,如新鲜、厚厚的积雪,履带沉陷可能大于车辆的离地间隙。如果这种情况发生,车辆外壳会与地面接触,将承受部分车重。这将减少履带携带的载荷,将对摩擦地面上车辆的牵引性能产生不良影响。而且,车辆外壳与地面的接触会产生附加的阻力分量--腹部阻力。车辆外壳-地面的相互作用特性及其对车辆性能的影响在NTVPM中已经考虑。在这种模型中,充分考虑了负重轮独立悬架的特性,扭杆悬架、油气悬架的非线性特性以及其他因素可以
容纳到模型中。基于前述对履带-地面相互作用物理本质的理解,导出一组作用在带-负重轮系统上的力与力矩平衡方程,用于评价整个履带。其确定了与地面接触的变形履带、车辆设计参数和地面特性之间的关系,这组方程的解定义了负重轮的沉陷、车身倾斜、履带拉力和与地面接触的履带形状,由此和考虑压力-沉陷关系以及地面的重复载荷响应,可以预测履带车辆稳态运行的法向压力分布。
18.2.1.2 履带剪切应力分布预测
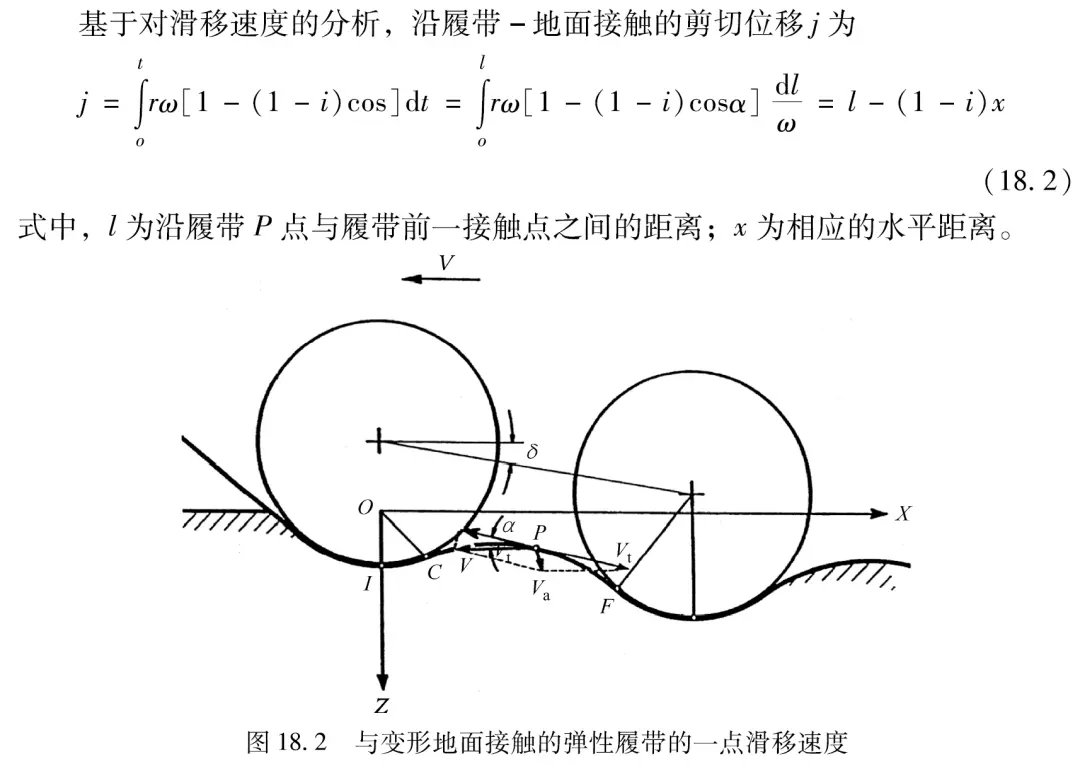
履带车辆的牵引性能与履带-地面接触的法向压力和剪切应力分布密切相关。如17.6.1.2节所讨论的,剪切应力与剪切位移相关。为了预测剪切应力分布,应当先确定履带下的剪切位移。弹性履带下的剪切位移可以通过对履带-地面接触的滑移速度Vj进行分析得到,弹性带某一点处的滑移速度对应于绝对速度Va的切向分量,如图18.2所示。滑移速度Vj大小为

18.2.1.4 试验验证
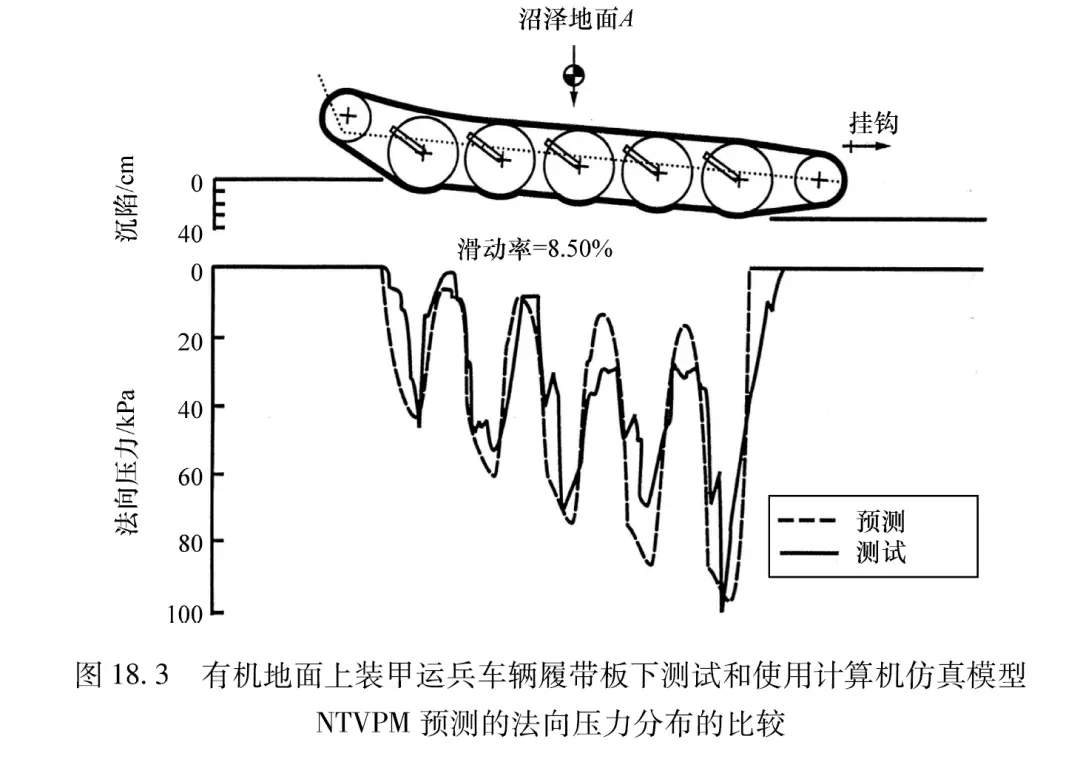
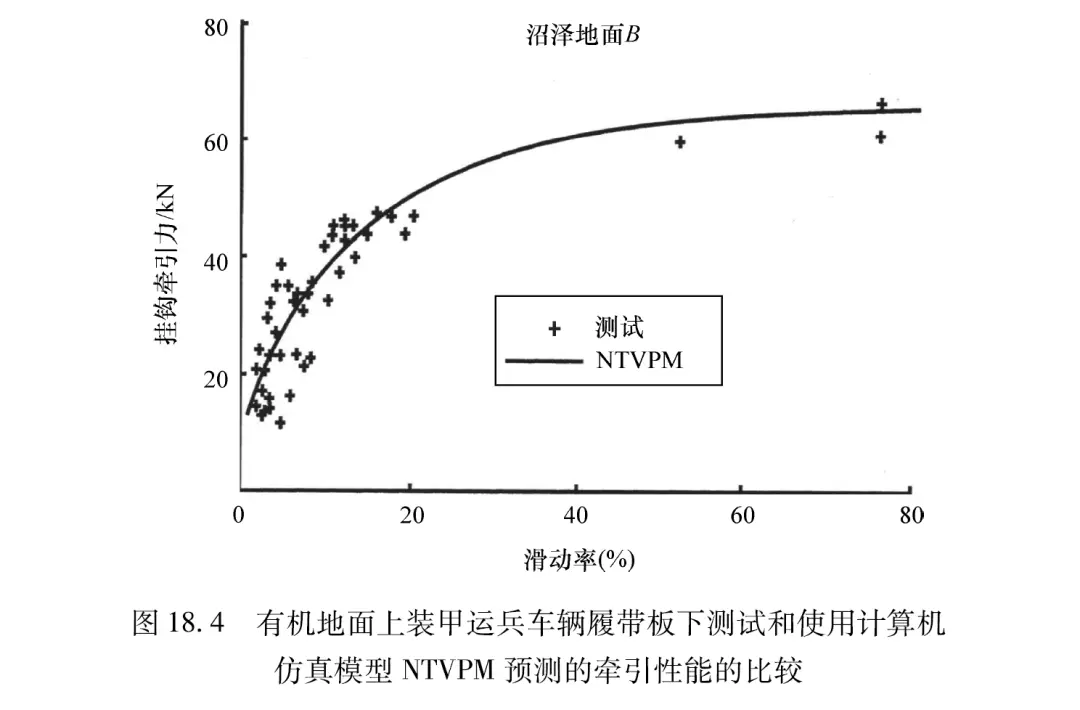
NTVPM基本特性已经通过整体和两个铰接的带车辆在各种未准备地面上的场地测试数据进行了验证,包括矿山地面、有机地面、雪覆盖地面等。作为实例,图18.3和图18.4分别给出了在有机地面上装甲运兵车辆带板下测试和预测的法向压力分布和牵引特性的预测和测试结果的比较,更多的验证测试结果在文献[1-3]给出。
18.2.1.5 应用
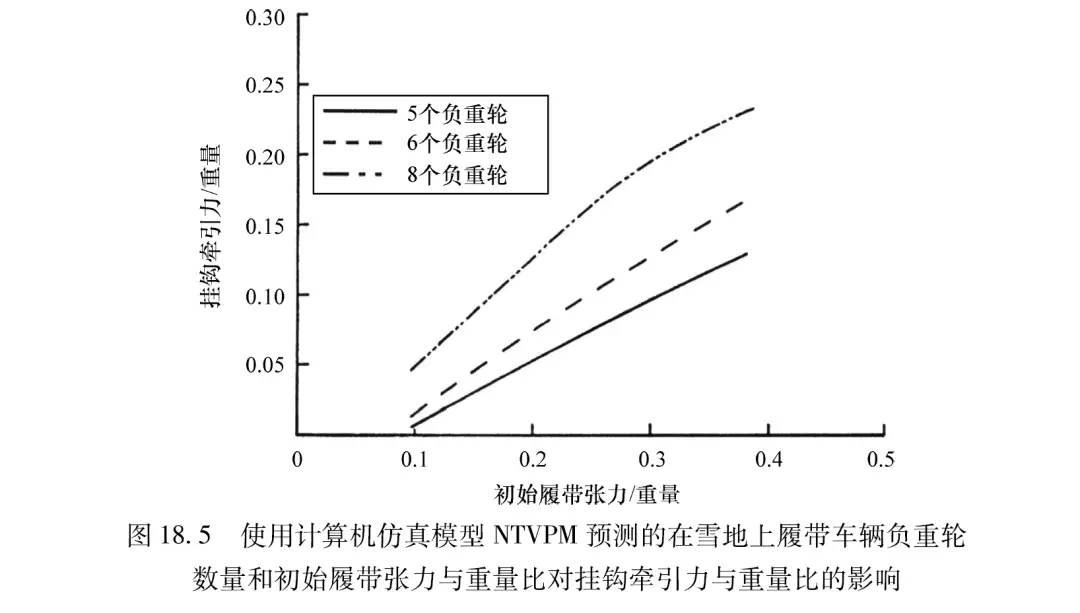
NTVPM 可以用于评价车辆设计、地面条件对车辆性能的影响,也可以用于参数分析和设计优化。例如,图18.5为利用NTVPM预测的负重轮数量和初始履带张力对装甲运兵车在深雪上挂钩牵引力与重力比值的影响[1,2,4]。由图18.5可以看出,负重轮数量和初始履带张力对车辆在松软地面的机动性具有显著的影响。对于一个给定的车辆,大多数情况下通过适当增加初始履带张力可以大大提高车辆在松软地面的特性,这取决于悬架设置[1,2,4,5]。对究导致了驾驶员控制、中央初始履带张力调节系统的发展。
在正常地面上,驾驶员将初始履带张力设置为常规水平。然而,当预期穿过松软地面时,驾驶员可以很容易将初始履带张力提高到适当水平,以改善车辆机动性。这个系统已经引入到许多高机动性的军用作战车辆中。中央履带张力调节系统对带车辆机动性的影响,与中央轮胎充气系统对轮式车辆机动性影响相似。
NTVPM已成功用于帮助车辆制造商研发新产品,辅助北美、欧洲、亚洲和非洲政府机构选择目标车辆。
18.2.2 刚性连接履带车辆计算机仿真模型 RTVPM
对于低速履带车辆,如用于农业和建筑业的车辆,刚性连接带通常使用相对长的履带间距,这种类型的履带系统的负重轮直径与带间距比低至1.2,负重轮间距与履带间距比典型为1.5。这种类型的带称为“刚性连接履带”,可以处理为通过销连接的刚性连接系统。
开发了计算机仿真模型RTVPM,用于刚性连接带车辆的性能和设计评价。其考虑了车辆的所有主要设计参数,包括车重、带系统配置、负重轮数量、负重轮间距、履带尺寸和几何、初始履带张力、重心位置、链轮布置、惰轮布置支撑辊轮布置和拉钩位置。由于将履带连接考虑为刚性的,因此带不可伸长。RTVPM模型中使用的地面参数与NTVPM的地面参数是一样的。
18.2.2.1 模型研发的基本方法
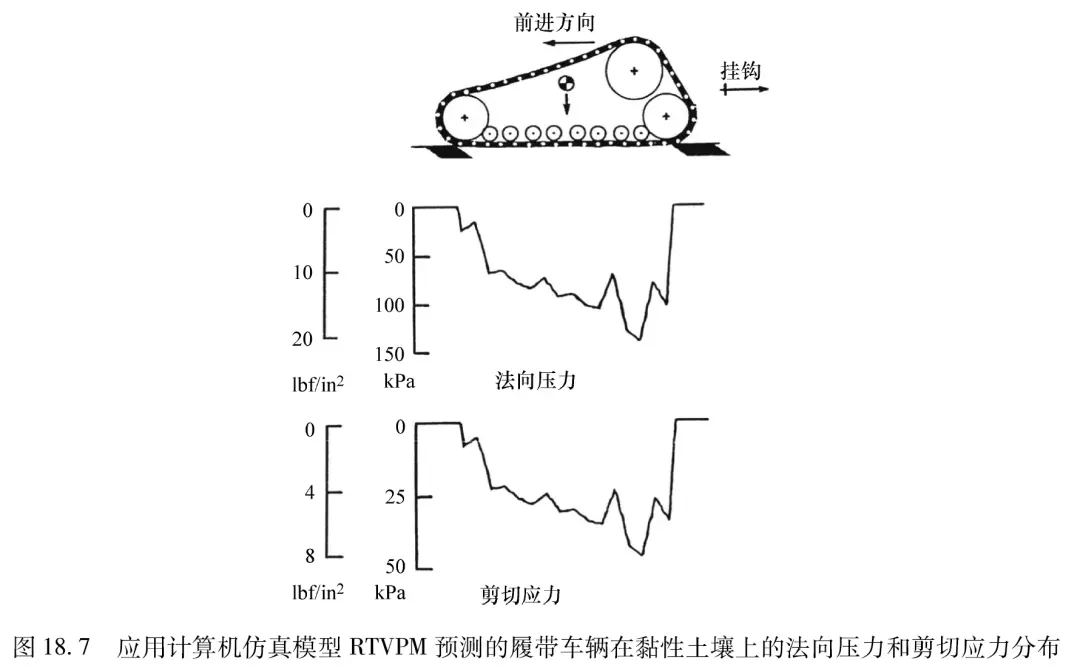
如前所述,RTVPM模型将履带处理为由无摩擦销刚性连接的系统,如图18.6所示。假设负重轮、链轮和支撑辊轮与车辆结构刚性连接,然而前轮中心安装在预压缩弹簧上。
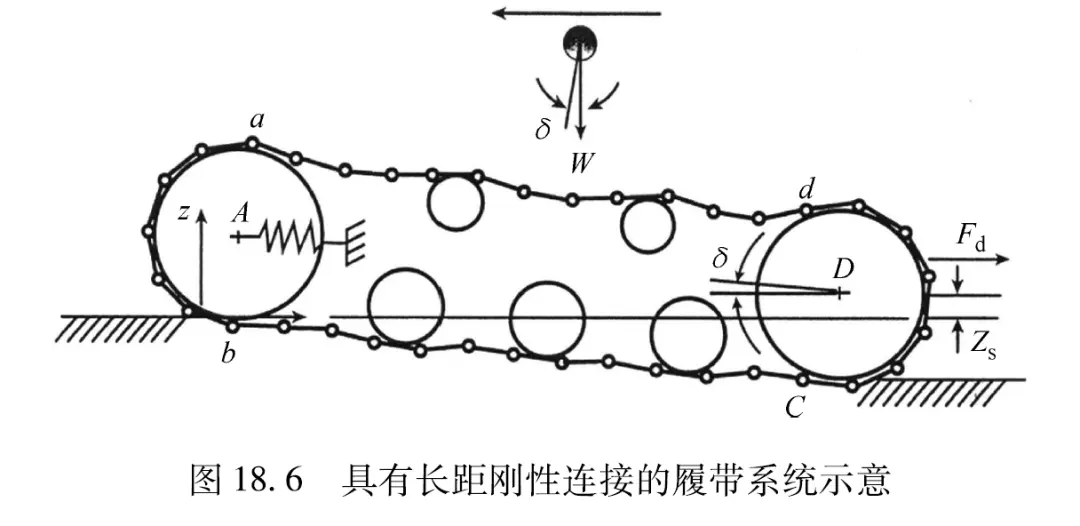
在分析中,将履带系统分为四部分:由轮支撑的带上部运行部分、与负重轮和地面接触的履带下部运行部分、与惰轮接触的履带部分和与链轮接触的履带部分。通过考虑履带系统各个部分之间的平衡、履带下部运行部分与地面之间的相互作用和各个履带部分的边界条件,可以建立一组方程。作为带滑动率函数,这组方程的解确定出履带沉陷、履带系统倾角、履带和地面之间接触的法向压力和剪应力分布、履带运动阻力、推力、挂钩牵引力和车辆牵引效率。应用RTVPM预测的具有8个负重轮带车辆在黏性土壤上的法向压力和剪切应力分布[1,2],如图 18.7 所示。
18.2.2.2 试验验证
RTVPM 的基本特性已经通过场地测试数据进行了验证。图18.8给出了在建筑业使用的重型车辆测试和预测的挂钩牵引力系数(挂钩牵引力和重量之比)的比较,地面为干燥、盘状、砂质土壤,图中的测试数据由美国伊利诺伊州皮奥瑞亚的 Caterpillar Inc(卡特彼勒公司)提供。
由图18.8可以看出,应用RTVPM预测的车辆挂钩牵引力系数与测试数据一致性较好。这表明该模型能够用于具有长距连接履带车辆性能的实际预测。
18.2.2.3 应用RTVPM可以用于评价车辆设计和地面条件对车辆性能的影响,也可以用于刚性履带车辆参数分析和设计优化。RTVPM用于设计评价时,可以通过确定最佳负重轮间距与履带间距之比的实例演示。
为了评价负重轮间距与履带间距之比的影响,应用RTVPM预测三种履带系统的牵引性能。三种履带系统具有相同的履带接触长度,但是负重轮数分别为5、7、8,并目具有多种履带间距。研究发现,对于给定整体尺寸的履带系统负重轮间距与履带间距之比是最重要的一个设计参数,它影响刚性连接带车辆的性能。图18.9给出了黏性土壤上20%时滑动率下挂钩牵引力系数随负重轮间距与履带间距之比的变化。

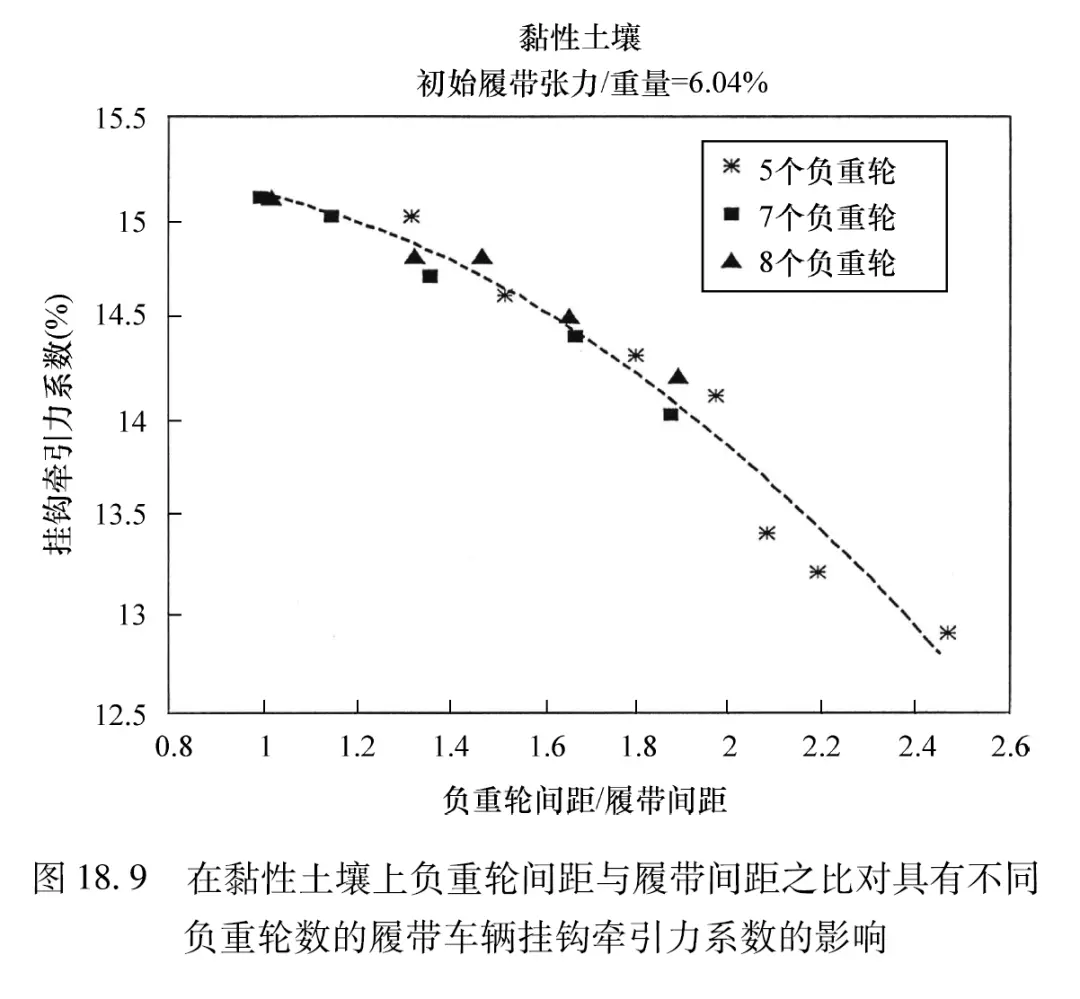
由图18.9可以看出,只要负重轮间距与履带间距之比是类似的,负重轮数从5变化到8时,三种履带系统的牵引性能也是类似的。在性土壤地面上,负重轮间距与履带间距之比的优化值接近于1。这意味着,对于给定的带间距车辆设计人员应当选择合适的负重轮间距以优化车辆性能。应当指出的是,履带间距也会影响车辆前进车速的波动,因为多边形(或弦形)会影响链轮与带连接。多边形影响车辆的速度波动为
18.2.3 越野轮式车辆计算机仿真模型 NWVPM
计算机仿真模型NWVPM用于越野轮式车辆性能的开发和设计评价,包括军用轮式车辆、农业和建筑业用的拖拉机和越野运输轮式车辆,也可以用于对给定任务和运行环境选择合适的轮胎。该模型考虑了车辆所有的主要设计特点,包括车重、轴荷分配、悬架刚度、车轴的功能(驱动或非驱动)、轮距、动态轴荷转移、轮胎重复通过的影响(前后轮轨迹相同)、轴距、重心位置、牵引挂钩位置等。该模型也考虑了轮胎所有的设计特点,包括轮胎直径、断面宽度、断面高度、凸肩面积与胎体面积之比、凸肩高度、胎压、硬地面上平均接触压力、轮胎结构(子午或斜交)。
NWVPM可以用于预测车轮-地面接触处的法向压力和剪切应力分布轮胎内部(与轮胎材料相关的滞后)和外部运动阻力、推力、挂钩牵引力和稳态行驶条件下车辆牵引效率与滑动率的函数关系。该模型采用的地面参数与NTVPM或RTVPM 是相同的。
18.2.3.1 模型开发的基本方法首先,NWVPM预测各个轴上轮胎(刚性或弹性)的运行模式,使用17.7.2部分描述的方法。然后,评价轮胎-地面接触法向压力分布,考虑了压力-沉陷特性和地面重复载荷响应。基于法向压力分布,预测给定轮胎滑移率下轮胎-地面接触的剪切应力分布。遵循17.7阐述的方法,考虑了剪切应力-剪切位移关系和地面重复剪切载荷的响应。
在给定轮胎滑移率下轮胎-地面接触的法向压力和剪切应力分布确定后,可以预测运动阻力、推力、挂钩牵引力和轮式车辆牵引效率作为滑移率的函数。遵循17.7阐述的方法,考虑了牵引载荷引起的动态轴荷转移。
18.2.3.2 试验验证
NWVPM的基本特点已经通过了场地数据验证。图18.10给出了拖拉机在留茬场地上试验和预测的牵引特性的比较!1,2]。留茬场地的地面数据在一定范围变化,图18.10中的两条实线代表留茬地的地面数据上限和下限预测的牵引特性。
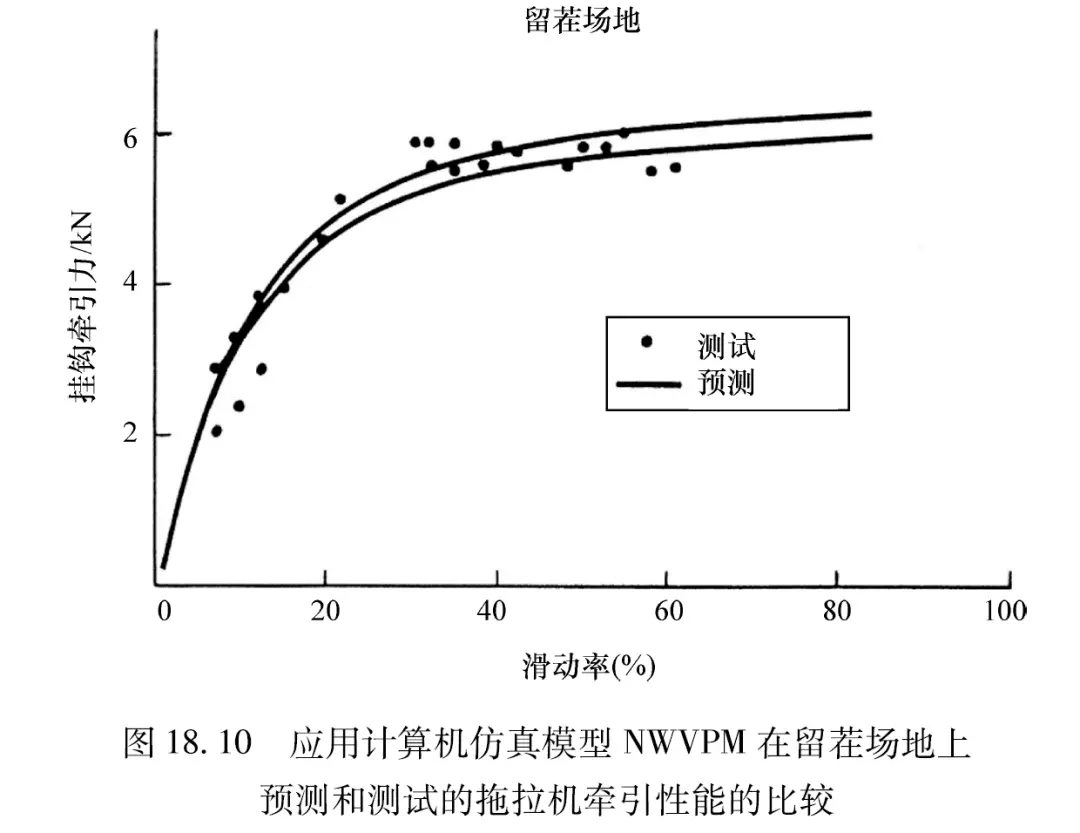
由图可以看出,应用NWVPM 预测的拖拉机牵引特性与试验数据可以很好吻合。这表明,该模型能够用于预测轮式车辆在场地上的牵引特性。
18.2.3.3 应用
NWVPM可以用于评价车辆和轮胎的设计参数、地面特性对车辆性能的影响,也可以用于针对给定的行驶环境选择合适的轮胎。
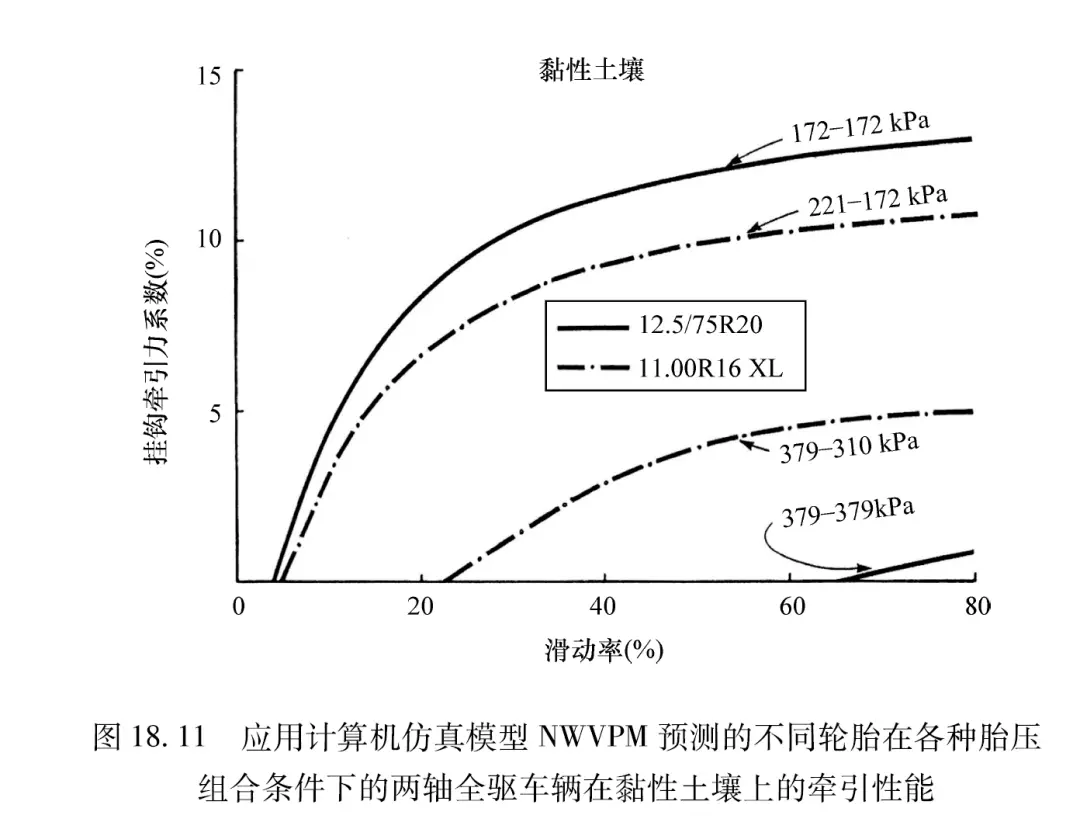
图18.11给出了应用NWVPM预测的两轴轮式车辆在黏性土壤上牵引特性的比较[2],轮胎为两种不同类型,前后轮胎以不同的胎压组合。由图可以看出轮胎类型和胎压对两轴车辆性能具有显著影响。例如,轮胎为12.5/75R20和前后胎压为 397kPa时,车辆本质上是不运动的;而前后胎压为172kPa时,车辆性能显著提高。轮胎为12.5/75R20和前后胎压为172kPa,轮胎为11.00R16XL前轮胎压为221kPa和后轮胎压为172kPa(这种前后轮胎胎压组合源于制造商的推荐),前者的车辆性能比后者更好。这表明,NWVPM模型在评价轮式越野车辆的性能和设计、针对给定车辆在特定地面行驶选择合适的轮胎方面可以发挥有效作用。
总之,前述计算机仿真模型是基于对地面行为、车辆-地面相互作用力学的理解。因此,在预测和评价越野车辆性能方面,其比早期发展的经验和半经验方法有了相当大的改善,这些模型在许多国家的行业和政府机构中获得越来越广泛的接受。
本文摘编自《车辆系统动力学手册 第2卷,整车动力学》 ,机械工业出版社出版,经出版方授权发布。
本丛书对车辆系统动力学建模、分析与优化,车辆概念和空气动力学,充气轮胎和车轮-道路/越野,车辆子系统建模,车辆动力学和主动安全,人机相互作用,智能车辆系统,以及车辆事故重建被动安全进行了全面描述。
本丛书由来自23所大学与9家知名企业的50余位专家共同编写,以科学界与工业界的视角对知识结构进行了平衡,代表了目前车辆系统动力学技术发展的水平,适合汽车工程师与汽车专业师生阅读使用。
来源:机械工业出版社













