1.背景
2.范围和定义
3.申请批准
4.批准
5.一般要求
6.DCAS功能的附加要求
7.DCAS运行监控
8.系统验证
9.系统信息数据
10.软件识别要求
11.系统安全要求
12.物理测试要求
13.模拟仿真要求
5.一般要求
作为附件3评估(11.系统安全要求)的一部分,并根据附件4(12.物理测试要求)中的相关测试,制造商应在安全方法检查期间向批准机构证明本段规定的履行情况。
(审核期间自证明,类似国内L2准入的40项申报参数及相关实验报告、声明/证明材料)
5.1 一般要求
5.1.1 根据5.5.4.2段的规定,DCAS系统的设计应确保驾驶员继续从事驾驶任务。
(容易被欺骗或不强监控驾驶员在环的DCAS系统,怕是会被鉴定为不满足法规要求。如:方向盘上放个橙子就不知道驾驶员是否脱离了;驾驶员遮挡了DMS摄像头,DCAS系统还能正常工作;驾驶员监控系统被关闭后,DCAS系统还能正常工作;驾驶员睡着了,DCAS系统还能正常工作)

5.1.2 DCAS系统的设计,应确保驾驶员安全驾驶意识并避免驾驶员过度依赖DCAS系统。这应通过履行第5.5.4段的规定来证明。
5.1.3 DCAS系统的设计,应防止驾驶员合理可预见的滥用和未经授权修改系统的软硬件组件。
5.1.4 DCAS系统应按照第5.5.3.4段的规定,随时为驾驶员提供安全超控override或停用DCAS系统的方法。
(驾驶员始终优先,开车的一定要注意力。一定要看清用户手册中罗列的override和停用方法。)
5.1.5 配备DCAS的车辆至少应配备高级紧急制动系统(AEB)。此外,它还应配备车道偏离预防系统(CSF/LDP/CDCF)或车道偏离警告系统(LDW)。这些系统应符合R131、R152、R79和R130号法规的技术要求和过渡规定,视情况而定,适用于配备DCAS的不同车辆类型。
R131 AEBS高级紧急制动系统法规解读及认证测试要求
万字长文,全面解读UN-R152 AEB法规
5万字详解R79法规对智驾功能的要求
R130 LDWS车道偏离报警系统法规解读及认证测试要求
5.2 DCAS与其他车辆辅助系统的交互
5.2.1 当DCAS系统处于“激活”模式时,其操作不得停用或抑制已激活的纵向紧急辅助系统(即AEBS)的功能。对于横向紧急辅助功能,DCAS系统可以根据涵盖此功能的相应法规停用或抑制紧急辅助系统。
5.2.2 DCAS与其他辅助系统或自动化系统之间的转换、系统之间的优先顺序以及任何旨在确保车辆安全和正常运行的其他辅助系统的抑制或停用,应在提交给型式认证机构的留档中详细描述。
5.3 功能要求
5.3.1 制造商应在留档中详细描述与单个特征相关的系统检测能力,特别是附件3附录3中列出的系统边界。
5.3.2 DCAS系统应能够根据需要检测、评估和响应周围环境,以在系统边界内实现系统的预期功能,并在超出系统边界的情况时尽可能评估和响应其周围环境。
5.3.2.1 DCAS系统应以适当的方式调整其行为以适应周围交通,以避免对交通流的干扰。
5.3.2.2 如果DCAS系统检测到碰撞风险,则应旨在避免或减轻碰撞的严重程度。
5.3.2.3 在不影响本UN法规其他要求的情况下,DCAS系统应控制车辆的纵向及横向运动,以维持与其他道路使用者的适当距离。
5.3.3 DCAS系统可根据系统的操作设计在必要时激活相关车辆系统(例如,方向指示器、雨天激活刮水器、除霜加热系统等)。
5.3.4 考虑到驾驶员的反应时间,系统的控制策略应设计成在保持可控(如第5.3.6段所述)的同时降低碰撞风险。
5.3.5 对系统边界的响应
5.3.5.1 当DCAS或DCAS的某个功能处于“开启”模式时,系统应旨在检测适用的系统边界。如果系统识别到超出系统或功能边界,它应转换到“待机”模式,并根据第5.3.5.2段中制造商描述的策略立即通知驾驶员。HMI要求需满足5.5.4.1段中的定义。
系统应以可控的方式终止受影响功能或系统向驾驶员提供的辅助。辅助终止策略应由车辆制造商描述,并根据附件3进行评估。
5.3.5.1.1 制造商应实施策略以避免“待机”和“激活”模式之间的快速切换(需做debounce防抖设计)。
5.3.5.2 作为第9节要求的留档的一部分,制造商应详细描述DCAS系统及其功能的系统边界条件,以及在检测到边界条件被超出、满足或接近时通知驾驶员的策略(根据第5.3.5.5段)。
5.3.5.2.1 描述应至少考虑附件3附录3中列出的潜在相关边界条件。
5.3.5.2.2 制造商应描述并在合理的情况下证明系统的行为、对系统性能的影响,以及在系统或其功能超出这些边界后仍保持“激活”模式时如何确保安全。
5.3.5.3 制造商应识别系统能够检测到的系统边界,并应描述系统能够识别系统边界的方法。
5.3.5.4 应记录系统无法检测到的任何声明的系统边界,并应证明无法检测不会影响系统或其功能的安全运行,以使审批机构满意。
5.3.5.5 当DCAS系统识别到车辆处于“激活模式”的某功能正接近其功能边界时,他应通知驾驶员,并留出足够的提前时间,以便驾驶员做出适当的反应。
5.3.6 可控性
5.3.6.1 DCAS系统应设计为确保系统的控制动作,包括但不限于系统故障、达到系统边界或系统切换到“关闭”模式时的控制动作,对驾驶员保持可控。这应考虑驾驶员的反应时间,包括从脱手状态恢复控车的情况,以确保驾驶员可以在任何时候(例如,在给定的操纵期间)安全地进行干预。
5.3.6.1.1 当动手请求HOR被抑制时,制造商应考虑驾驶员对驾驶员控制报警DCA做出反应,并保持转向控制所需的潜在反应时间。除非制造商能够证明通过特定策略确保了可控性,否则留给驾驶员的反应时间不得小于1s。
5.3.6.2 系统的设计应确保在规定的系统边界内,根据系统的能力实现可控性。如果动手请求HOR被抑制,系统应考虑到驾驶员脱手的情况。
制造商的可控性设计应向型式批准机构详细描述,并应根据附件3进行评估。
5.3.6.3 减速和加速
5.3.6.3.1 当由系统控制时,车辆减速和加速应保持对驾驶员和周围交通的可管理性(不扰乱交通流),除非需要增加减速水平以确保车辆或周围道路使用者的安全。(紧急情况下避撞)
5.3.6.3.2 当系统试图在没有外部干扰的情况下保持恒定速度时,应尽量减少车辆速度的不合理波动。
5.3.7 系统动态控制
5.3.7.1 车辆在行驶车道中的位置
5.3.7.1.1 当DCAS系统处于“激活”模式时,应协助将车辆保持在其行车道内的稳定位置。当处于“激活”模式时,系统应确保车辆在制造商规定的横向加速度值下不会离开行车道(参考过弯能力-B1-ACSF)。
5.3.7.1.1.1 DCAS系统应能够根据道路曲率调整车速,以实现保持在车道内这一目标(即弯道降速,B1-ACSF无此要求)。
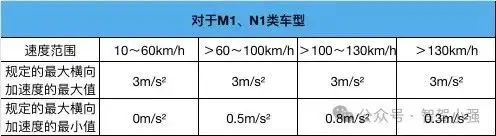
5.3.7.1.2 在边界条件下,激活的DCAS功能应确保车辆在任何时候都不会无意中越过车道标记,制造商规定的横向加速度值应在如下范围内:M1和N1类车辆的横向加速度值不得超过3 m/s²,M2、M3、N2和N3类车辆的横向加速度值不得超过2.5 m/s²。
车辆制造商规定的最大横向加速度值可能无法在所有条件下实现(例如恶劣天气、车辆安装的不同轮胎、横向倾斜的道路)。在这些其他条件下,该功能不应停用或不合理地切换控制策略(有可能因为轮胎磨损、道路倾斜等原因,车辆未达到规定的最大横向加速度之前就偏出了,过弯能力达不到申报值)。
不应停用或不合理地切换控制策略,不能因为提前识别到车辆可能偏出车道,不去努力保持,而直接退功能。
系统可以超过制造商规定的最大横向加速度,但超过部分不能大于0.3m/s²,M1和N1类车辆的横向加速度值不得超过3m/s² ,M2、M3、N2和N3类车辆的横向加速度值不得超过2.5 m/s²。[ay_max+0.3和3取小]
尽管有上述规定,但在不超过2s的时间段内,系统的横向加速度可以超过制造商规定的最大横向加速度值,而不超过40%;M1和N1类车辆的横向加速度值不得超过3.3m/s² ,M2、M3、N2和N3类车辆的横向加速度值不得超过2.8 m/s²。[ay_max*140%和3.3取小]
5.3.7.1.2.1 系统产生的横向加加速度在半秒内的平均值不得超过5m/s³(横向控制线型要求,同B1-ACSF)。
5.3.7.1.3 系统确定适当速度v和由此产生的横向加速度ay的策略应由型式认可机构记录和评估。
ay=v²/r
5.3.7.1.4 当系统达到第9.1.3款规定的边界条件时,在没有任何驾驶员输入转向控制的情况下,以及当任何车辆前轮胎开始无意地越过车道标记时(轮胎外沿出车道线外沿前),系统应通过提供车辆制造商安全概念中概述的尽可能大的持续帮助来避免突然失去转向支持。系统应通过光学警告信号以及声音或触觉警告信号清楚地告知驾驶员该系统状态。
对于M2、M3、N2和N3类车辆,如果车辆配备了符合UN ECE R130法规技术要求的车道偏离报警系统(LDWS),则视为符合上述警告要求。
来源:智驾小强