1.R158法规背景意义
2.R158法规的技术要求
3.R158法规认证测试要求
1. R158法规的背景意义
2015年4月21日,南京交管部门针对4月1日至19日发生的交通事故进行了微统计,20天内发生564起因倒车引发的事故,平均每天有近30起。
重庆九龙坡警方梳理了2016年1月1日至2017年3月31日期间辖区道路交通事故。根据统计,倒车事故成为继擦挂、追尾之后的第三高事故类型,达到3675起,较2015年同期增长5.8%。

倒车事故在事故中的占比越来越高,为减少倒车事故的发生及倒车事故中人员的伤亡,欧盟(EU)2019/2144通用安全法规GSR要求:
从2022年7月6日开始,所有新申请欧盟型式认证的M类和N类车辆都应该安装满足UNECE R158法规的倒车监测系统。
从2024年7月7日开始,所有新上牌的M类和N类车辆必须装备符合UNECE R158要求的倒车监测系统。
UNECE R158:UN Regulation on uniform provision concerning the approval of devices and motor vehicles with regard to the driver's awareness of vulnerable road users behind vehicles when reversing.用于倒车和机动车关于驾驶员识别车辆后方弱势道路使用者的设备核准的统一条款。
UNECE R46《汽车后视镜及安装后视镜的汽车认证的统一规定》,是针对汽车(电子)后视镜及安装(电子)后视镜的认证法规标准,提供了机动车间接视野的条款。
R158法规的目的是为驾驶员提供倒车时有关弱势道路使用者接近感知的规定,该法规在车辆倒车时扩展了驾驶员视野或车辆对后方的感知。因此,本法规的一些要求可以由符合R46的设备满足。

2. R158法规的技术要求
2.1 基本要求
在倒车时,车辆应至少向驾驶员提供一种后方近距离弱势交通参与者(行人、自行车骑行者等)的视觉感知或探测感知的方式。
视觉感知可能的方式有:
(a) 直接视野(驾驶员直接回头看或类似挖掘机可180°调转驾驶舱);
(b) 符合UN R-46规定的设备(符合R46且能在倒车时提供R158规定的后方视野的电子后视镜);
(c) 符合本法规的近距离后视镜(一般指车内电子后视镜);
(d) 符合本法规的后视摄像头系统(常用的倒车影像、360环视系统等)。

探测感知可能的方式有:
(a) 符合本法规的探测系统(常用的倒车雷达,超声波雷达、高端车型的后向激光雷达等)。

当车辆装有多个后方近距离感知装置时,主机厂应指定使用哪个(一个或多个)装置来满足本法规的要求。
当车辆处于主动车辆模式且驾驶员或系统(智能驾驶、辅助泊车)将车辆方向选择器位置从前进D、驻车P或空挡N变为倒车R时,倒车事件开始。当以下前进运动条件(由制造商选择)满足时,倒车事件结束。
(a) 速度 ≤ 16 km/h (包括 0 km/h),或
(b) 行驶距离≤ 10 m (包括0 m),或
(c) 持续事件≤ 10 s (包括0 s),或
(d) 车辆方向选择器没有位于倒车位置。
视觉感知系统或探测感知系统应具有良好的电磁兼容性,不会因外部电磁场的干扰而对系统性能产生不利影响。这一点需要体统满足R10.05及以后的版本来证明,默认需要提供系统的R10证书。
8万字、25篇文章全面解读车辆电磁兼容EMC法规R10

2.2 后视野区域要求
不管采用哪种视觉感知方式,R158法规要求至少覆盖以下列平面范围:
(a) 通过车辆尾部最外点后0.3m处的横向垂直面;
(b) 通过车辆尾部最外点后3.5m处的横向垂直面;
(c) 与通过车辆两侧最外点纵向垂直中面平行的两个纵向垂直面。
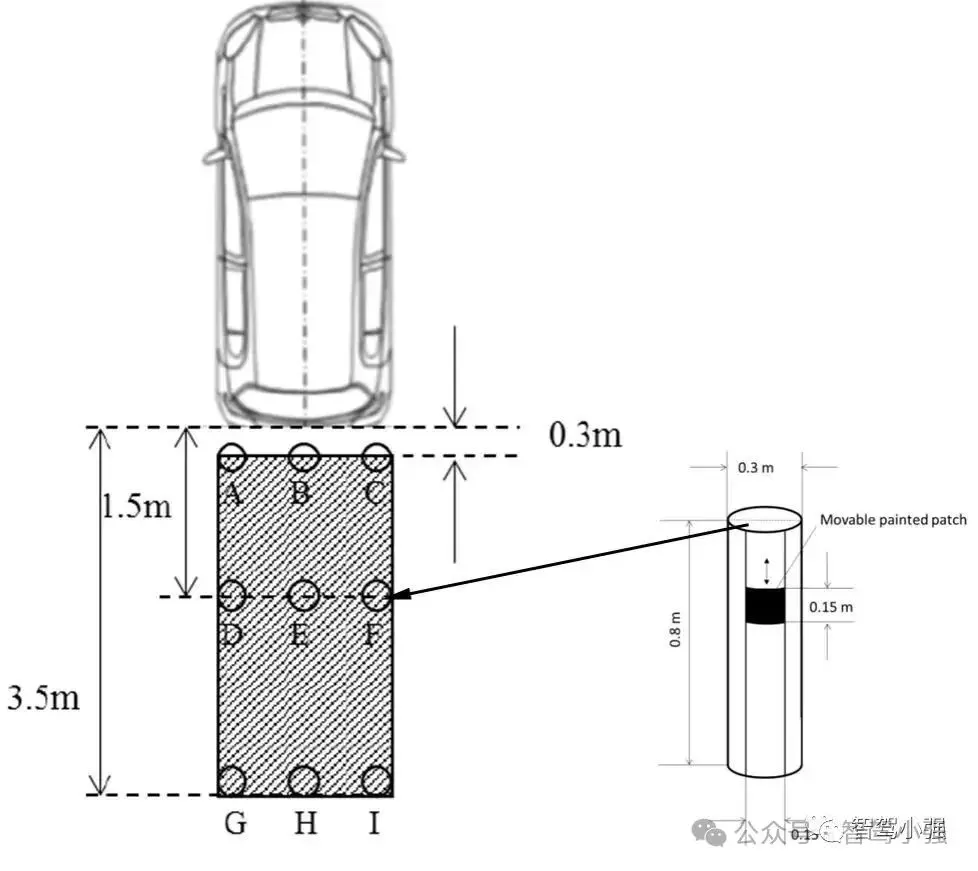
在上图所示的9个位置,使用0.8米高,直径为0.3米的圆柱测试。
a) 对于最靠近测试车辆第一排的测试对象 (测试对象A, B和C),每个测试对象上至少能观察到其中一个可见的0.15 m x 0.15 m的区域(可上下左右调节)或圆柱的顶部。
b) 对于第二排测试对象 (D、E、F) 和第三排测试对象(G、H、I),:需要整个圆柱都能被看见。
2.3 探测区域的要求
探测区域覆盖面积至少包含下图阴影部分区域。
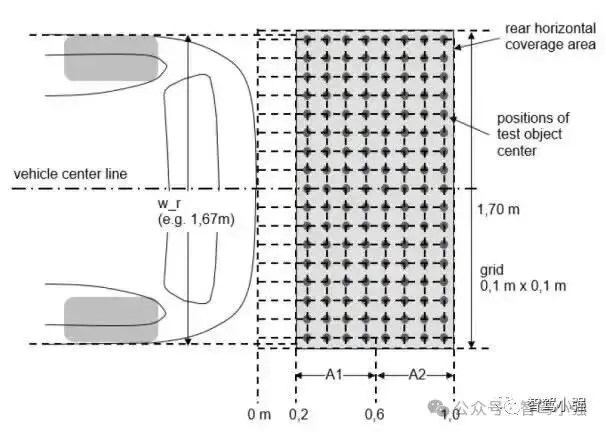
a) 经过车辆尾部最外点后0.2m点的横向垂面;
b) 经过车辆尾部最外点后1m点的横向垂面;
c) 与经过车辆两侧最外点的纵向垂直中面平行的2个纵向垂面。
2.4 系统开关要求
功能失效:
系统因故障而无法运行或无法满足本法规要求的性能时,该故障应被驾驶员识别(例如通过预警指示、显示信息、黑屏、缺少状态指示来表示系统故障),向驾驶员提供的信息应由操作手册予以解释。

系统激活:
当倒车开始时,系统应当激活。如果无法正常运行,系统应自动关闭或由驾驶员手动关闭;只要车辆处于倒挡,系统应当保持激活;在车辆处于拖挂模式时,系统可以被关闭。
后视图像要在倒车开始(挂R档)2s内显示。
使用探测系统时,倒车开始(挂R档)0.6s内要有对应的声学或触觉报警发出。
2.5 后视系统视野要求
默认情况下后视摄像头(RVCS)系统应至少展示近距离后视野所示区域;
在每次倒车事件开始,RVCS系统都默认显示后视图,忽略驾驶员之前对视图的任何更改;
倒车时近距离后视野区域不应出现弹窗、蓝牙电话等覆盖信息,覆盖信息应仅显示与倒车行驶有关的视觉信息或安全相关的信息,如车轮引导线;

只有当驾驶员需要启动向后行驶有关的功能或安全相关的功能(例如清洁透镜或启动拖车挂钩观察)或在这种环境下要求特定信息时,允许手动启动覆盖,驾驶员也可以选择关闭覆盖。
当有碰撞风险时,视角可改变并聚焦于碰撞区域,主机厂应向监测机构证明这种视角改变提高安全性。车辆非直线行驶时,视野可根据车辆轨迹进行变化。
最后一排的全部3个试验圆柱在显示屏上的平均值应不少于5弧分;相关计算见第三章认证测试方法;每个单独试验圆柱不应少于3弧分。
2.6 探测系统的要求
探测系统应至少具有从声学、光学和触觉报警中选择两种报警信号。
只要有一个报警信号保持开启,驾驶员可以关闭其他的报警信号。驾驶员可选择,但不能全部关闭,报警方式的选择可以做成记忆的。
声学报警:当在车辆后方水平区域内检测到目标物时,且车辆位于倒车挡位,应发出符合ISO 15006:2011的声学报警提示。

在呈现声学报警提示时,可以分为二级或者更多级来提示;可以通过改变间歇声音的频率来指示这些通过等级(距离)和检测宽度区分的区域,并且随着距离的接近,应使用更快的间歇声音或连续声音。
报警信号持续时间:只要探测到目标,报警信号就应该持续发出,当不再探测到目标或当系统关闭时,报警信号应当终止。减少驾驶员不适,在系统保持开启的前提下,在经过主机厂设定的某个时间后,声学信号可自动暂停。如果当声学信号自动暂停时与目标间的距离变短,声学信号应自动恢复。如果与目标间的距离变长,声音信号可保持暂停状态。
光学报警:如果探测系统的光学报警在用于其他信息显示的显示器上(例如倒车影像、仪表等),此时允许覆盖叠加,并且应当满足所需视野内的覆盖要求。
来源:智驾小强













