在制动过程中,由反作用力和摩擦力引起的变形,会影响运动转换机构的传动效率,甚至造成干扰。为了减少这些力的影响,大陆网使用了制动片和主轴之间点接触连接的形式。制动片由两端有球座的压力杆支撑。博世和现代使用滚珠轴承,球顶或弧顶实现点接触。图10显示了几种主要形式。
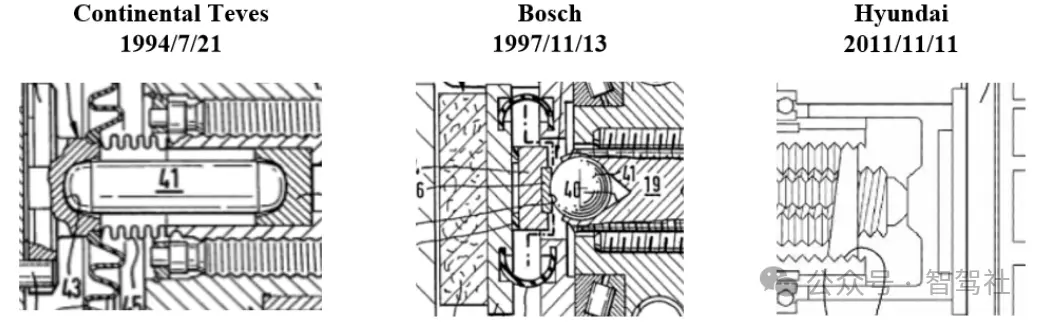
图 10. 点接触连接的主要形式
3.2. 运动转换机构
运动转换机构将电机的旋转运动转换为主轴或螺母的平移运动。运动转换机构主要有四种形式,包括丝杠、凸轮、滚珠坡道以及齿轮齿条驱动机构。
丝杠驱动机构通过由主轴和螺母组成的丝杠副来实现运动转换,它包含滑动丝杠、滚珠丝杠和滚珠丝杠副(滚子丝杠)这三种类型。滑动丝杠结构简单,但传动效率和精度较低,容易自锁且磨损严重。滚珠丝杠和滚珠丝杠副(滚子丝杠)通过滚珠或滚子将滑动摩擦转变为滚动摩擦,它们具有更高的传动效率和精度,运动平稳且可靠性良好,这两种形式在机电制动(EMB)执行器中较为常用。此外,凸轮驱动机构也用于驱动施压部件,它结构简单且传力可靠,然而其高副接触容易磨损,无法传递较大的夹紧力。滚珠坡道驱动机构利用滚珠在坡道上的滚动运动来实现轴向平移。博世、现代和万都先后针对滚珠坡道提出了不同的结构方案。一种典型结构 [23] 如图 11 所示。滚珠坡道驱动机构结构紧凑,轴向尺寸较小,但设计较为复杂。
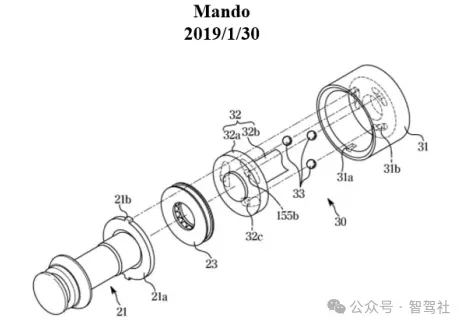
图 11. 万都的滚珠坡道驱动机构
3.3. 力放大机构
为了增大电机的驱动力,通常采用两种方案:(1)诸如直齿轮系、斜齿轮系、锥齿轮系、蜗轮蜗杆齿轮系、行星齿轮系、带轮等减速机构;(2)诸如楔形机构、杠杆机构等自增力机构。
3.3.1. 减速机构
在选择减速机构时,主要考虑结构布局、传动比以及效率等因素。直齿轮系用于平行轴之间的传动,其结构简单但传动比小。锥齿轮系用于相交轴之间的传动,锥齿轮的制造复杂且成本高。蜗轮蜗杆齿轮系用于交错轴之间的传动,蜗轮蜗杆传动比大且承载能力高,但传动效率低且容易磨损。行星齿轮系是一种应用广泛的方案,它可以通过不同的输入和输出部件组合来实现不同的传动比,其结构紧凑且承载能力高,但装配复杂。
3.3.2. 自增力机构一种典型的自增力方案是电子楔式制动器(EWB),它通过楔形机构将制动盘的切向摩擦力转换为压力。博世、西门子、现代和大陆特维斯都提出过不同的楔形自增力方案。如图 12 所示,依据楔面数量,可分为三种类型:单楔面机构、双楔面机构和多楔面机构。单楔面只能实现单向自增力效果,而双楔面和多楔面能实现双向自增力效果。多楔面机构产生的压力分布更均匀,但结构更复杂。由于自增力效果与位移并非线性相关,且受加工误差、磨损等诸多因素影响,楔形自增力方案产生的制动力较难控制。
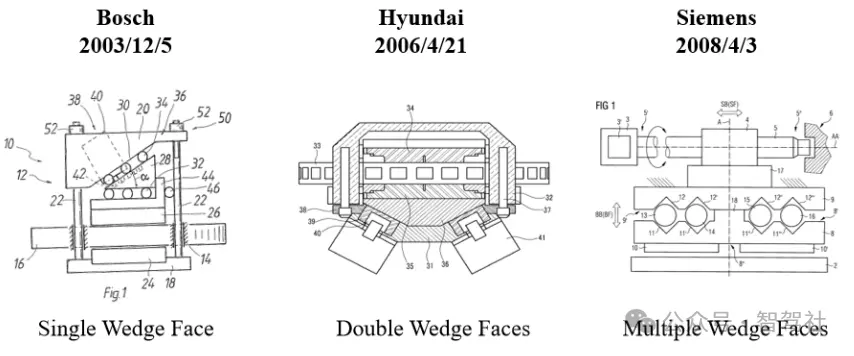
图12. 三种形式的楔形自能机构
3.4. 电机类型及布置图
3.4.1. 电机类型
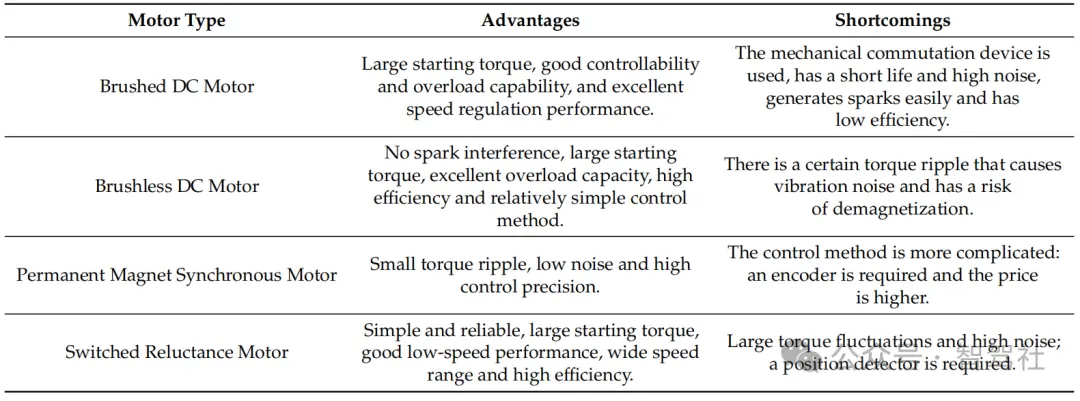
作为EMB执行器的功率输入,电机必须能够在锁定转子条件下长时间以大扭矩工作。此外,它还应具有小尺寸、低成本和良好的热稳定性。EMB执行器中常用的电机类型如表7所示。
表7.EMB执行器[3,27,28]中常用的各种类型的电机
电机结构分为两种类型:整体设计和空心设计
整体设计,即固体转子嵌套在定子内,转子端部轴向连接到其他部件以输出功率。如图13所示,该结构比较简单,但轴向或径向布局尺寸较大;
空心设计,即空心转子嵌套在转子中,转子与其他组件同轴连接到输出功率。该结构具有高度的集成性,轴向尺寸较小,但设计也比较复杂,适应性相对较差。
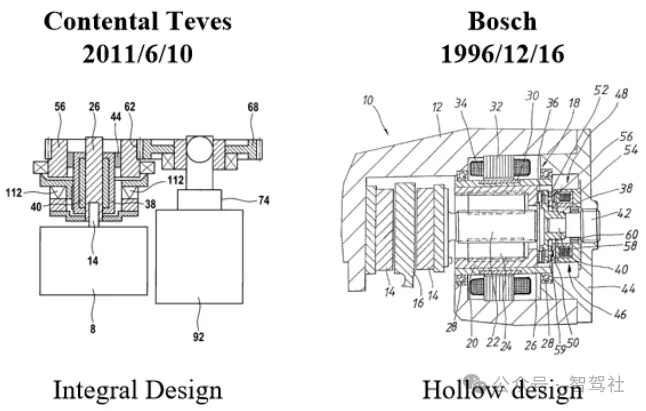
图13. 两种形式的电机结构设计
来源:智驾社













