吉林大学汽车仿真与控制国家重点实验室组译,李杰教授领衔翻译,郭孔辉院士为手册作序。
本文摘编自《车辆系统动力学手册 第2卷,整车动力学》 ,机械工业出版社出版

18.4 越野车辆的平顺性
平顺性与地面不平度激励下车辆振动和车辆振动对驾驶员和乘员的舒适性影响有关。为了评价越野车辆平顺性,对人体对振动的响应、地面不平特性、车辆振动行为建模有基本理解是必不可少的。
18.4.1 乘坐舒适性标准
多年以来,大量研究致力于定义人体全身振动暴露可接受界限。已经提出了平顺性标准,其中国际标准IS02631应用最为广泛[1,20]。其考虑了对人体振动响应最重要的四种物理因素,即振动的强度、频率、方向和持续时间(暴露时间)。国际标准IS02631-1:1985(E)于1985年发布,定义了全身振动的三个界限,频率范围为1~80Hz
1.疲劳-工效降低界限
这个界限是指超过振动暴露的界限,在许多任务中,如车辆驾驶,视为具有明显降低工作效率的风险。
2.暴露极限(健康或安全)
暴露极限是关于频率和暴露时间的函数,具有与疲劳-工效降低界限相同的一般形式,但是相应的界限值提高了2倍(高6dB)。没有特殊的理由和预防措施,不建议超过这个界限。
3.舒适降低界限
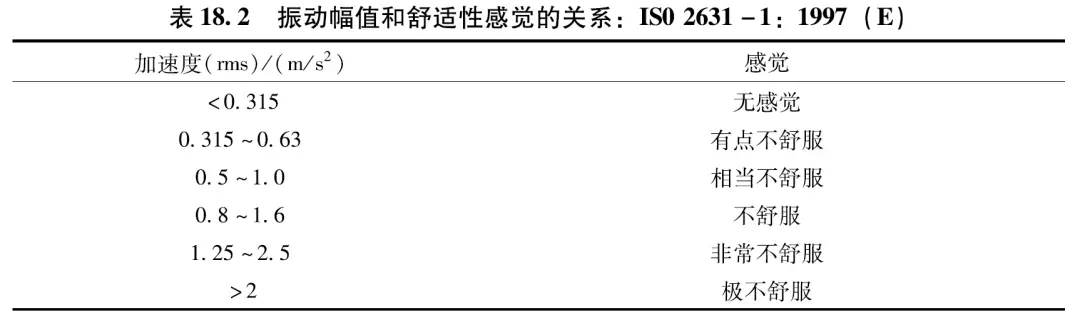
通过降低相应的疲劳-工效降低界限值3.25倍(低10dB),得到舒适降低界限值。在运输业中,舒适降低界限与如吃、读和写等活动造成的困难相关。最新版本的国际标准ISO2631-1:1997(E)发布于1997年,推荐使用频率加权加速度均方根值(rms)在0.5~80Hz范围评价全身振动对健康、舒适和感知的影响,在0.1~0.5Hz范围评价对运动病的影响。在最新的版本中,不再包含振动对人体性能的潜在影响,即前一个版本中的疲劳-工效降低界限。峰因子定义为频率加权加速度最大瞬时峰值与其均方根值之比,对于峰值因子小于9的振动,表18.2给出了振动幅值与舒适性的关系[20]
“吸收功率”代表了单位时间内传递到人体的振动能量,也被提出作为评价人体对振动承受能力的一个重要参数。其用于评价军用车辆在崎岖地面的平顺性,尤其是在美国。现在,驾驶员位置的承受界限为吸收功率6W。平顺性极限车速取为驾驶员总时间内平均吸收功率达到持续6W的车速。对于具有高峰值因子表征的振动环境,垂直峰值加速度通常与吸收功率一起使用评价平顺性。推荐的驾驶员座椅下地板的峰值加速度界限为2.5g。
18.4.2 地面不平度的描述
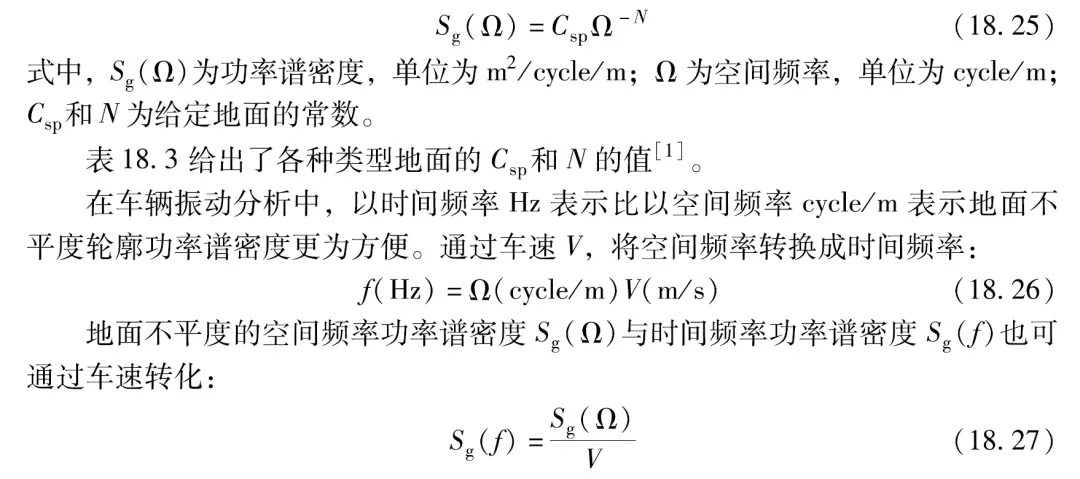
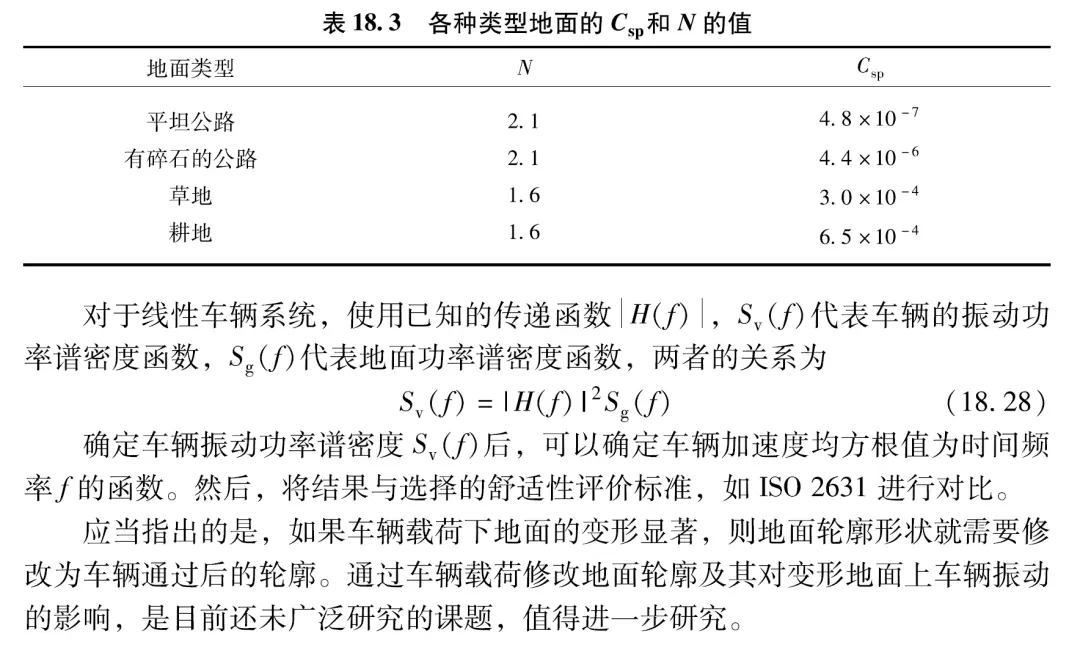
为了预测地面不平度激励的车辆振动,通常使用两种方法定义地面。如果研究车辆振动的时间历程,则测试地面轮廓直接作为车辆振动分析的输入,这种类型的分析通常称为时域分析。通过处理车辆振动的时间历程,可以获得振动谱从而可以确定振动强度,如加速度均方根与激励的关系。另一种方法将地面轮作为随机函数,利用功率谱密度作为空间频率的函数表示[1。对于线性车辆系统,通过传递函数,可以预测在地面不平度(输入)激励下的车辆振动(输出),这种类型的分析通常称为频域分析。许多情况说明,地面轮功率谱密度和空间频率的关系可以近似为
18.4.3 越野车辆行驶动力学建模
越野轮式车辆行驶动力学建模方法与道路车辆类似。既然道路车辆行驶动力学已经在本书的其他章节广泛包含,在此不再重复叙述在一些方面,履带车辆行驶动力学建模与越野轮式车辆类似,因为它们具有类似的悬架单元,如弹簧和减振器。然而,由于带包裹着负重轮、链轮、惰轮和支撑辊轮,增大了复杂性,如图18.22所示。
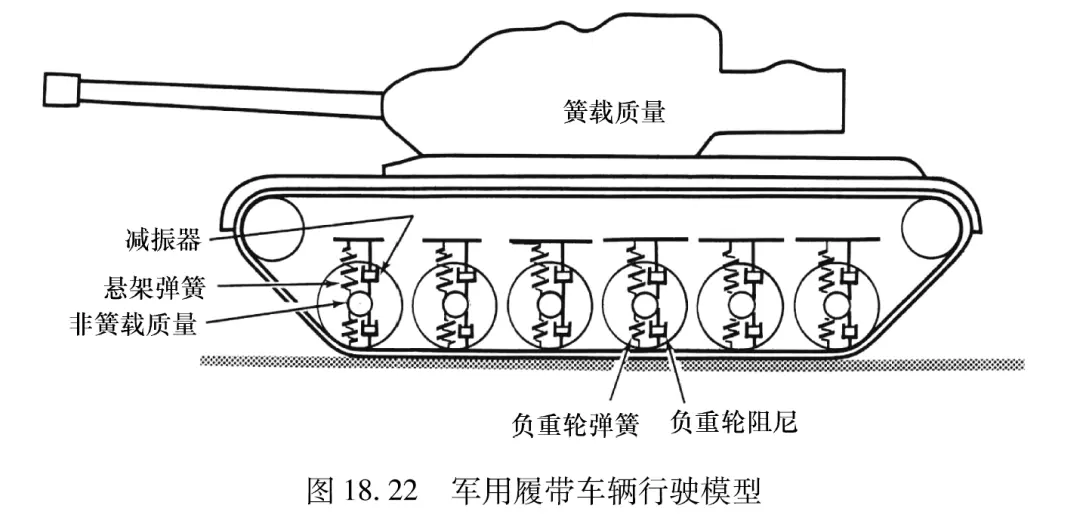
履带是在车辆簧载和非簧载部件之间传递质量的机构,是具有可变刚度的弹性单元,是地面轮廓滤波器,也是附加阻尼和能够引起自身振动的附加系统。在现有的履带车辆行驶动力学模型中,各种假设用于建立带的模型。在一些模型中,履带理想化为连续柔性带,不可伸长或可伸长但具有已知纵向刚度。而在其他情况下,假设履带为具有销或橡胶衬套的刚性连接系统。
履带张力分布有各种假设,从假设履带张力为常数,到假设负重轮之间的带张力等步长增大或减小,再到假设履带张力连续变化,这些都在带车辆行驶动力学模型中使用过[22,23]。然而,现有模型没有考虑履带和地面的剪切作用产生的履带张力沿履带变化。
在早期的车辆动力学模块中,如北约的参考机动性模型(NEMM)中的VE-HDYN,履带按以下步骤建模
1)如果地面轮廓与链轮(或惰轮)和相邻负重轮的切线干涉,则履带将发生变形与轮廓相符。这种变形会使得履带应力增大,将通过链轮(或惰轮)和负重轮传递到车辆上。通过假设一个虚拟线性弹簧垂直作用在链轮(或惰轮)和负重轮之间,估计履带张力的增加。这个弹簧产生的力由其刚度和垂直于链轮(或惰轮)和负重轮之间切线的履带最大变形决定。弹簧力与带张力方向相反。一旦计算出履带张力,传递到链轮和负重轮的力与力矩就可以容易确定。2)负重轮之间相对位移也会导致履带变形,产生的带张力增加在移动的负重轮上产生恢复力。这种行为通过一个垂直约束的虚拟线性双向弹簧建模。如果负重轮相对于相邻负重轮产生移动,则虚拟弹簧将产生垂直恢复力,大小与相邻负重轮相对位移成正比。
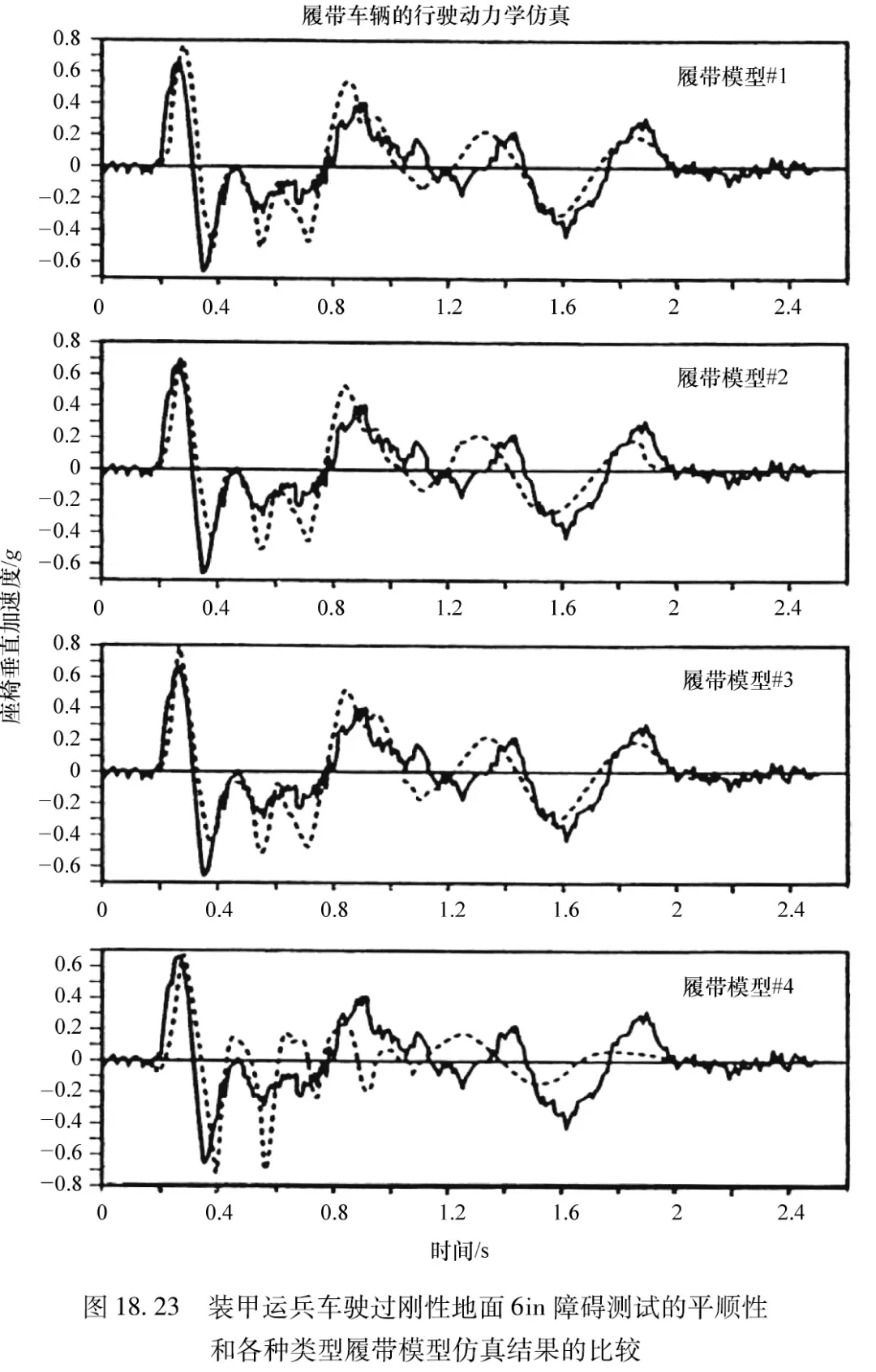
一种增强的NRMM车辆动力学模块,VEHDYN4.0在2008年发布[251应当指出的是,现有履带车辆行驶动力学分析都是基于刚性地面(不变形)假设的。试验证明,这些模型只在具有离散障碍或特定轮廓的刚性地面使用。18.23给出了装甲运兵车使用不同履带模型驶过刚性地面6in障碍的驾驶员座椅垂直加速度的试验和预测结果的比较[22]。在图18.23中,履带模型#1假设履带张力为初始张力与履带拉伸产生的张力之和;带模型#2,链轮和惰轮之间的履带凹陷通过二次多项式表示,包含在动态履带载荷评价中;带模型#3类似于履带模型#2,除了履带凹陷建模不同,基于经典悬链线法建立;带模型#4基于前面提到的 VEHDYN 早期版本建模。
应当注意的是,虽然履带车辆通过不平刚性地面的平顺性可以作为比较不同悬架设计的基础,但是不能表示履带车辆在实地行驶的行为。Caterpilar进行的D8L履带拖拉机实地振动行为的研究发现,应该考虑土壤的动态刚度和阻尼系数的影响[26]
应当提到的是,近年出现了一些多体动力学计算机软件包,如ADAMS和DADS,已经用于仿真轮式车辆和履带车辆通过障碍或粗糙刚性地面的动态行为具有令人鼓舞的结果。
总之,根据前面的简短讨论可知,针对越野车辆通过不平刚性地面的行驶动力学研究已经开展了大量工作,取得了相当大的进步。然而,针对越野车辆在变形地面的行驶动力学的研究目前还很少,这些地面的轮可能因通过车辆载荷引起变化,地面的刚度和阻尼可能对车辆的振动具有重要影响。
18.5 结论
1)近年出现了全面和现实的计算机仿真模型,用于预测和评价越野轮式车辆和履带车辆在未准备地面的性能(机动性)。其考虑了所有主要的车辆设计参数和相关的地面特性,这些模型的基本特点都通过场地试验数据进行了验证。因此,在未准备地面上,这些计算机仿真模型可以比之前的经验方法和半经验方法
提供更加真实和准确的车辆性能(机动性)预测结果。2)最近研发了履带车辆在硬地面上的滑移转向广义理论。应用这种新理论预测的履带车辆转向行为与场地测试数据非常相似,对已有方法提供了重要改善。推荐通过进一步研究扩展这种理论,用于预测和评价履带车辆在变形地面的转向行为,其中地面变形可能是显著的。
3)近年越野车辆行驶动力学的研究取得了很大进步,包括行驶在不平刚性硬地面上的轮式和履带车辆。应当进一步将这些模型扩展,用于预测在变形地面上越野车辆的行驶动力学。其中,地面轮会因为车辆载荷发生显著改变,地面的动态刚度和阻尼可能对车辆振动产生很大影响。
本文摘编自《车辆系统动力学手册 第2卷,整车动力学》 ,机械工业出版社出版,经出版方授权发布。
本丛书对车辆系统动力学建模、分析与优化,车辆概念和空气动力学,充气轮胎和车轮-道路/越野,车辆子系统建模,车辆动力学和主动安全,人机相互作用,智能车辆系统,以及车辆事故重建被动安全进行了全面描述。
本丛书由来自23所大学与9家知名企业的50余位专家共同编写,以科学界与工业界的视角对知识结构进行了平衡,代表了目前车辆系统动力学技术发展的水平,适合汽车工程师与汽车专业师生阅读使用。
来源:汽车测试网
作者:李杰教授领衔翻译













