根据中汽学标〔2025〕144号文件发布的《关于印发2025年第二批中国汽车工程学会标准制修订项目计划的通知》,中国汽车工程研究院股份有限公司与清华大学联合牵头的《乘用车避障紧急变线无人试验方法》团体标准已按《中国汽车工程学会标准(CSAE)制修订管理办法》有关规定通过立项审查,起草任务书编号2025-009,现向全行业征集参编单位。


01、标准研制背景
1、随着乘用车智能底盘技术快速发展,麋鹿最高通过车速成为衡量底盘智能化水平的重要指标。现行ISO 3888.2与GB/T 40521.2标准(规定了“麋鹿测试”路径与通过性判断方法)采用驾驶员主观操作,试验结果离散度达4-10%,这一固有缺陷,导致相关标准“仅推荐主观评价”,而“不应基于车速进行分级”,难以满足智能底盘客观测评需求。

2、“无人驾驶”技术因其可基于固定规则实现目标路径跟踪,近年来被应用于执行“麋鹿测试”,以消除主观因素干扰,确保测试结果一致性。此外,利用无人试验技术可有效保证试验人员安全,提供安全探知底盘极限性能的方案。

当前已有的4项“无人麋鹿测试”的无人执行系统能力、场地要求、车速采集点、底盘功能组合、底盘功能能力边界都未统一与明确,亟待研究针对性的“无人麋鹿测试”标准以统一测评标尺,填补智能底盘无人化测试方法空白。
02、 标准研究内容
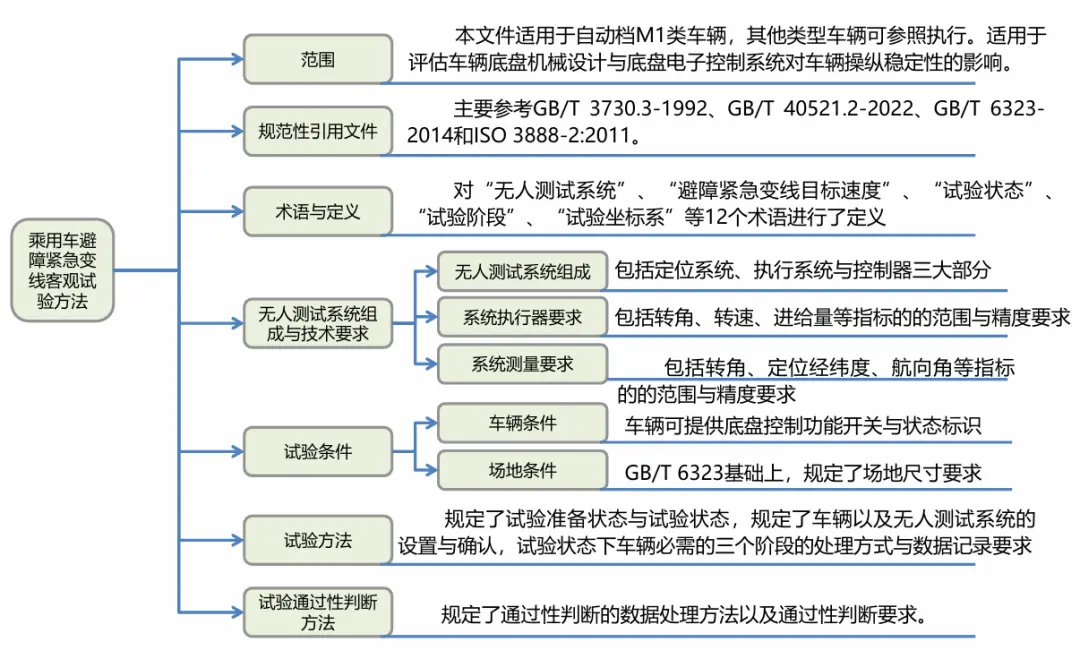
该标准计划从试验执行系统要求、被测系统性能要求、试验流程、试验判据、数据记录等维度,全面规范用车避障紧急变线无人试验方法(“无人麋鹿”试验方法),为智能底盘的最高麋鹿测量提供方法支撑,具体内容如下:
本标准计划应用于搭载智能底盘乘用车的最高麋鹿成绩探寻试验与认证试验。此外,该标准可为高校和科研机构的车辆动力学控制算法仿真分析提供定量评价方法,该方法较传统双移线跟踪精度评价方案,能更科学地反映车辆动力学控制有效性。
03、征集参与单位
《乘用车避障紧急变线无人试验方法》标准项目已启动参编申报,欢迎更多汽车生产制造单位、底盘系统制造企业、高校、科研机构及测试机构参与到标准研究和编制工作中,共同促进和提升汽车智能底盘测评技术发展。
来源:中国汽研