01、引 言
本文基于SDV发展背景,剖析了一份AUTOSAR AP软件架构。包括其主要组成部分、层次结构以及各层之间的交互关系。为了验证该软件架构的可行性与有效性,计划进行模拟部署测试。
同CP平台一样,MATLAB/Simulink通过AUTOSAR Blockset工具箱对AP平台也有了一定的支持,本文将解析下Simulink中AP的模型架构以及进行简单的部署仿真测试。
02、AP模型导入与服务接口分析
1)模型准备
首先准备一下模型文件,该模型文件来源于MATLAB Example;
里面含有一个总括的模型文件:HeadLightControlSystem.slx;三个模型引用的文件:HeadLightActuator.slx、HeadLightController.slx、OutdoorLightSensor.slx以及数据字典:HeadLightControlSystemData.sldd
可以通过下述命令行找到对应的模型示例文件:
open_system("HeadLightControlSystem");
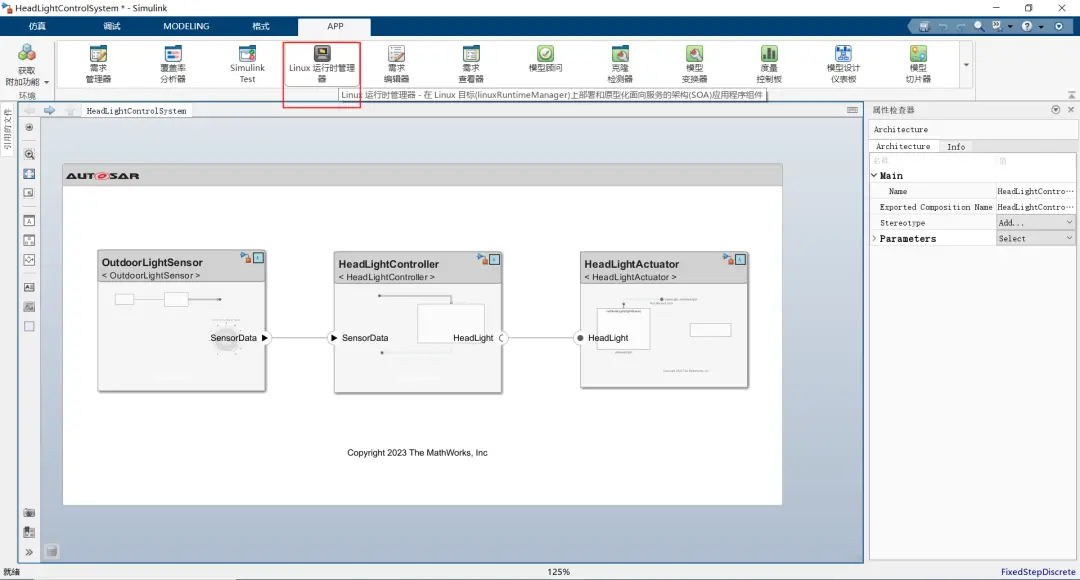
打开总模型文件:HeadLightControlSystem
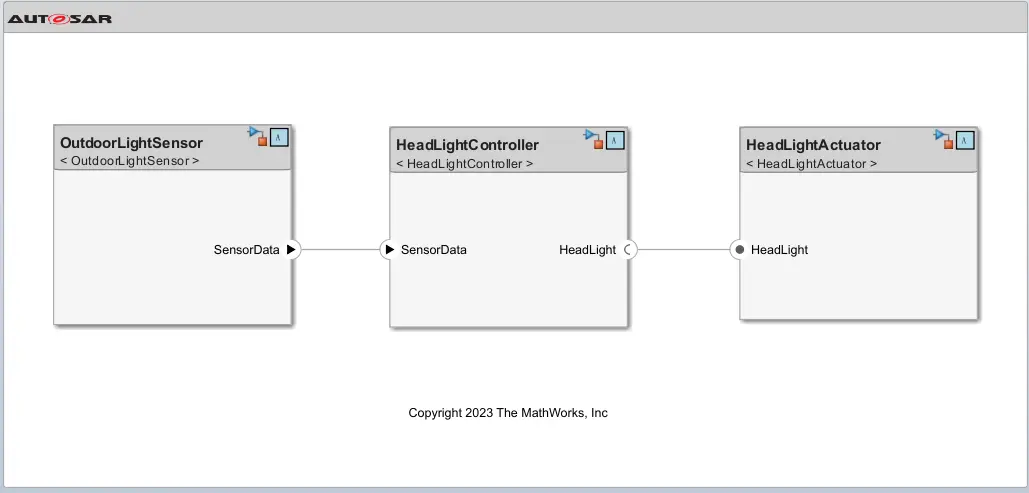
这个架构模型有三个组件,OutdoorLightSensor、HeadLightController和HeadLightActuator。OutdoorLightSensor处理从传感器接收到的数据,并使用自适应事件(adaptive events)将数据发送到HeadLightController。HeadLightController调用HeadLightActuator中的方法,使用自适应方法(adaptive methods)打开或关闭前照灯。HeadLightActuator根据从HeadLightController接收到的输入打开或关闭汽车头灯。
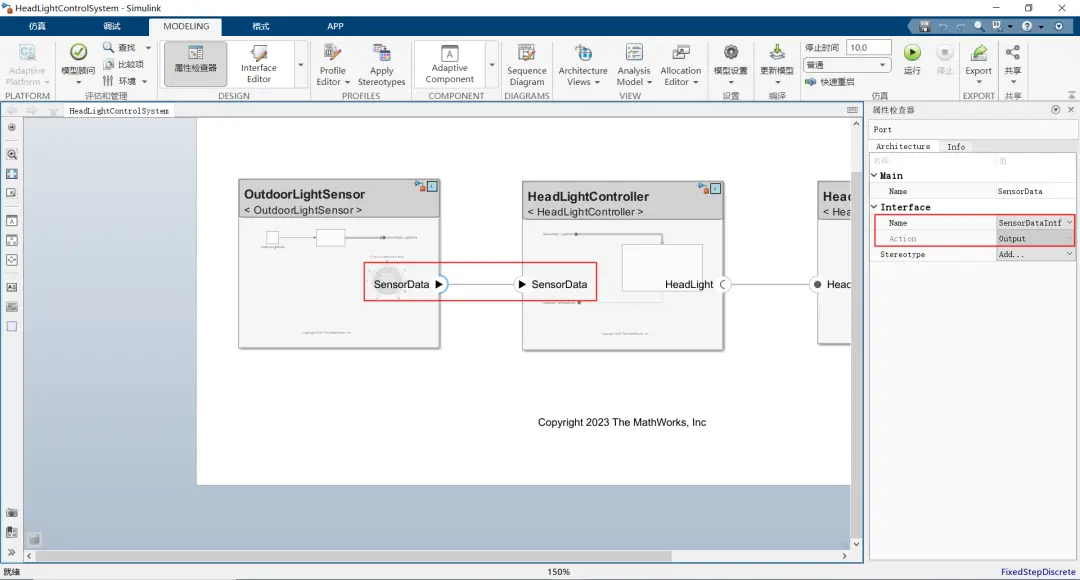
OutdoorLightSensor 上的名为SensorData的port类型是Output,对应的HeadLightController上的SensorData的port类型是Input;Interface类型是SensorDataIntf;
HeadLightController上的名为HeadLight的port类型是Client,对应的HeadLightActuator上的HeadLight的port类型是Server;Interface类型是HeadLightIntf;
下面是针对每个模块的具体分析;
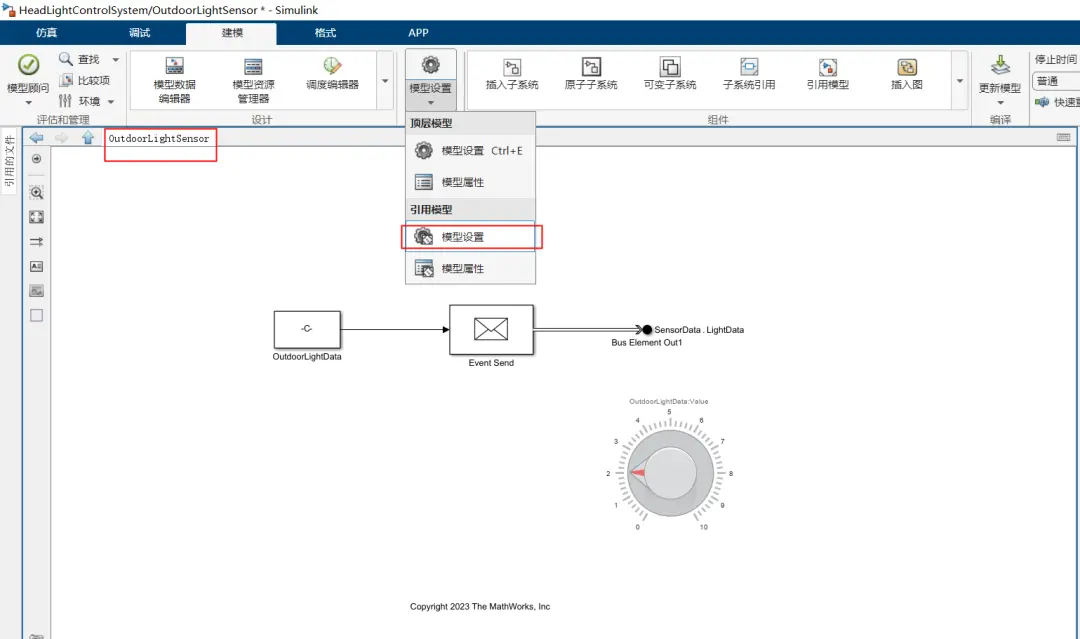
2)OutdoorLightSensor分析
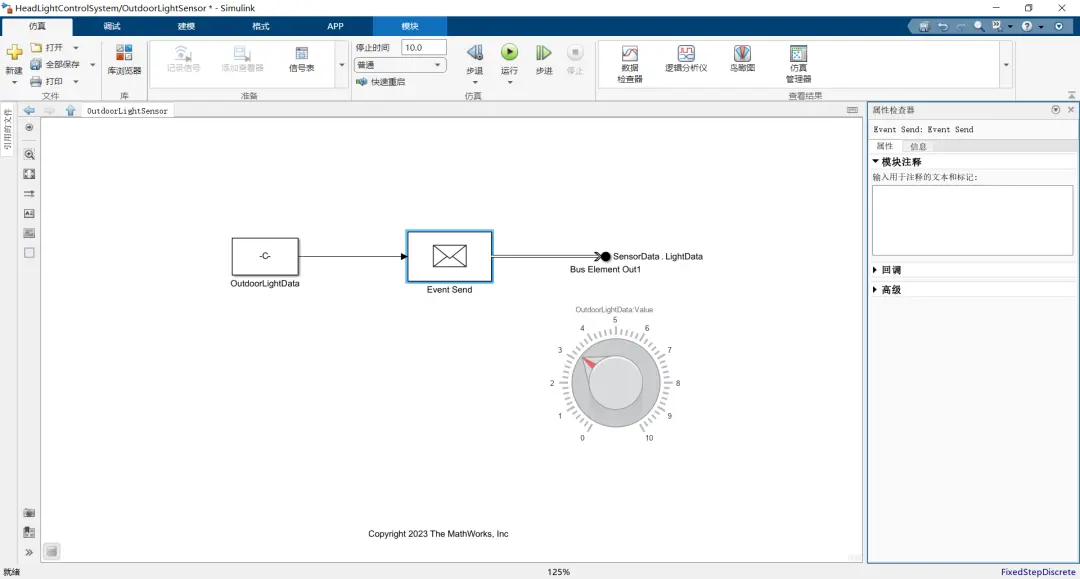
OutdoorLightSensor内部模块与逻辑比较简单,将一个常量OutdoorLightData信号通过Event Send模块转换为message消息,通过“Bus Element Out”端口发送出去;Event Send模块功能是将信号转换为保留信号值和数据类型的事件,专门服务于AP的模块;
打开数据字典:
该模块包含一个Service Interfaces,名为SensorDataIntf,也就是我们从模型概览中看到的port对应的Interface类型;该Service Interfaces只包含一个Event事件,事件接口名为LightData;
该AP应用模块只包含一个ProvidedPorts,名为SensorData,对应上面的Service Interfaces;
这两部分的配置可以理解为,一个名为SensorDataIntf的服务,只包含一个Event事件,在OutdoorLightSensor模块中实例化为一个Provided类型服务,对外部模块(HeadLightController)提供服务,对应服务port名为SensorData;
在Simulink模型中,开发者会构建各种模块以代表不同的系统组件和功能。这些模块在映射到AUTOSAR时,需要对应到AUTOSAR软件组件(SWC)、端口(Port)、数据元素(Data Element)等概念上。通过映射,Simulink中的设计能够转化为AUTOSAR架构下的实现,进而在ECU(电子控制单元)上运行。
因此有如下图的Simulink模块和Autosar元素的map关系:
名为LightData的Bus Element Out Simulink模块关联了名为SensorData的Autosar Provided Port中包含的LightData事件。
3)HeadLightController分析
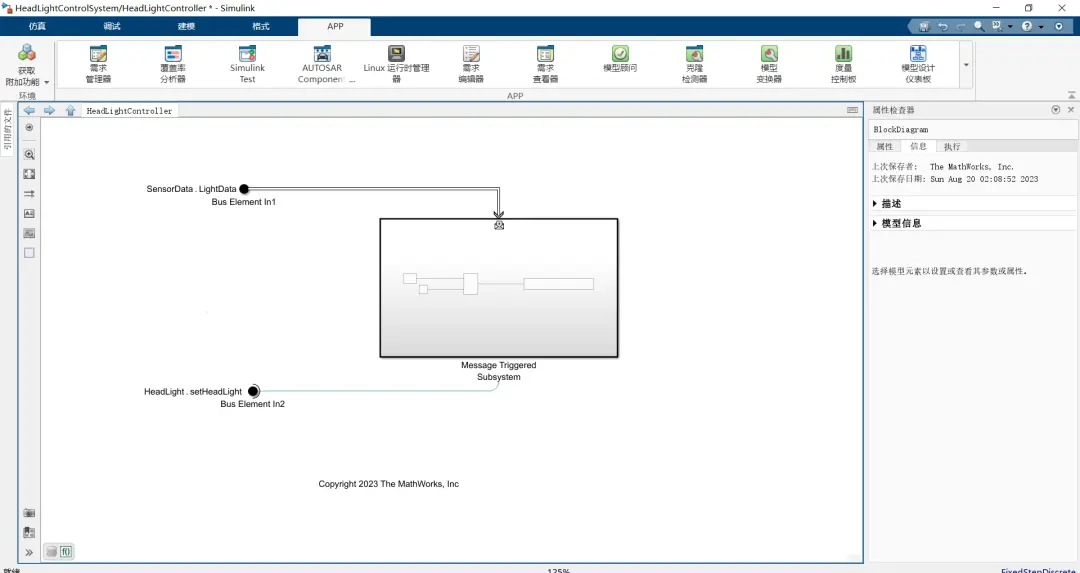
该子系统内又包含了一个消息出发的子系统,这个消息触发源,对应的Bus Element In1,接收的就是OutdoorLightSensor发过来的SensorDataIntf服务中的LightData事件消息;
打开Message Triggered Subsystem:
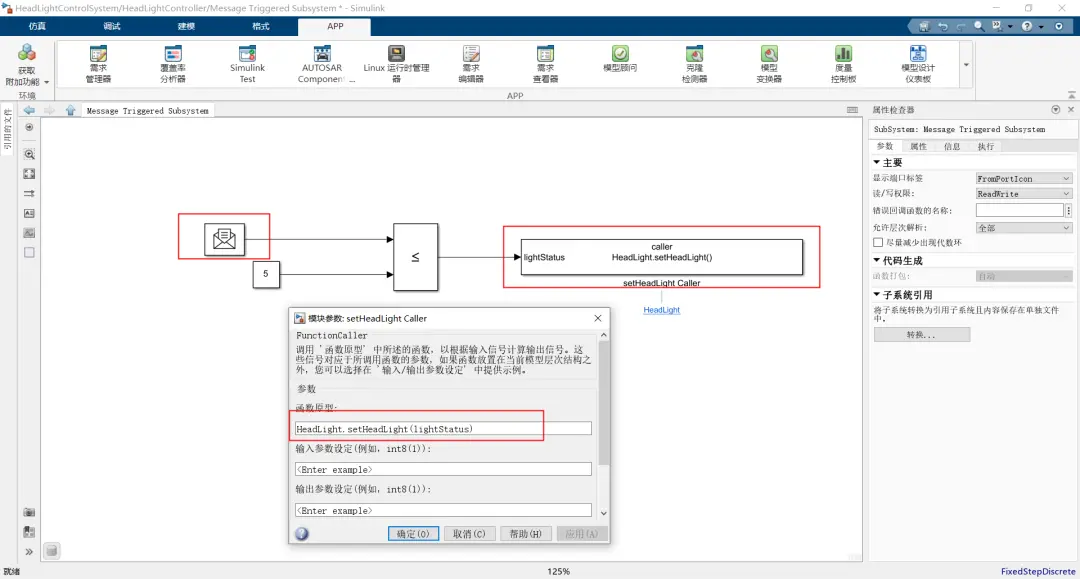
内部包含一个函数调用系统(其实函数原型是服务的port名加上服务里的方法及对应参数构成)。因此从模型上看,该模块又包含了其他服务的Method方法,并且该模块是作为服务的客户端去调用该服务的方法;
打开该模块的数据字典:
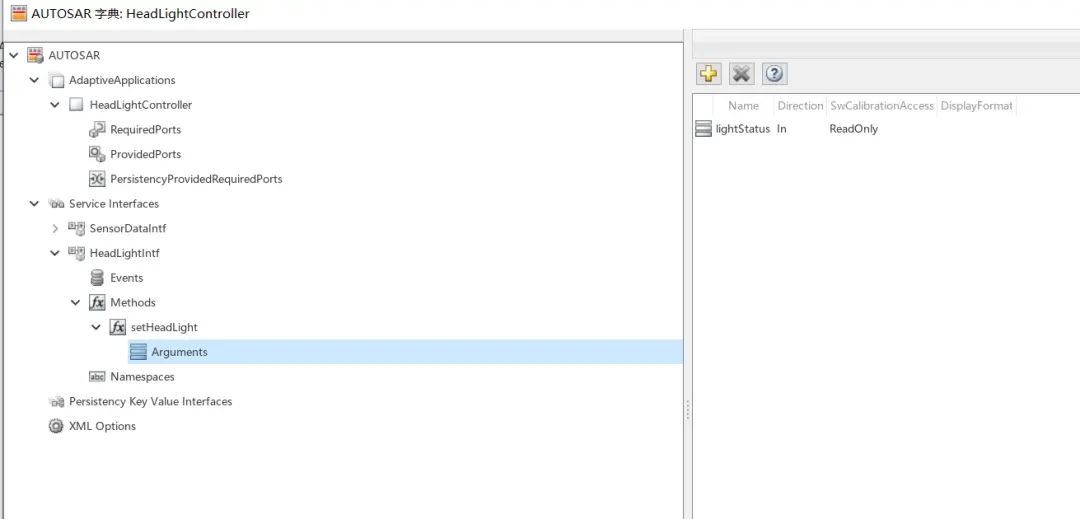
里面包含两个Interfaces,SensorDataIntf与HeadLightIntf两个服务,SensorDataIntf服务与上面OutdoorLightSensor包含的是一致的,只不过这里是作为Client端实现的;
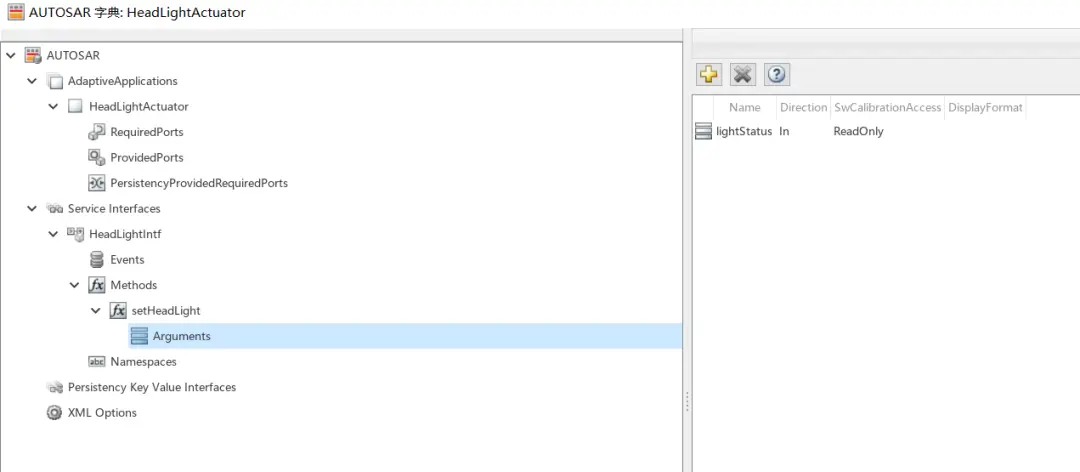
HeadLightIntf这个服务包含了一个setHeadLight方法,该方法只有一个输入参数,lightStatus,因此可以理解为该方法对应的通信类型就是Fire-Forgot类型,只有请求参数,无返回参数。
HeadLightController包含两个RequiredPorts,一个是与OutdoorLightSensor通信的SensorData port,请求LightData事件数据的,另一个HeadLight,是请求HeadLightActuator设置灯光状态的setHeadLight方法;
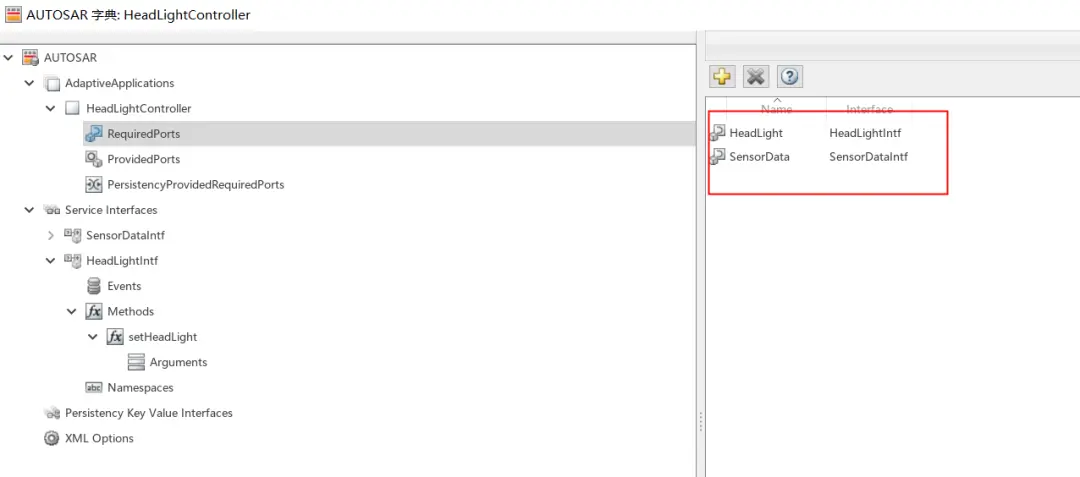
这部分的配置可以理解为,HeadLightController包含两个服务的客户端,一个名为SensorDataIntf的服务,只包含一个Event事件,在HeadLightController模块中实例化为一个Required类型服务,对外部模块(OutdoorLightSensor)请求服务,对应服务port名为SensorData;另一个名为HeadLightIntf的服务,只包含一个Method-FF方法,在HeadLightController模块中实例化为一个Required类型服务,对外部模块(HeadLightActuator)请求服务,对应服务port名为HeadLight;
查看这一部分Simulink模块和Autosar元素的map关系:
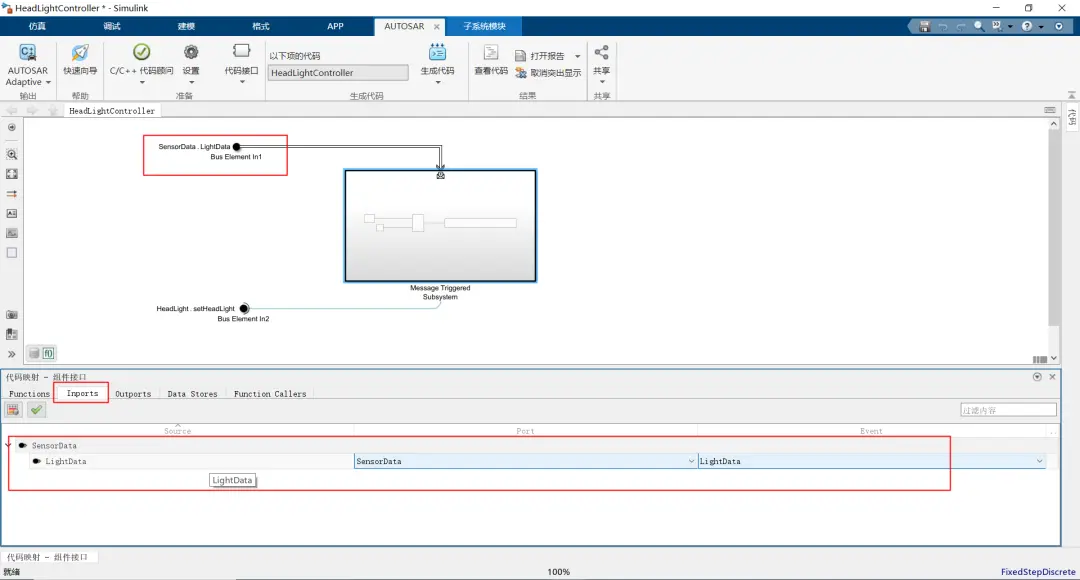
名为HeadLight的Bus Element In2 Simulink模块关联了名为HeadLight的Autosar Required Port中包含的LightData事件。
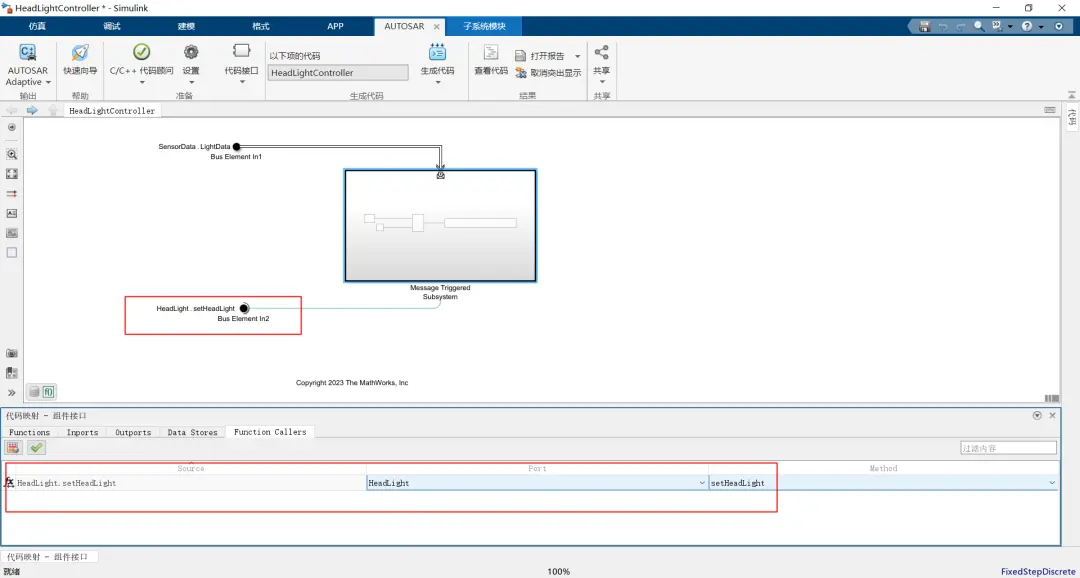
名为LightData.setHeadLight的Bus Element In1 Simulink模块关联了名为HeadLight的Autosar Required Port中包含的setHeadLight方法。
4)HeadLightActuator分析
里面又包含一个函数子系统,不过,从这个层级也可以看出该函数就是服务HeadLightIntf中的setHeadLight方法;

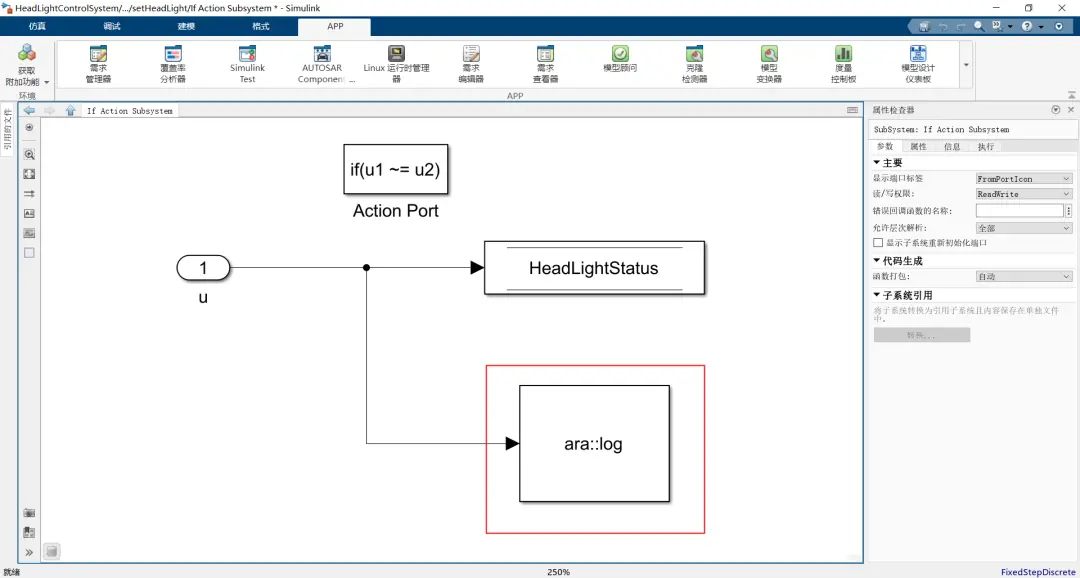
打开子系统,里面展示了函数的输入参数以及还有一个函数子系统;
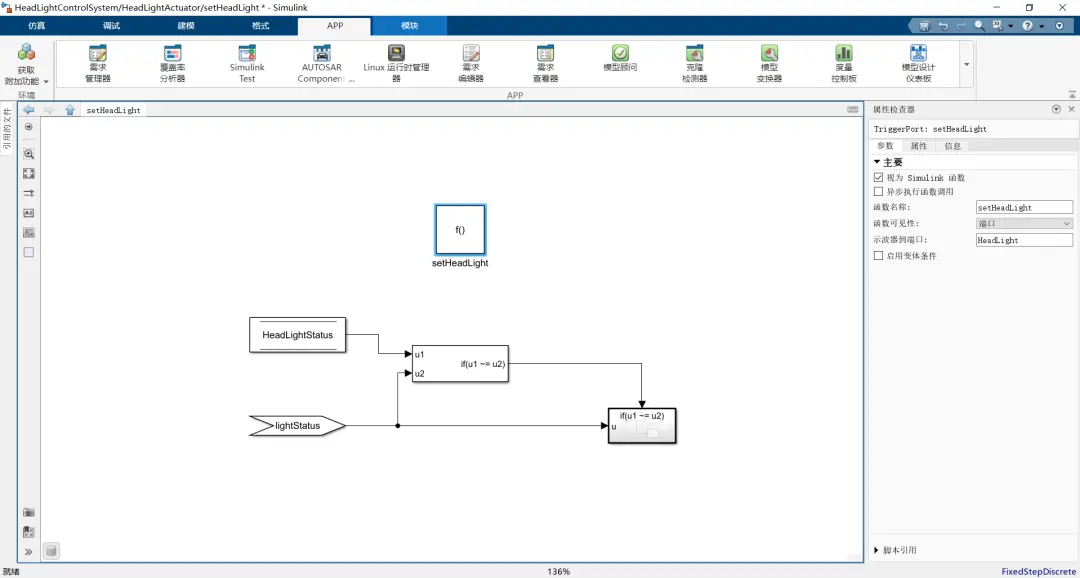
再打开该函数子系统,里面封装了了AP AUTOSAR的ara::log模块,这个我们后续仿真的时候可以观测到。
打开数据字典:
里面包含一个Interfaces,HeadLightIntf,上面HeadLightController包含的是一致的,只不过这里是作为Server端实现的;
HeadLightActuator包含一个ProvidedPorts,是与HeadLightController通信的HeadLight port,提供设置灯光状态的setHeadLight方法;
这部分的配置可以理解为,一个名为HeadLightIntf的服务,只包含一个Method方法(setHeadLight),在HeadLightActuator模块中实例化为一个Provided类型服务,对外部模块(HeadLightController)提供服务,对应服务port名为HeadLight;
打开Simulink模块和Autosar元素的map关系:
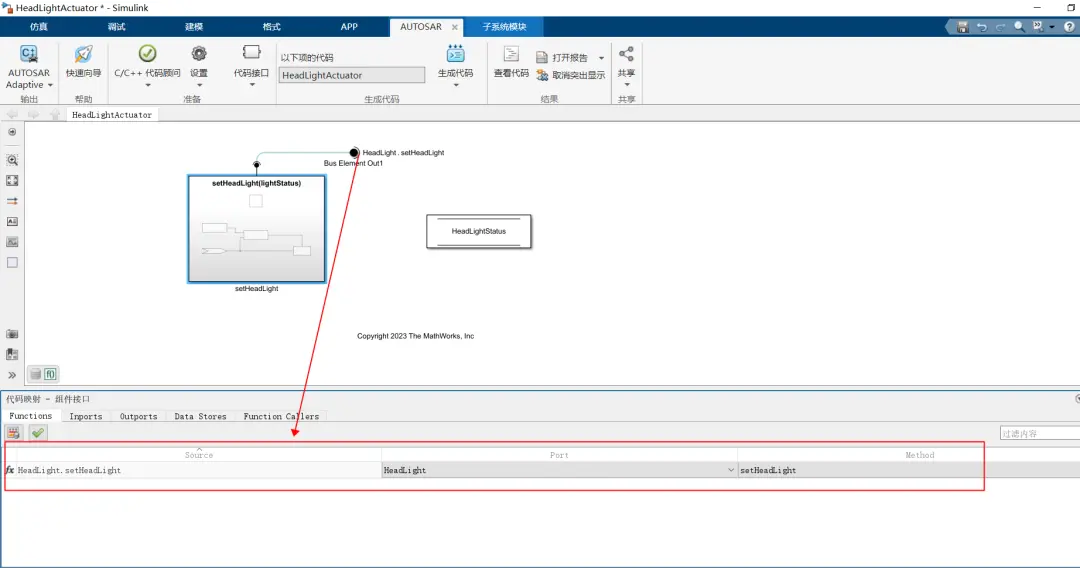
名为LightData.setHeadLight的Bus Element Out1 Simulink模块关联了名为HeadLight的Autosar Provided Port中包含的setHeadLight方法。
03、部署与测试
1)部署目标环境
AUTOSAR AP应用是跑在Linux系统上的,因此需要Linux环境的虚拟机或者服务器,要求可以通过SSH连接,并且知道其IP;测试ip:192.168.24.92;
并且要安装Docker;Docker镜像是一个特殊的文件系统,包含了容器运行时所需的程序、库、资源、配置等文件,以及为运行时准备的一些配置参数(如环境变量、用户等)。镜像不包含任何动态数据,其内容在构建之后也不会被改变。镜像使用分层存储技术,使得镜像的复用、定制变得更为容易。容器是镜像运行时的实体,可以被创建、启动、停止、删除、暂停等。容器的实质是进程,但与直接在宿主执行的进程不同,容器进程运行于属于自己的独立的命名空间,拥有自己的root文件系统、网络配置、进程空间等。这种隔离性使得容器封装的应用比直接在宿主运行更加安全。
这里要做这个模拟部署,Docker是必须的,因为MATLAB是要通过XCP连接,创建Docker镜像,AP应用运行在该镜像实例化的容器内。
2)模型配置
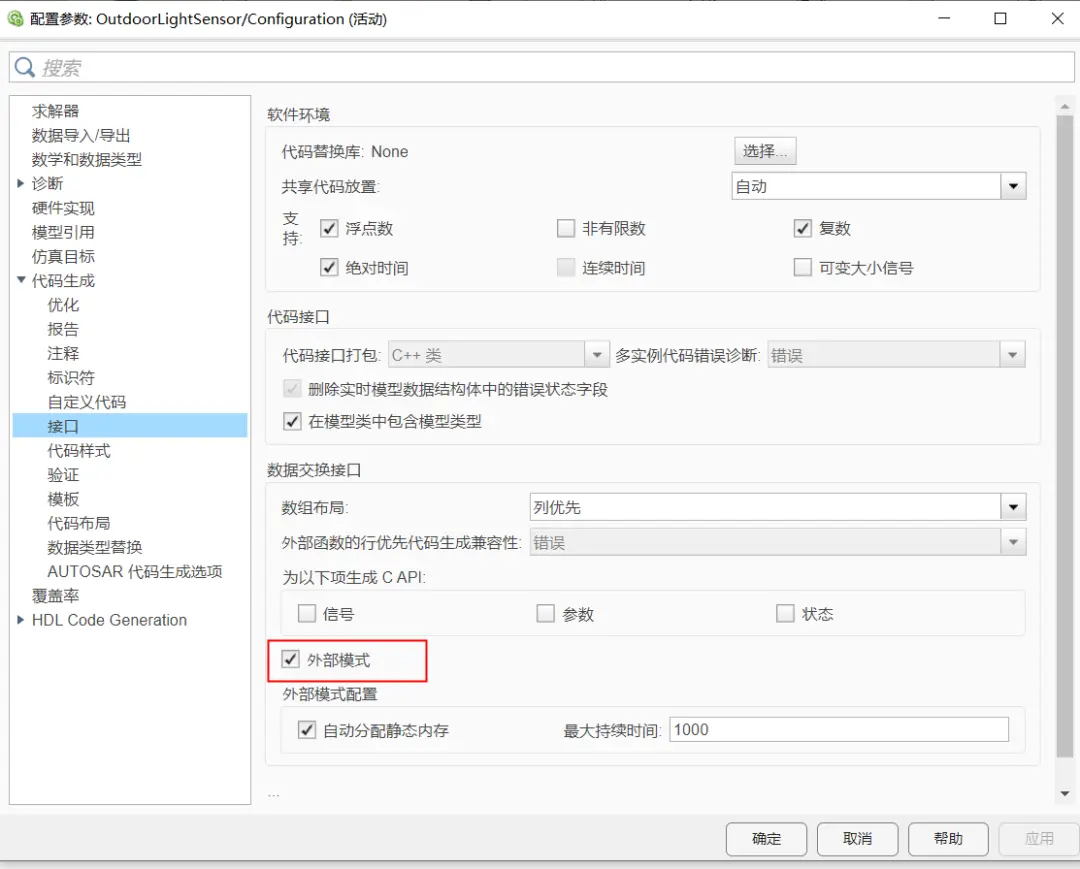
对OutdoorLightSensor子系统进行配置
代码生成→ 接口→ external mode(外部模式)勾选上
硬件实现要配置为:Embedded Coder Linux Docker Container
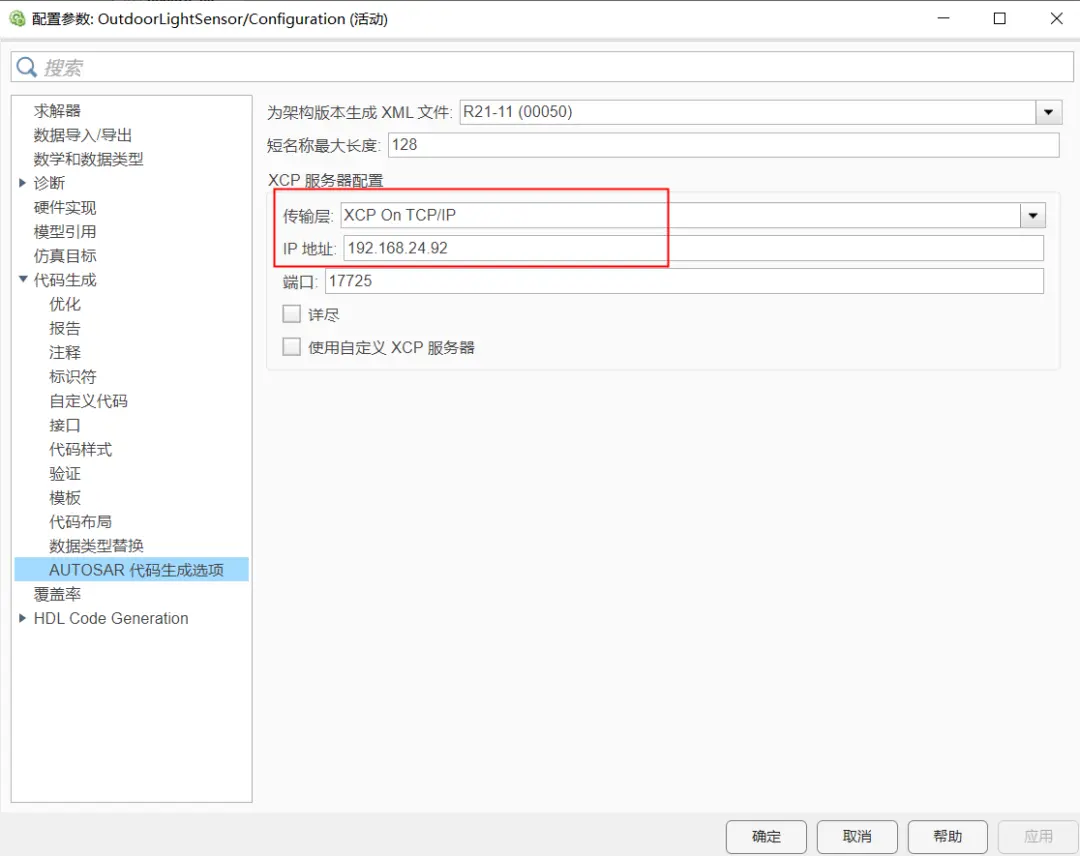
配置XCP服务器,输入目标机的IP;
3)部署模拟
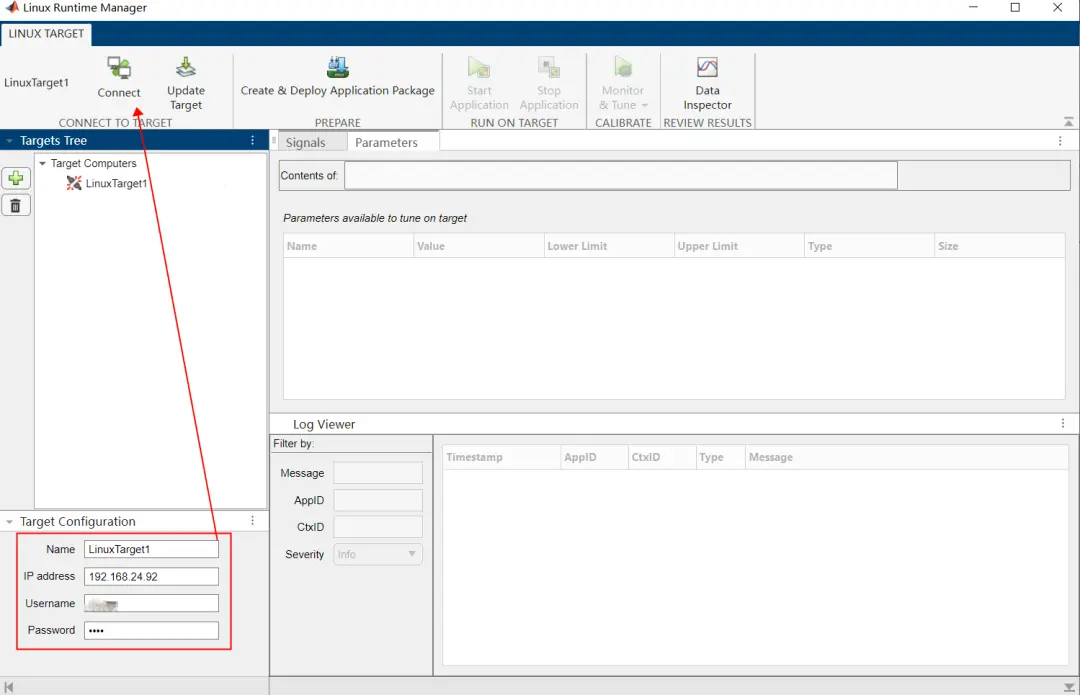
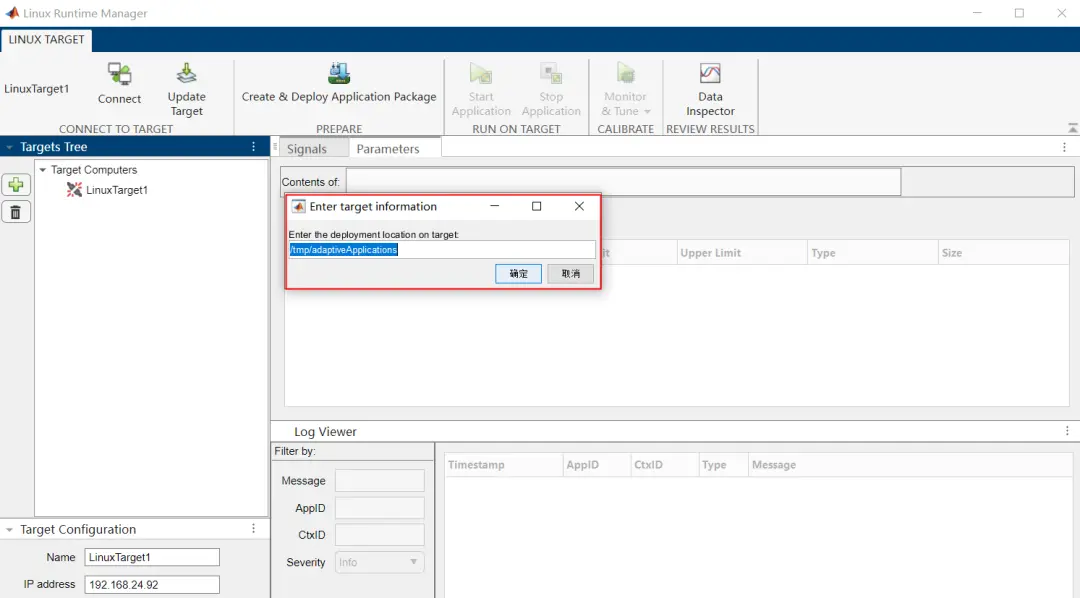
打开Linux运行时管理器
输入配置信息,并Connect;如果之前并未连接过该Linux环境,Connect会失败,需要点击旁边的Update Target,这步骤就是将模拟部署需要的镜像matlab-ecoder-linuxruntime-image发送过去,这一步骤时间可能较长;如果之前连接过该Linux环境,进入该界面后会自动连接上;
配置,目标APP在目标Linux环境下的安装位置;选择一个仅自己使用的文件系统下就好;
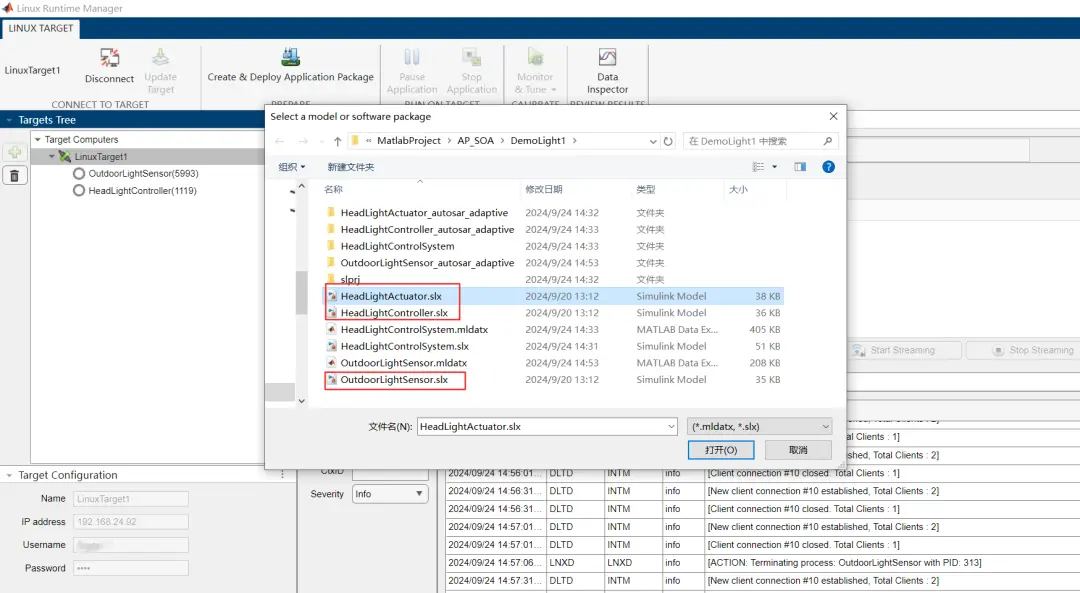
点击Creat&Deploy Application Package,选择子系统slx文件;三个子系统重复这个操作;
编译子系统,生成mldatx文件,发送到Linux环境中,自动部署;
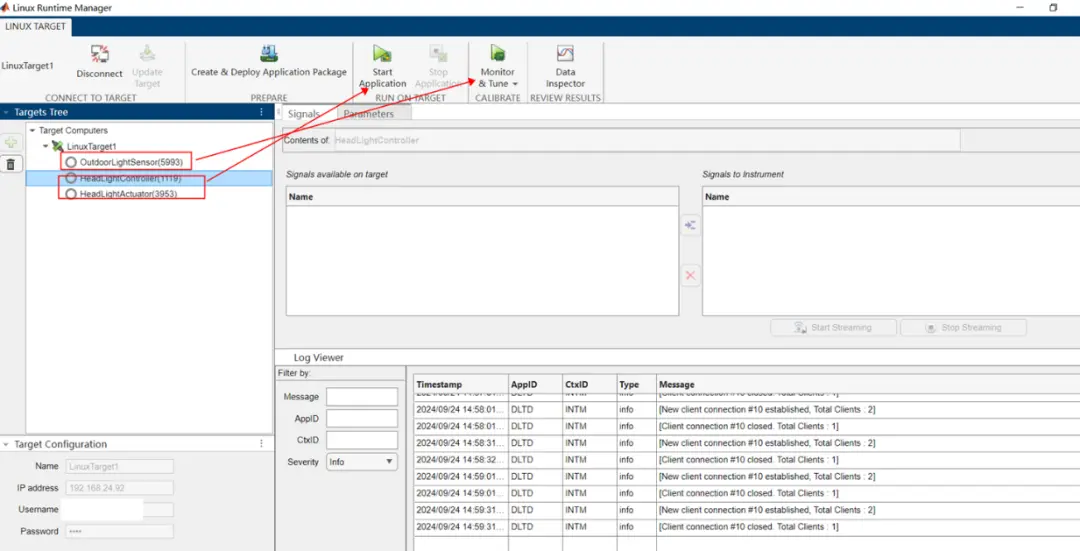
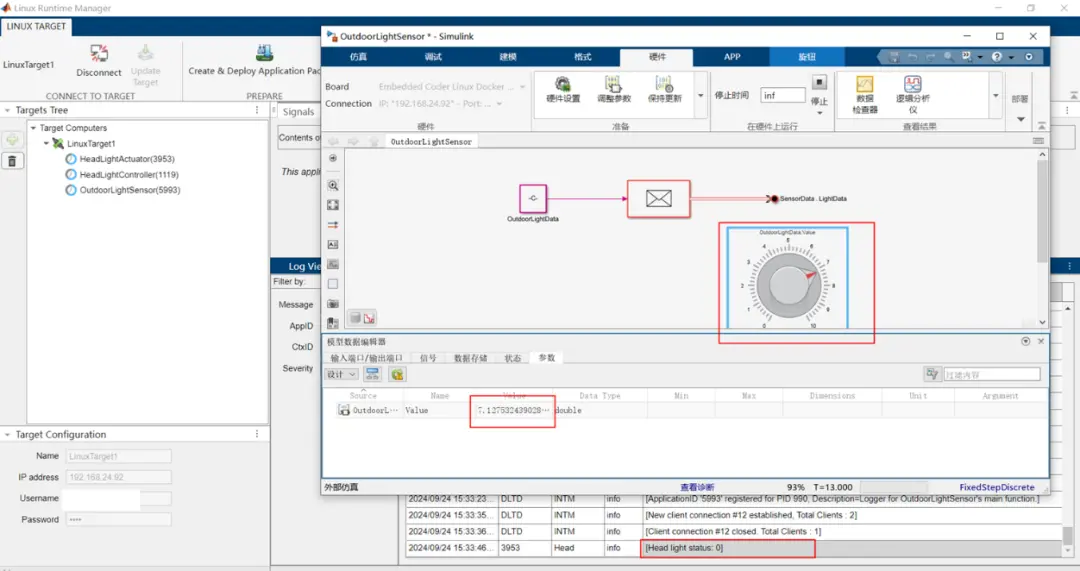
对Sensor这个app启动Monitor&Tune,对Controller和Actuator这两个app启动 Start Application;将三个应用都启动,并观测;
因在Actuator模块中封装了ara::log模块,所以从log上可以看到对应灯光状态值为1;
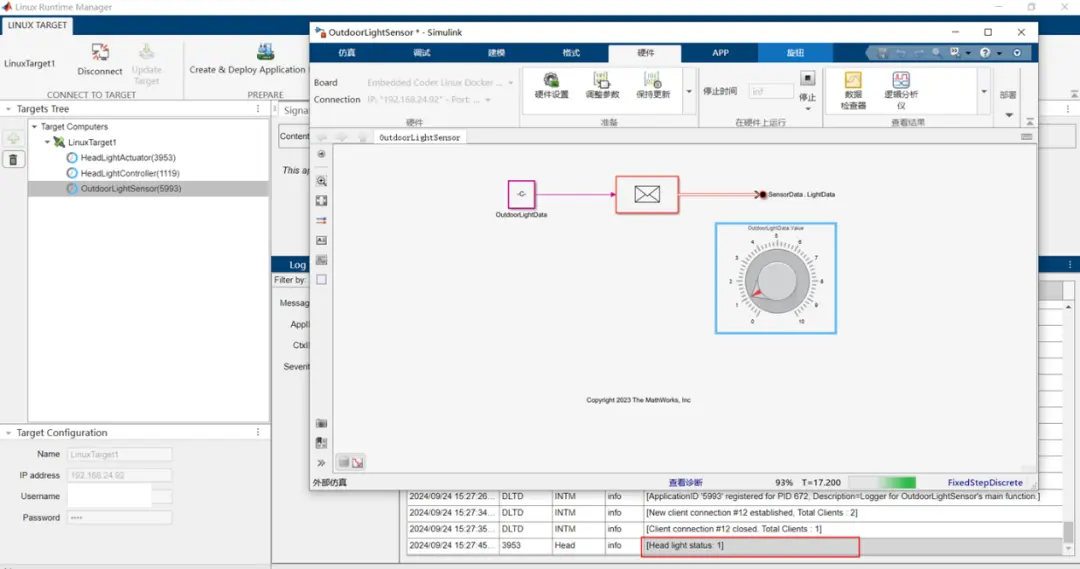
修改Sensor模块中输入的lightData,使其大于5,从log中可以看出此时灯光状态值变为了1;
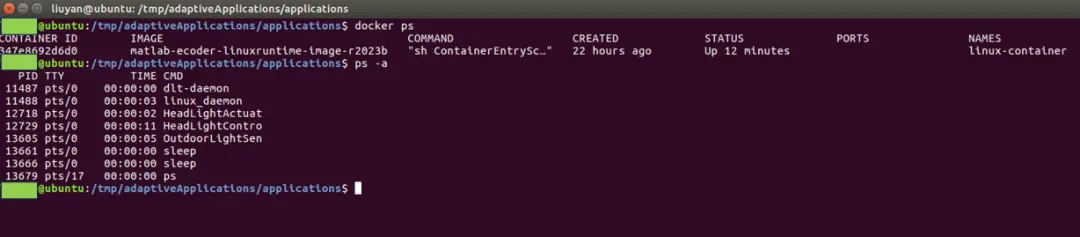
从Linux环境中也可以看出正在运行的matlab linux环境下的 ecoder image;
同样,也可以查看上面三个模块app对应的进程。
04、小 结
本文详细的剖析了一个AUTOSAR AP应用层模型,想要全面揭示其AP架构设计背后的逻辑与精髓,分析其各个核心元素含义,这些元素作为AUTOSAR AP模型构建的基础,包括但不限于软件组件(SWCs)、服务、服务接口、通信Port以及数据管理机制(如客户端-服务器模式的数据访问)并且解析了与Simulink模型的对应关系;
后面又搭建环境,部署应用,测试了模型的逻辑性,这一过程不仅验证了模型设计的正确性,也体现了AUTOSAR AP平台在实际开发中的灵活性与高效性。
这个过程体现了AUTOSAR AP平台的一种开发方法,基于MBD的开发带来了一定的直观性的便利,但在面对复杂的AUTOSAR AP元素配置时,其直接性仍有待提升。特别是当涉及到大量细致的配置项时,MBD方法可能无法完全覆盖所有细节,需要开发者结合文档与经验进行手动调整;因此可选择性的交流本文的开发思路,而非具体的配置项。
来源:汽车电子与软件













